|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
TELETESTRIGG för FLYGPLAN J35B/D/F/J
Telesystem (avioniksystem) under tidsperioden 1964 - 1999 Uppdaterat 2022-04-05
BAKGRUNDUnder perioden 1945 till 1970 utvecklades de flygburna teleutrustningarna i Flygvapnets flygplan till att omfatta de flesta av flygplanets funktioner. För att upprätthålla en godtagbar tillgänglighet för flygplanen skärptes kraven på testtekniken för att snabbt kunna verifiera rapporterade fel. För Flygplan 35 Draken förverkligades detta genom samla all testutrustning i en Servicebuss. För anslutning infördes ett centralt testpunktuttag i flygplanet .
För att bland annat att förenkla utbildningen av operatörer av manuella testsystem i flygplanen byggdes även flygplanlika Teletestriggar.
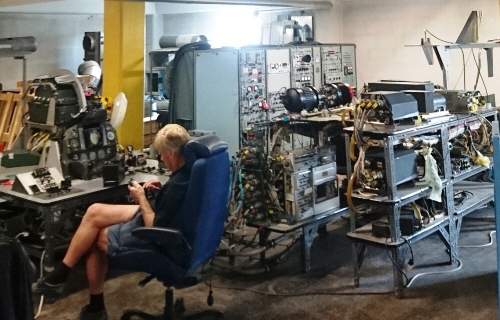
Artikeln beskriver den teletestrigg för J35J Draken som på uppdrag av Flygvapenmuseum under 2017 - 2019 monterades upp och driftsattes av personal från Robothistoriska Föreningen i en lokal i samma hus som Arkivcentrum i Arboga. Testriggen alla funktioner filmades av Flygvapenmuseum 2019. Avsikten var att dokumentera testriggen för framtiden innan slutlig avveckling. Information om filmen och länk till filmen, som är 35 minuter lång, finns här.
InnehållOm Teletestriggarnas UPPGIFT och vidare ÖDEN Om Teletestriggarnas UPPBYGGNAD SYSTEMPROVUTRUSTNINGEN/SERVICEBUSSEN I Flygplan J35J INGÅENDE SYSTEM och APPARATERI Teletestriggen J35J INGÅENDE SYSTEM OCH APPARATER Flygradiosystem betecknat FR-28/21 Flyglägesinstrumentsystemen FLI 27/FLI-35 Navigeringssystemets radar PN-594 Igenkänningsradarsystem PN-793 Övrig provutrustning i servicebussen
HISTORIK.AllmäntUnder perioden 1945 till 1970 utvecklades de flygburna teleutrustningarna, eller som det numera kallas avionikutrustningar, i Flygvapnet FV-s flygplan, till att omfatta de flesta av flygplanets funktioner. Detta blev möjligt genom att steg för steg utnyttja den tekniska utvecklingen inom elektronikområdet.
För att upprätthålla en godtagbar tillgänglighet
för flygplanen skärptes kraven på testtekniken för att snabbt verifiera
rapporterade fel, lokalisera felaktiga utbytesenheter och verifiera aktuella
funktioner efter åtgärd.
En Servicebuss 35A modell Ford Transit installerades med de Provutrustningar som erfordrades för provning av respektive system. De anslöts till flygplanets olika system med speciella kablage i därför anpassade testuttag och antenner. En Operatör, Op 2, i flygplanets kabin manövrerade strömställare och reglage samt läste av instrument eller akustik efter direktiv enligt gällande underhållsföreskrifter. En Op 1 i servicebussen eller utanför flygplanet manövrerade i sin tur testutrustningarna för leverans av stimuli till flygplanets berörda system. Testerna utfördes vid regelbundna service eller tillsyn.
