![]()
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Datamultiplexutrustning TM-10A och TM-10B M3981-010011 och M3981-010021Tillverkare Selenia, Italien |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
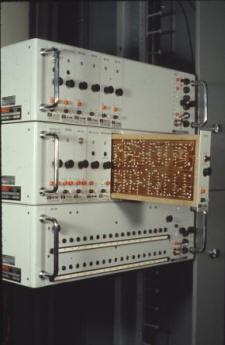
TM-10B |
BakgrundI syfte att öka tillgängligheten för obemannade anläggningar i Försvarets Fasta Radiolänknät FFRL, utfördes ett begränsat prov med överföring av larmsignaler från utrustningar. Signalerna överfördes från relästationer till knutstationer i FFRL. Presentation skedde på glimlamptablå.
TM-10A var en datamultiplexutrustning, som genom tidsdelning (tidsmultiplex) överförde en larmkanal (= en bit) i taget av 16 möjliga. Förutom de 16 larmbitarna överfördes synkroniserings- och kontrollbitar, totalt 32 bitar per meddelande (ett "varv"). Datahastigheten var 600 bit/s vilket medgav att varje larmsignal uppdaterades var 54:e ms. Överföring över ett radiolänkstråk skedde med hjälp av FSK-modem i radiolänkars tjänstekanaler. Erfarenheterna från försöken med TM-10A togs tillvara genom att en B-variant,
TM-10B anskaffades med högre kapacitet (32 kanaler). Denna variant användes endast i fjärrövervakningssystemet för PS-15.
Utrustningen var helt digitaliserad, baserad på grindar och vippor uppbyggda av diskreta komponenter (bl.a. transistorer och dioder) på ett litet kretskort, vilket ingjutits i plast, en slags föregångare till integrerade kretsar. TM-10A byggdes inte ut seriemässigt, men principen anammades i kommande övervakningssystem.
Uppbyggd av kortkassetter som placerades i en 19” hylla för stativmontage.
Utdrag ur
Systembeskrivning TM-10A
|
|
Antal kanaler |
Yttre |
16 T/F-kanaler |
|
|
Inre |
4 kanaler för kontrollkod 2 kanaler för Start/stoppuls |
|
Insignal /S |
Signal |
Kontaktslutning till jord eller -1 till +12 volt |
|
|
Icke signal |
Öppen kontakt eller -12 till -8 volt |
|
Utsignal /M |
|
Normalt jordslutning via transistor (ev. relä) |
|
Avsökningshastighet |
|
100 Baud dvs. t=220 ms (50 Baud) |
|
Strömförsörjning |
|
Nätspänning 220 volt 50 Hz +10 -15% resp. ±3% |
|
Effektförbrukning |
|
Sändare 3W Mottagare 6W |
|
Dimensioner |
Vikt |
Sändare 9 kg (beroende på bestyckning) Mottagare 10 kg (beroende på bestyckning) |
|
|
Mått |
Sändare och mottagare Bredd x Höjd 438 x 132 mm |
|
|
|
Djup 165 + 115 mm |
|
Temperaturområde |
|
0 – 500C |
Utdrag ur Systembeskrivning TM-10B
KFF-L51131 (1966)
Allmänt
Datamultiplexutrustningen består av en sändare och en mottagare och eventuellt en reläenhet. Utrustningen skall användas för transmission av övervakningssignaler i form av jordslutningar vid RL- och kabelförbindelser.
Utrustningen kan överföra 32 kanaler. Sändaren söker av de 32 kanalingångarna och registrerar eventuella jordslutningar som omvandlas till ett seriemeddelande. Mottagaren tar emot seriemeddelandet, omvandlar och lämnar ut informationen i parallellform till ett mellanminne. Förutsatt att synkronisering och kontrollkod är korrekta överförs informationen till ett slutminne som presenterar meddelandet genom jordslutningar.
TM-10B kan användas tillsammans med andra datamultiplexutrustningar. Det går att ta ut synksignaler för att synkronisera yttre system ingående i anläggningen.
Tekniska data
|
Antal kanaler |
Yttre |
32 T/F-kanaler |
|
|
Inre |
8 (4 + 4) kanaler för kontrollkod 4 (2 + 2) kanaler för Start/stoppuls |
|
Insignal /S |
Signal |
Kontaktslutning till jord eller -1 till +12 volt |
|
|
Icke signal |
Öppen kontakt eller -12 till -8 volt |
|
Utsignal /M |
|
Normalt jordslutning via transistor (ev. relä) |
|
Avsökningshastighet |
|
100 Baud dvs. t=440 ms 50 Baud dvs. t=220 ms |
|
Strömförsörjning |
|
Nätspänning 220 volt 50 Hz +10 -15% resp. ±3% |
|
Effektförbrukning |
|
Sändare 4W Mottagare 8W |
|
Dimensioner |
Vikt |
Sändare 9 kg (beroende på bestyckning) Mottagare 10 kg (beroende på bestyckning) |
|
|
Mått |
Sändare och mottagare Bredd x Höjd 438 x 132 mm |
|
|
|
Djup 165 + 115 mm |
|
Temperaturområde |
|
0 – 500C |
Drifterfarenheter (Bengt Eliasson)
TM-10 blev kortlivad. På kretskorten fanns moduler mindre än en liten tändsticksask. Inuti dessa var komponenter ingjutna. Massan härdade med tiden och krossade komponenterna efter några år.
Sammanställt av Roland Persson
Senast uppdaterad 2013-12-20
Källor:
Utdrag ur Systembeskrivning TM-10A KFF-L50998 (1966)
Utdrag ur Systembeskrivning TM-10B KFF-L51131 (1966)
Uppgifter från FHT
Uppgifter från Bengt Eliasson
Läs mer:
För den som vill veta mer om hur fjärrövervakningssystemen i Försvarets
Telenät, FTN, utvecklats från 1965 till 2008 rekommenderas
FHT-dokumentet:
Teknisk övervakning inom försvaret. Skrivet av Ingemar Engdahl