|
|
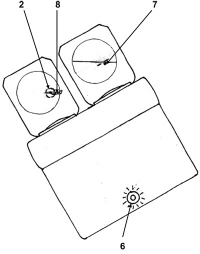
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
FPL35 Draken, SAAB 35 - Det första svenska Systemflygplanet för System J35A Skrivet av Göran Hawée. Uppdaterat 2018-08-22 BakgrundUnder andra världskriget utvecklades jaktflyget för att bekämpa fientliga bombflygplan, som i huvudsak verkade med insatser mot mål med stor utbredning som industriområden men även bostadsområden i terroriserande syfte. Även eskorterande jaktflyg skulle i viss mån kunna bekämpas varför jaktflygplanen måste ha allsidiga prestanda. De utrustades även för attackuppdrag om vapen fanns tillgängliga och kunde anpassas till flygplanen. Jaktflygplanen var därför försedda med kanoner och raketer och senare även med målsökande robotbeväpning. Svenska Flygvapnets (FV-s) jaktförsvar utvecklades under 1940- och till mitten av 1950-talet med en flora av utifrån anskaffade jaktflygplan som J26 Mustang, J28 Vampire och J33 Venom samt de svensktillverkade Saab J21, FFVS 22 J22 och J29 Tunnan.Även efterföljarna, den svenska J32B Lansen och engelska J34 Hawker Hunter bidrog till denna utveckling samt blev vägledande för att senare även J35 Draken konstruerades för samma ändamål.
Hotbilden, dvs. Sovjetisk invasion med bombflyg över Östersjön på hög höjd och med kärnvapen var högst påtaglig under det kalla krigets första hälft. Därför var det viktigt att jaktflyget hade prestanda och beväpning för att kunna nå och bekämpa detta hot så tidigt och snabbt som möjligt.
Parallellt med utvecklingen av J35 Draken pågick vid Kungliga Flygförvaltningens KFF-s Robotbyrå ett intensivt utvecklingsarbete på en målsökande jaktrobot RB321, som avsågs bli den första flygburna jaktroboten för direktanfall, dvs. bekämpning av målet på mötande kurs. Utvecklingsarbetet avbröts dock och som ersättning anskaffades amerikanska IR-målsökande och senare Radar- och IR-målsökande jaktrobotar till Drakenflygplanen vilka kunde börja användas från 1963 respektive 1965.
Ersättaren till jaktflygplanet J29 Tunnan började planeras redan 1949. FV-s mål var alltså ett överljudsflygplan som var prestanda- och elektronikmässigt optimerat som vapenplattform för direktinsats med robotvapen mot snabba, stora mål på hög höjd samt vara utrustat för flygning och bekämpning i alla väder och mörker av en besättningsman. Det skulle även vara anpassat till det uppbyggda och unika svenska krigs- och vägbassystemet BAS 60samt till en markorganisation med ett utvecklat stridsledningssystem STRIL 60. Flygplan 35 DrakenAllmäntDen första prototypen av flygplan Draken, 35-1 - röd U flög den 25 oktober 1955. Totalt tillverkades 615 Saab 35 Draken i nio versioner. Av dessa utgjorde 19 st. provflygplan och 63 st. exporterades. Totalt beställde KFF 533 Saab 35, varav fem jaktversioner till FV. Dessa Drakenflygplan, J35A, B, D, F och J kom att nyttjas operativt vid 10 flygflottiljer och bestå av 24 divisioner jaktflygplan.
J35A avsågs att bli det första systemflygplanet i Draken-familjen. Så blev det dock inte på grund av att flera svenska underleverantörer av delsystem inte fick fram utvecklade utrustningar i tid före leveransen av grundflygplanen från Saab. Alternativa utrustningar, företrädesvis bestående av avancerad avionik (flygelektronik) anskaffade från andra länder, bl.a. USA fick därför integreras i J35A avioniksystem. J35A i sitt slutliga serieutförande flög för första gången i februari 1958 och mellan mars 1960 och december 1961 levererade Saab 82 st. J35A till FV. De första 59 flygplanen hade efterbrännkammare EBK-65 och kort bakkropp. De efterföljande 23 J35A hade EBK-66 och lång bakkropp. 1961 återfördes 25 J35A ur den första leveransen till Saab för ombyggnad till den tvåsitsiga skolversionen SK35C.