Servicebuss 405F/J och J35J
Fordservicebussen ersattes efter några år med en Mercedesbuss 405 A som med i stort samma installation. Mercedesbussen blev sedan urtyp för övriga versioner av flygplan 35. Servicebuss 35B/D och F/J anslöts dock som tänkt var till flygplanet via 2x200-poliga skarvdon i in/uttag under en lucka i flygplanets ryggås. Samtliga Servicebussar installerades vid Centrala Verkstaden i Arboga CVA
Dessa omvälvande beslut krävde i sin tur att flygplanlika Teletestriggar byggdes dels för att förenkla utbildningen av operatörer av manuella testsystem i flygplan 35, dels för att bistå flygplantillverkaren Svenska Aeroplan AB SAAB vid installation och utvecklingen av flygplanets avionikutrustning och dels för att enkelt testa Servicebussarna vid återkommande översyner vid CVA. Ingen speciell Teletestrigg byggdes dock för J35A, varvid alla systemutprovningar och utbildningar utfördes i kompletta flygplan.
Testrigg J35J komplett med Servicebuss 405J:s testpaneler
Kompletta Teletestriggar för 35B/D och för 35F1/2 byggdes upp av SAAB på uppdrag av KFF-F/U Flygplans- och Underhållsavdelning (senare Försvarets Materielverk FMV-F/U). De tillverkades i tre exemplar vardera och kom att placeras vid SAAB, vid CVA samt vid Flygflottiljerna F18 i Tullinge vad gällde 35B/D från åren 1963-64 och vid F13 i Norrköping vad gällde 35F1/2 från åren 1966-67. För utbildningen i synnerhet var det också viktigt att Servicebussens alla Provutrustningar fanns att ansluta till Teletestriggen varför en komplett Bussrack för dessa konstruerades och ställdes i anslutning till riggen.
Om Teletestriggarnas UPPGIFT och vidare ÖDEN.Vid SAAB användes testriggarna 35B/D och 35F1/2 som komplement i samband med utprovnings- och införandetiden av flygplan 35 till FV för att kunna användas som alternativ vid utprovning, test och felsökning av apparater och system samt systemmodifieringar under denna tid. Den användes sedan fram till 1967 -70 för 35B/D respektive fram till 1972 – 73 för 35F1/2. Därefter demonterades riggen för 35B/D en bit in på 1970-talet medan riggen för 35F1/2 blev kvar fram till 1974-75 då införandet av ändringar i beväpningssystemet, i kommunikationssystemet och i styrautomaten genomförts. Därefter avvecklades även testriggen för 35F1/2.
Vid CVA installerades teletestriggarna, dels för ändamålet att kunna sluttesta den specifika Servicebussen 405B/D och 405F för flygplan 35B/D och 35F1/2 efter det den genomgått sin regelbundna översyn, dels testa och fellokalisera svårdiagnostiserade fel i teleapparater eller efter modifieringar i apparater eller systemändringar. Testriggen för 35B/D avvecklades 1971-73. Teletestriggen för 35F1/2 kom fortsättningsvis att nyttjas vid systemkontroller och modifieringar i apparater och system efter det testriggen 35F1/2 avvecklades vid SAAB. Exempelvis kunde 1976 prov i CVA-riggen ett allvarligt förbiseende upptäckas som påverkade systemet för robotval negativt efter enkelskottsmodifiering för RB28 vid SAAB uppdagas och åtgärdas snabbt. Testriggen för 35F1/2 exporterades 1985 till Finska FV och placerades i Halli, den centrala verkstaden för 35SF i Finland.
Vid F18 och F13 Här kom teletestriggarna att användas för central utbildning av i första hand de flygtekniker ur de förband som fick de olika flygplanversionerna. För 35B var det F18 och F10 och för 35D var det F3, F10, F4 och F21. För 35F1/2 gällde F13, F1, F3, F10 och F12 och senare även F16 och F17. Riggarna byggdes och arrangerades på samma sätt som vid SAAB och CVA. 1972 överfördes testriggarna till de nyuppsatta Flygvapnets Tekniska Skola FTS vid F14 i Halmstad.
Vid F14 bildades Flygvapnets Halmstadskolor 1972 varvid FV Teletekniska Skola FTTS vid F18 och Flygvapnets Centrala Skolor i Västerås FCS överfördes dit. Där upprättades Flygvapnets Tekniska Skolor FTS för fortsatt central utbildning på telesystemen i flygplan 35. Teletestriggarna för 35B/D och 35F1/2 byggdes upp på nytt tillsammans med servicebussrackens provutrustning i skolans lokaler och verkade för många utbildningstimmar och elever från i stort sett alla förband som hade flygplan 35. Testriggen för 35B/D(E) nedmonterades efter att flygplan 35D(E) avvecklades ur FV 1984-85 och för 35F1/2 överfördes till F10 andra halvan av 1990-talet där den modifierades till 35 J-standard.