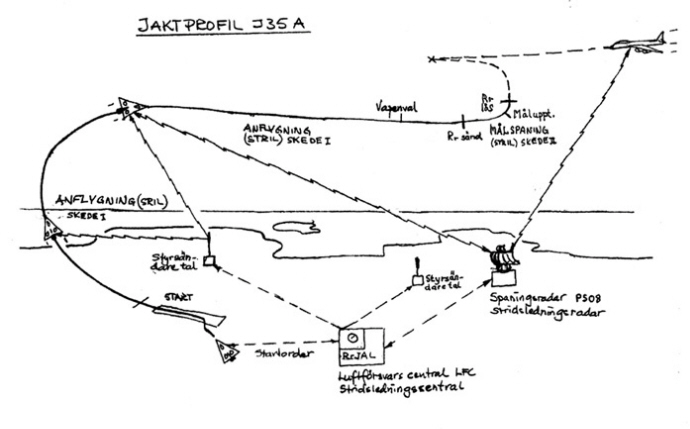
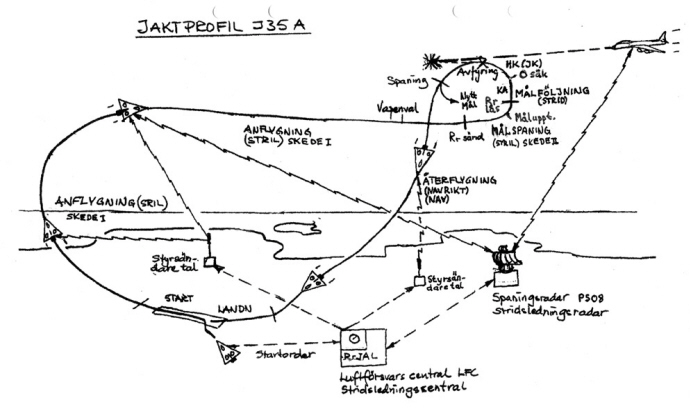
System J35 och Stridsledningssystemet STRIL 60.InledningJ35 Drakens olika versioner skapades, med hjälp av den begynnande moderna avioniken till ett integrerat System J35, (radio, olika radar och sikten samt flygdatasystem sammankopplade) som tillsammans medStridsledningssystem STRIL 60-systemet (via markradarkontakt och radiosamband) skulle samarbetade för att optimalt nyttja jaktflygplanen i alla väder och mörker i hela dess taktiska register. Denna ”resa” som jaktflygplanet med hjälp av STRIL 60 skulle göra från start till landning i ett jaktuppdrag, fick tidigt benämningen Jaktcykel (eng cycel = period). Mången personal av olika kategorier var involverade under denna cykel för att jaktuppdraget skulle kunna genomföras på ett framgångsrikt sätt. Där ingick ledningspersonal i Luftförsvarscentralen LFC, piloter i flygplanen samt flygplantekniker för service- och felavhjälpande underhåll på System J35. STRIL 60-system hade alltså en stor roll i jaktstrategin vid ledningen av jaktflygplanen fram till ett bra utgångsläge där jaktens egna målinmätningsystem MIS kunde ta över samt vid återflygningen till basen. System J35A i samarbete med STRIL 60.AllmäntFör att åskådliggöra jaktcykeln skapades en pedagogisk överblicksbild av ett stridsuppdrag från start till landning, en s k Jaktprofil för att all inblandad personal skulle få en bra uppfattning om sin egen och andras roll(er) och funktion(er) i sammanhanget. Jaktprofilen för J35A präglas av att flygplanet ej kunde ledas med hjälp av digitalt radiosamband samt ej kunde uppträda offensivt i ett första Direktanfall DA på mötande kurs mot målet, vilket KFF hade eftersträvat vid projekteringen av flygplan 35 Draken. Istället krävde beväpningen med, från USA inköpta IR-sökande jaktrobotar RB24B Sidewinder (AIM-9B) och med 30 mm automatkanoner AKAN som sekundär beväpning att målet uppsöktes mer eller mindre i dess baksektor för anfall i Hundkurva HK (RB24B) resp Jaktkurva JK (AKAN).
Jaktprofilen är, med hotbilden - kommande bombflygplan på hög höjd för ögonen - i princip representativ för alla jaktversioner av flygplan 35 Draken från året 1961 för J35A och från året 1964 för J35B och J35D samt från året 1966 för J35F och framåt en bit in på 1970-talet.
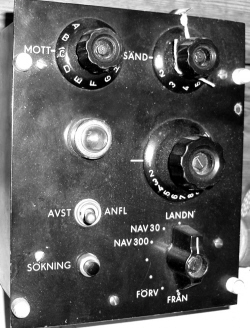
Hela detta förlopp indelades i olika flygfaser, eller s k Skeden. Dessa fick speciella namn och användes av alla inblandade personer såsom stridsledningspersonal, piloter och flygplantekniker. De användes delvis även som elektriska villkor i analogiska block- och flödesschemor och för program i datamaskiner och analoga kalkylatorer på marken respektive i flygplanen. Detta var till stor hjälp för att åskådliggöra Jaktcykeln i dess alla delar under uppdragets genomförande. I System J35A ingick ett enkelt Datasystem typ 1 DS-1 som innehöll en analog Datacentral DC-1. Systemet var i funktion under det taktiska skedet samt vid navigerings- och i landningsskedena vid ett jaktuppdrag. DS-1 avvek mycket i utförande från de datasystem som blev installerade i senare J35-versioner, på grund av att speciella indikatorer för höjd, fart och machtal och taktisk styrpresentationer ej fanns installerade i J35A. DS-1 funktioner uppfyllde ändå kraven, för att tillsammans med andra integrerade system, flygplan J35A på ett bra sätt och i alla väder och mörker dels kunde flygas och ledas till det utvalda målet samt anfalla detta med optimal vapeninriktning och dels kunde återledas samt navigera till och landa på den utvalda hemmabasen. DSC-1 ombesörjde således ett antal logiska omkopplingar som var beroende av vilket Skede i System J35A som för tillfället gällde. Styrningen av dessa skeden gjordes manuellt från Navigeringsradar PN-507 Manöverlåda ML / efter modifiering PN-594 ML av piloten på order från STRIL 60 genom talkommunikation från STRIL Radarjaktledare Rrjal. Navigeringsradar PN-595 införs från 1968.
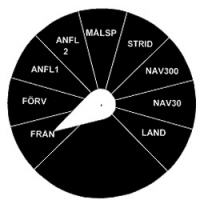
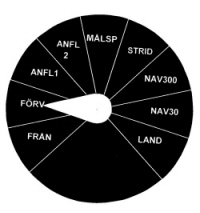
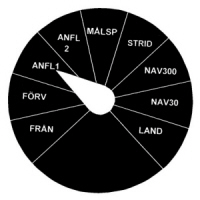
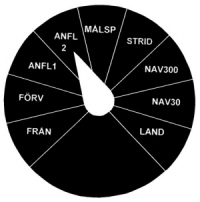
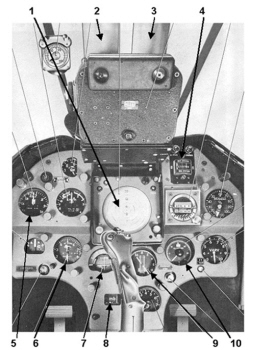
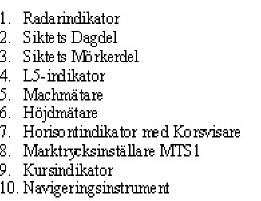
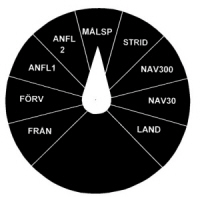
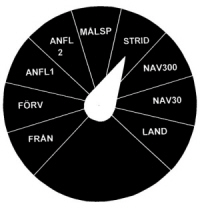
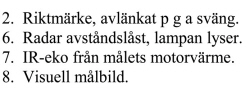
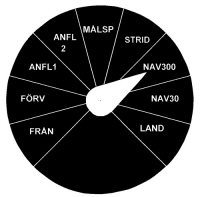
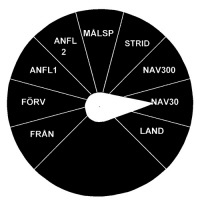
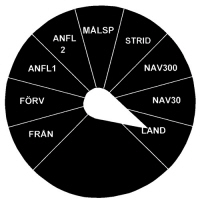
I DS-1 fanns från början även en speciell Skedesindikator monterad på flygplanets Instrumentpanel i kabinen där en visare, som styrdes från PN-507 ML eller delvis även via radiosamband från STRIL och hålla piloten underrättad om i vilket skede på uppdraget han eller STRIL valt. När DS-1 systemetvar stömsatt på marken eller under flygning och PN-507 ML funktionsväljare av något själ var ställd i läge FRÅN visade Skedesindikatorns visare på sektorn med texten FRÅN. Skedesindikatorn kom dock i J35A att endast styras från PN-507 ML och togs bort efter relativt kort tid år 1964 dels på grund av att Styrdatautrustning SD för digital överföring via radio ej installerades i flygplanet och dels på grund av bristfällig funktion som i vissa fall medförde kabelbrand i kabinen.. Skedesindikatorns olika lägen och ursprungliga skedesbenämningar omnämns dock fortsättningsvis som kuriosa i ett historiskt perspektiv.
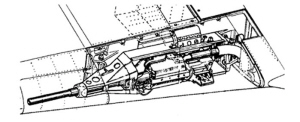
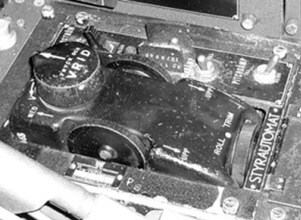
Nedan följer en kort beskrivning av händelserna i flygplanets operativa delar i dess avioniksystem i de olika Skedena. Texten inom parentes är inställda läget på de båda PN507/594 ML. Skedet BEREDSKAP (FÖRVÄRMNING)Skedet började när piloten anmälde flygplanet klart i ”Högsta beredskap”. Under detta skede var markström resp talförbindelse anslutet via flygplanets Markströmsintag från ett Markströmsaggregat MAGG eller senare ett Beredskapsaggregat BRAGG respektive via en Marktelefonanslutning MTA, båda monterade på nosställets övre del. Flygplanets Huvudströmställaren var i läge TILL men Flygmotorn var ej igång. Piloten satt i kabinen och hade vidtagit de nödvändiga åtgärderna för att snabbt kunna starta. Alla avionikanläggningar som fordrade tid för uppvärmning var automatiskt strömsatta alternativt tillslagna i sina respektive uppvärmningslägen för att direkt eller med viss fördröjning kunna tas i bruk vid startorder. Berörda system var Flyglägesinstrument FLI och Styrautomat SA, Flygradio FR, Navigeringsradar PN, Datasystem DS inklusive Luftdata LD och Datacentral DC, Siktesradar PS, Sikte S samt Igenkänningsradar IK. Ingen kylluft behövde vara ansluten. Skedet valdes i flygplanets avioniksystem av piloten med PN 507/594 ML i läge FÖRV. Skedesindikatorn visare pekade på sektorn med texten FÖRV, se ovan.
Piloten hade direkt och radiotyst kommunikationsförbindelse med Luftförsvarscentralen LFC och den egna basens Kommandocentral KC via ”Markslingan”, ett kommunikationssystem uppbyggt enbart med kabel vilket var en fördel ur avlyssnings- och/eller störningssynpunkt. Piloten kunde även höra kommunikation med andra flygplan som var anslutna till ”Slingan” samt via FR mottagare beroende på inställd frekvens. Flygplanet var fulltankat med bränsle, vid behov med Fälltankar FT samt med en beväpning enligt versionens huvudalternativ, se nedan.
Efter modifieringar i flygplanens luftsystemet kunde avioniken kylas och kabinutrymmet uppvärmas vintertid eller kylas vid varma sommardagar från en BRAGG. Med BRAGG modell B tillfördes luften i ett kombinerat el- och kylluftsanslutningsdon GT-6 som var monterat på vänster huvudlandställsben. GT-6 infördes i J35A i början på 1970-talet.
Vid ”beordrat” läge ”5 min beredskap” (eller längre tid) var piloten placerad i värn. Flygplanet var ej strömsatt. För att förhindra fördröjning av starten när startorder kom, strömsatte och startade Mekanikern avioniken genom avlyssning av ”Markslingan” och gjorde de förberedande åtgärderna samt övervakade kabinen till piloten äntrade flygplanet.
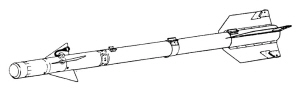
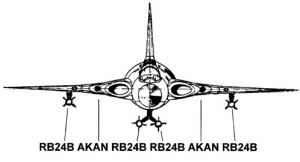
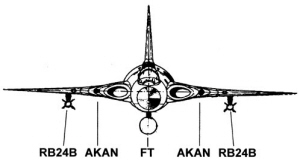
Beväpningen för J35A huvudalternativ utgjordes från 1963 av fyra RB24B för ett första och eventuellt uppföljande anfall. Anfallet genomfördes i målets baksektor. Som alternativ eller andrahandsvapen fanns två 30 mm Automatkanoner AKAN med 100 skott i respektive magasin. Alternativ yttre vapenlast om Fälltank FT var monterad var två RB24B. För attackuppdrag kunde J35A även bestyckas med 12 st. 13,5 cm Attackraketer ARAK, fördelade så att 6 st. hängdes i 3 par under vardera vingen.
Skedet START (STRIL)Skedet började när startorder gavs från LFC av Trådjaktledaren, Tråjal till jaktflygplanens piloter i Beredskap. Beslutet hade tagits av Jaktledaren, Jal på grundval av att fiendemålekon uppträtt på spaningsradarns indikator PPI. Piloten startar flygmotorn och när huvudgeneratorn kopplades in efter 10-15 sek drar mekanikern bort markströmskällans och trådslingans kontakter. På PN-507 ML ställde piloten in vredet på ett av det första omärkta läget närmast läge FÖRV i avvaktan på att nästa skede skulle inträda. Skedesindikatorn visade när detta skedde på sektorn ANFL 1, se bild nedan. När PN-59 infördes hade, som tidigare nämnts Skedesindikatorn utgått och på PN-594 ML ställdes läge STRIL in.
Under utkörning till start eller i beredskapsvärnet i anslutning till startbanan vidtog piloten åtgärder för mottagande av muntliga styrdata från STRIL 60 med att ställa in anbefalld STRIL-radiokanal på FR ML samt startade IK och ställde dess Kodväljaren i anbefallt läge. Han startade också radarfunktionerna på Radarpanelen RP och siktes- och vapenfunktionerna och på Vapenpanelen VP som senare behövdes under anflygningsskedet. Vid mörker ställer piloten på VP Mörkerenheten (IR-kameran) ME i läge TILL samt siktesbildens ljusstyrka och symboler till lämplig nivå.
Piloten drar på motorn och tänder EBK och lättar efter ca 20-30 sek och en knapp km på startbanan och med successivt ökande fart börjar svänga och stiga mot av Rrjal beordrad kurs och flyghöjd med hjälp av Fart- och Machmätarna respektive Kursindikatorn och Höjdmätaren. Vid infällning av landställen kopplas markspärrarna för beväpningssystemets elkretsar bort och vid mörker och om ME slagits TILL öppnar sig ME bländare.
J35A med robotar RB24B och Fälltank FT ut ur beredskapsvärn med motorpådrag.
Skedet ANFLYGNING (STRIL) Skede IDetta skede startar när flygplanet lättat. När J35A togs i operativ drift 1960 uppdelades skedet i två delskeden, ANFL 1 och ANFL 2 vilket framgick av Skedesindikatorn. Omställningen mellan ANFL 1 och ANFL 2 i flygplanets datacentral DC1 avsågs då ske med signalöverföring via radio frånSTRIL 60. När detta skulle ske går ej att utröna på grund av brist på historiska dokument.
När Rrjal identifierade jaktflygplanet på sin radarindikator PPI och fått rätt IK-svar (flygplanets anropssignal avkodats började han med hjälp av radarekonas rörelser på PPI manuellt beräkna flygbanan för optimal flygrutt till utgångsläge för den anfallstyp som gällde för J35A huvudalternativ med RB24. Från 1963-64 kunde Rrjal istället beordra mål- och jaktföljning med STRIL-s avancerade stridsledningsdator vilken omgående till Rrjal-s PPI återmatade den beräknade flygbanan till ovannämnda utgångsläge.
Rrjal överförde dessa data till jaktpiloten via flygradion med talinformationer. I data ingick målets kurs, höjd och fart samt den kurs jakten skulle flyga med samt till vilken höjd flygningen skulle ske. Piloten ställde vid behov in Flygkursindex FKI med kursinställarvredet på Kursindikatorn KI på instrumentpanelen, se nedan och styrde in flygplanet till beordrad kurs samt steg med optimal fart mot beordrad höjd. För att underlätta den fortsatta taktiska flygningen kopplade piloten in STYRNING (Autopilot-funktionen) på SA Manöverpanel MP varvid styrningen av flygplanet kunde ske med en Svängratt och en Upp/Ned-ratt på SA Manöverlåda ML.
Vid anfall med RB24B vars målsökare var anpassad för höga temperaturer i målets baksektor ledde Rrjal till utgångsläge för Kurvanfall KA. Alternativ profil var Jaktkurva JK vid anfall med AKAN. Förfarandet benämndes Kurvledning KL. Skedet var ganska långt tidsmässigt samt med fåordig kommunikation på grund av risken för avlyssning och utstörning. Endast korta och på förhand överenskommet ordval användes. En bakåtriktad antenn kunde inkopplas till flygradions mottagare vilket minimerade påverkan från fiendestörning. KL medförde i detta flygfall att jaktflygplanet leddes i en parallellbana med målets på kontrakurs 180 grader och avskilt i avstånd ca 30-40 km.
Jakprofil System J35A under Skede START och SKEDE I och SKEDE II för Kurvledning KL.
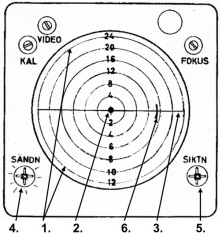
All information till piloten för taktisk flygning och från STRIL 60 var koncentrerad runt radarindikatorn på instrumentpanelen. Piloten styrde flygplanet efter Rrjal-s kommandon och styrinformationer för KL vilket ledde jaktflygplanet till utgångsläge för Kurvanfall KA. Skedet varade tidsmässigt olika länge beroende på hur fort jaktflygplanet kunde stiga till lämplig höjd och avstånd för övergång till nästa skede i jaktcykeln. Vid höghöjdsmål skedde stigningen i etapper där jaktflygplanet planade ut på ca 10 km meters höjd där atmosfärstemperaturen var lägst och gav bästa dragkraftstillskottet för att öka farten och stiga mot högre målhöjder. Under slutet av skedet gjorde piloten Vapenval på VP samt förinställde PS-funktioner på Radargreppet RG för spaning i 60-gr spaningsprogram och avståndsområde 24 Km.
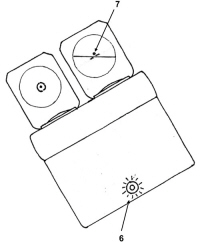
Skede MÅLSPANING (STRIL) Skede IISkedets starttidpunkten meddelades från STRIL vid ca 30 km till målet och piloten startade på RG radarsändaren Rr-sänd. Rrjal meddelade till piloten att påbörja ”blandad” målspaning. Detta utfördes dels med de egna ögonen, populärt kallad "PS-00” och / eller, vid dålig sikt, i moln eller i mörker med hjälp av presentationen på PS indikator dock tidigast från 24 km till målet på grund av radarn mätområdesbegränsning. Radarn spanade i ett roterande spiralt svepande program rakt fram i en variabel kon mellan 6-60 grader med logisk läges- och avståndspresentation av målekot på en s k I-indikator samt även en reglerbar avståndslåsningsmarkör. När Skede II började var jaktens flygbana parallell med målet och på mer eller mindre kontrakurs. Under skedet stöttades piloten fortlöpande via radio med STRIL-information från Rrjal. Skedet avslutades efter insväng med jakten till utgångsläge för KA 90 grader tvärs målbanan på ca 20 km avstånd. När piloten identifierat målet visuellt eller på PS indikator började han att målfölja och tog själv över ”ledningen” med orden ”Jag leder” till Rrjal i LFC. Skedesindikatorns visareskulle visa på fältet MÅLSP och ha styrts via kretsar i DC-1 med radioöverföring från STRIL
Skedet MÅLFÖLJNING (STRID)Detta skede inleddes när piloten påbörjar KA, visuellt eller på egen PS-indikatorn med målet på 20 km avstånd ca 30 grader ut till vänster eller höger beroende på anfallsriktning. Skedet valdes med läge STRIDpå PN ML för viss omställning i DC-1 varvid det radarinmätta målavstånd visades på bl.a PN Avståndsindikator. Denna informationen valde piloten ofta bort på grund av omständlig omräkning av presentationsvärdet. På Skedesindikatorn pekade visaren på sektorn STRID, se ovan.
Hela Jaktprofilen för System J35A under samtliga Skeden för KL, KA och HK-anfall och Återledning
Anfall med RB24BKA startade alltså med målet ca 20-30 grader ut i sida och på 20 km avstånd samt med fartförhållandet jakt / mål på 1 / 1,2. Målföljning via PS indikator gjordes i antennens 60 grader program, en kon med centrum pekande i samma pekriktning som S riktmärken och robotens Målsökare MS-centrum. Detta förfarande utfördes så länge som möjligt under skedet för att minimera konstant radarbelysning och därmed vilseleda målets eventuella radarvarnare.
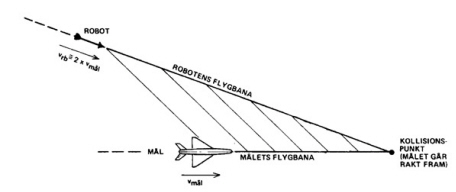
Vid målavstånd 12-8 km, beroende på fartförhållandet började insvängen (kurvan) mot målbanan med ca 10 grader förhållning mot ett läge 2-3 km bakom målet. Piloten valde på RG radarmätområdet 12 km för noggrannare avståndsinformation. Vid anfall med RB24 krävdes att robotens ”rakt fram”- fixerade MS pekade inom 4 grader mot målets varma delar (motorer) för att få MS-signal från IR-strålningen. Detta indikerades med att en aktiv ”Robotton” hördes i pilotens hörlurar. Ljudets karaktär gav även information om noggrannheten i inriktningen. Ljudnivån kunde vid behov regleras med en ratt på RG och eventuell radiotrafik eller radiostörning kunde helt dämpas med tryckknapp UK-dämpning på Styrspaken SS, se nedan. Denna flygbana, som liknade en hunds visuella förföljande av ett byte kallades för Hundkurve HK-anfall. HK-anfallet måste därför ske i sväng varför flygplanet hade en viss rollvinkel samt även ske, som tidigare nämnts inom ca 30 grader i målets baksektor från målets flygriktning på grund av att RB24 IR-detektors våglängdsfönster (frekvensområde) var anpassat för relativt höga temperaturer.
Ett typiskt HK-anfall.
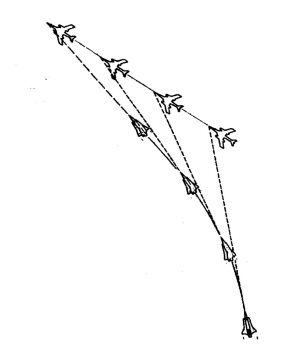
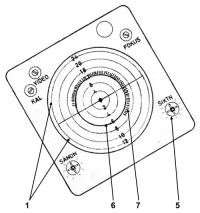
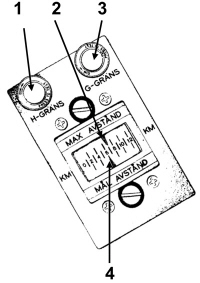
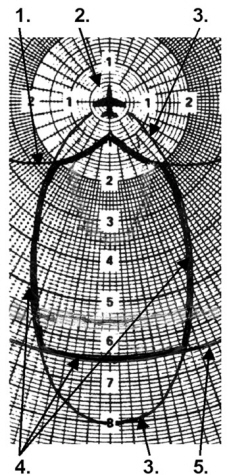
För att erhålla skjutgränsberäkning och presentation på siktets Skjutgränsberäknare SGB-s indikator L5 valde piloten sedan radarns Siktningsprogram (6 grader) för övergång till HK och en noggrannare inriktning av flygplanet via radarindikatorn. Han etablerade därefter avståndslåsning Rr-lås på målekot för information till siktets SGB varefter anfallet fortlöpte med en för fartförhållandet anpassad bankningsvinkel (rollvinkel), i detta fall ca 30 grader vänster. Siktets SGB beräknade kontinuerligt RB24B mekaniska skjutgränser för flygfallet och presenterade dessa på L5-indikator. Med vapenvalet ROBOT presenterades HK-anfall även på siktets riktmärken och alternativt kunde inriktning i mörker ske genom målets IR-signal via siktets ME presenterades i siktets mörkerdel. I det senare fallet underlättades även själva flygningen av den Konsthorisont KH som speglade FLI Horisontindikator HI i både tipp- och rolled. När siktets skjutgränsberäkning (vid radaravståndföljning) för RB24B flygegenskaper passerade yttre skjutgränsen, kopplade piloten bort STYRNING på SA MP om inte detta gjorts tidigare på grund av det taktiska läget och osäkrade Osäk avfyringskretsarna med avfyringsbygeln överst på SS samt styrde flygplanet vidare med denne under slutfasen av anfallet.
Styrspaken SS med manöverorgan och olika strömställarna.
Detta läge inträffar vid ca 6.5 km målavstånd med en jaktfart på M 1.1 på höjder över 10 km mot mål med en målfart på M 0.85, vilken var typiskt för ett sovjetiska bombflygplan av typ Tu-16 BADGER.
Vid säker signal i pilotens hörlurar från RB24B MS, som inträffade på betydligt lägre avstånd vid ovannämnda måltyp än den flygmekaniska gränsen, avfyrades roboten Avfyring av piloten på ca 6 - 5 km målavstånd när yttre skjutgränsen väl passerats.
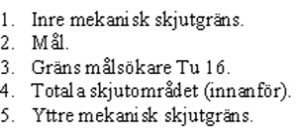
RB24B accelererade när den lämnade flygplanet till ca M 3.0 (inkl flygplanets fart) och styrde snabbt in till s k syftbäringskurs mot en kollisionspunkt med målet. Efter 14-16 sek och ca 9 km robotgångsträcka nådde roboten målet och vid anslag i detta eller vid signal från RB IR-känsliga ZON-rörsutlösning vid nära målpassage detonerade sprängladdningen vilken spred ett antal mindre metalldelar åt alla håll. Alternativ metod vidKA- anfall med efterföljande HK-anfall kunde även ske med spanande radarantenn, s k I-skopsinflygning och/eller vid mörker med ME-signal i siktets mörkerdel eller med visuell inriktning med hjälp av fast optiskt riktmärke i siktets mörker- eller dagdel. I dessa anfallstyper gick piloten miste om värdefull skjutgränsinformation från siktets SGB-s L-5-indikator och fick själv avgöra med tumregler när optimala skjutvillkor för robotens flygmekaniska krav var uppfyllda.
Anfall med AKANEfterföljande anfall med AKAN kunde utföras direkt efter HK med robot eller beordras av Rrjal mot ett annat lämpliga mål som fanns tillgängliga. Upptakten för det senare fallet skedde via talmeddelande från Rrjal som åter startade ”Skede I” följt av ”Skede II” med alla nödvändiga order som vid ovanbeskrivna KL. Anfallet genomgick samma procedur som med RB24B, d v s KL följt av ett KA som leddes av Rrjal med talmeddelanden fram till att piloten fick radarkontakt och senare visuell kontakt med målet. Där tar piloten över ”ledningen” och inriktningen fortsätter via optiska siktets dagdel eller vid mörker via dess mörkerdel och med radarinmätt avståndsinformation till siktet för rätt framförhållning i jaktkurvan.
Vid JK-anfall och med avståndsdata från radarföljning var alltid skjutvillkor för AKAN-avfyrning uppfyllt mellan 700 m – 300 m. Bäst träffsannolikhet erhölls på korta avstånd på grund av AKAN konstruktion. Vid icke radarföljning beräknades förhållningen för ett fast målavståndsvärde på 500 m varvid piloten fick göra egen avståndsbedömning och framförhållning. Vid anfall i mörker riktades flygplanet med hjälp av ett mörkerriktmärket som var slavat från optiska riktmärket mot den av ME registrerade IR signalen från målet i siktets mörkerdel. Vid JK med radaravståndsföljning erhöll dessutom piloten ”tonsignaler” med olika intensitet och frekvens i hörlurarna vid avståndsintervallerna 1500 m, 700 m och 300 m. Jaktens läge vid det kortaste avståndet medförde även kollisionsrisk med målet och utgjorde så kallad ”kollisionsvarning”. Vid mörkerinriktning indikerades detta även optiskt med upprandning i siktets mörkerdel. Efter att piloten osäkrat systemetOsäk gjordes avfyring varvid AKAN- projektilerna lämnade kanonen med 20 st /sek varefter dess sprängladdningar detonerade vid anslag i målet.
Skedet ÅTERFLYGNING(NAV 300/30 alt NAVRIKT / NAV 400/40)Detta skede bestod av två faser. Fas 1 började med muntligt Kommando ”landa” från Rrjal. Samtidigt uppgav Rrjal information om avståndet till landningsbasen och återflygningskurs samt anvisning om lämplig återflygningshöjd. Piloten ställer då vid behov in återflygningskursen på FKI på KI samt kopplar åter in STYRNING på SA MP och svänger in till återflygningskursen och mot rekommenderad återflygningshöjd med hjälp av styrrattarna på SA ML.
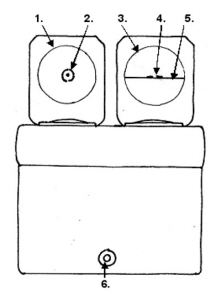
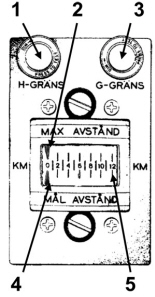
Fas 2 började när flygplanet befinner sig inom radaravstånd till landningsbasens navigeringsfyr. Inför denna fas hade piloten valt NAV 300 samt rätt mottagar- och sändarfrekvenser på PN-507 ML för anbefalld navigeringsfyr. Detta medförde att frågesändning till fyren startade och när utrustningen i flygplanet ”låste” på fyren presenterades avståndet och riktningsangivelse till denne på PN-50 Navigeringsinstrument NI, se nedan.
Efter modifiering till PN-595 valde piloten i stället ett läge NAVRIKT på PN-594 ML och koden och frekvensen för anbefalld navigeringsfyr. Härvid erhölls endast riktningen t PN-50 NI till vald navigeringsfyr utan att flygplanet sände frågor, det vill säga uppträdde radartyst. För att även erhållande av avståndet till fyren valdes sedan NAV 400 på PN-594 ML när flygplanet kom inom detta område. Pilotens val av NAV30 på PN-507 ML eller efter modifiering NAV40 på PN-594 ML gav sedan noggrannare avståndsangivelse. På Skedesindikatorn pekade visaren på resp sektorer NAV 300 och NAV 30, se nedan.
Skede LANDNING(LANDN alt LANDN 40/BARBRO)Skedet börja när flygplanet befinner sig inom radaravstånd till landningsbasens landningsfyr som var placerad i slutet av landningsbanan och något vid sidan om. Piloten valde läge LANDN på PN-507 ML eller efter modifiering läge LANDN 40 på PN-594 ML. Vid eventuellt fel på glidbanan i DS-1 valdes i stället BARBRO varvid höjdvisaren i HI parkerade utom synhåll. Landningsbanans kurs ställdes in på FKI på KI och det aktuella marktrycket vid landningsbasen på DS-1 Marktrycksinställare MTS1. Detta tryck fick piloten via radio från flygledningen vid landningsbasen. På Skedesindikatorn pekade visaren på sektor LANDN, se ovan.
Korsvisarens horisontella Höjdvisare i FLI Horisontindikator visade den i DC-1 beräknade planébanan på ca 3 grader som ledde flygplanet till sättpunkten, ca 100 m in på basens landningsbana och dess vertikala Sidvisare visade flygplanets sidläget i förhållande till landningsbanans inkurs, benämnd QFU. Denna kurs (QFU-EL) representerade en ca 4 graders avvikande ”kurs” i förhållande till den geografiska bankursen (QFU-GEO) eftersom landningsfyren stod vid sidan av landningsbanan. QFU-EL var inställd så att den korsade QFU-GEO ca 2 km före banans början för att ge piloten optimal möjlighet till kursändring för säker landning på banan vid låg molnbas som ej fick vara lägre än 100 meter under fredstid. Piloten landade sedan flygplanet på banan och bromsade med hjälp av Bromsskärm för att minimera rullsträckan samt körde in i värn för nästa skede.
J35A landar med bromsskärm efter uppdrag.
Skede ”KLARGÖRING”.Skedet börjar när piloten får order om att kupera motorn efter det att MAGG- eller senare BRAGG samt Marktelefon anslutits till flygplanets markanslutningar och det matades med elkraft samt talförbindelse via ”slingan” med LFC upprättats. Klargöring för nytt jaktuppdrag var normalt avklarat på mindre än 10 minuter ofta med piloten kvar i kabinen (om inget tekniskt fel behövde åtgärdas eller besättningsbyte skulle ske) varvid Jaktcykeln var sluten när flygplanet av chefen i KC ånyo anmäldes flygklart med fulla bränsletankar och monterad beväpning och en nytt förlopp kunde börja igen. Sammanfattning.Ett jaktuppdrag med J35A kunde alltså, när alla länkar i Jaktprofilen fungerade som de skulle genomföras på ett planerat sätt dock med talkommunikation vilket i viss mån kunde avlyssnas och delvis röja uppdragets art och profil. Trots detta kunde piloten komma till ett utgångsläge för anfall mot och bekämpning av det utvalda målet samt att återflyga till och landa på en lämplig flygbas.
Detta System J35A utvecklades senare i J35B/D och ytterligare något i J35F med hjälp av dataöverföring av Styrdata som medförde att inte ett enda ord sades mellan markorganisationen och jaktflygplanet och ändå fick piloten alla nödvändiga data och direktiv i alla delar av uppdraget för anfall mot och bekämpning av det utvalda målet samt att återflyga till och landa på en lämplig flygbas.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||