Vid F10 Denna flottilj blev ensam i FV att använda versionen 35J varför FV-ledningen ansåg att Teletestriggen på F14 flyttades till F10. Där byggdes den upp samt modifierades till testrigg 35J och placerades sannolikt i F10 Instruktionsverkstad. När flygning med 35J upphörde 1999 monterades den sista fungerande teletestriggen i FV ned och lades i malpåse. Efter ett antal år överfördes den nedmonterade riggen till Flygvapenmuseet FVM.
Vid Halli i Finland 1985 beställde Finska FV ytterligare tjugo flygplan 35F1 från Svenska FV. Samtidigt tilläts de att köpa den teletestrigg 35F1/2 som skulle avvecklas vid CVA. Efter leverans modifierades den till 35SF-standard och användes vid utbildning av flygtekniker samt vid prov av systemmodifieringar och felsökning. I flygplanköpet ingick även taktiska modifieringar av konfidentiell natur utan att utbildning av piloter och markpersonal genomfördes. 1991 hemställde Finska FV hos FMV (tidigare KFF) om att få information till piloterna och utbildning av markpersonalen avseende dessa modifieringar. En delegation ur FFV (tidigare CVA) genomförde detta varvid testriggen i Halli kom väl till pass vid de tekniska genomgångarna. Den är nu även där avvecklad enligt information från välunderrättad källa.
I Österrike Ingen teletestrigg 35B/D överfördes vid exporten av 35DÖ.
Vid FVM Testrigg 35 J härbärgeras i nedplockat skick efter överföring från F10.
Vid Robotmuseet i Arboga Testriggen monterades sent hösten 2017. Riggen kom under 2018 och första halvan av 2019 att kompletteras med lån av materiel från olika håll för igångsättning av så många system som det går.
Om Teletestriggarnas UPPBYGGNADFör flygplan 35B/D(E)Teletestriggen var uppbyggd runt ett ordinarie flygplankablage med anslutna apparater bekvämt placerade på bord för lätt åtkomlighet vid bland annat test och utbildning. Kablaget borgade för rätta impedanser och kablagelängder vilket var viktigt för samstämmighet gentemot en verklig flygplaninstallation. Även nödvändig hydraul- och kylluftsinstallation var typriktigt uppbyggt liksom övertryck och elkraftförsörjningen för driften av alla system. Plattformen bestod av tre separata bord vilka speglade flygplanets uppbyggnad kablagemässigt på ett bra sätt. Rör för hydraulik, kylning och tryckluft monterades på samma sätt. Kablaget var draget både på över- och undersidan av borden och för att enkelt kunna dela borden vid transport eller förflyttning kunde borden skiljdes åt med ett antal skarvdon och röranslutningar.
Plattformen bestod alltså av tre separata bord vilka speglade flygplanets uppbyggnad kablagemässigt på ett bra sätt. Rör för hydraulik, kylning och tryckluft monterades på samma sätt. Kablaget var draget både på över- och undersidan borden och för att enkelt kunna dela borden vid transport eller förflyttning kunde borden skiljdes åt med ett antal skarvdon och röranslutningar. Delningen var gjord efter flygplanets konstruktion så att främre bordet utgjord nosutrymmet och kabinen som skilde sig elmässigt från övriga framkroppen med ett stort antal trycktäta skarvdon med beteckningen V20. Även rörkopplingar hade trycktäta genomföringar. Övriga framkroppen som fanns på mittbordet anslöts till bakkroppen, det bakre bordet med de befintliga skarvdon benämnda V61som användes när flygplanets fram- och bakkropp separerades.
Elkraftförsörjningen av hela riggen bestod av Växelström 3x200 V – 400Hz från en fast omformare samt 29V Likspänning från ett nätdrivet aggregat vilket ersatte ordinarie Flygplanbatteri och två Likriktare. Hydraultrycket för drivning av vissa system alstrades av en eldriven vätskepump som gav 210 kp tryck. Kyl- och tryckluften till berörda system försörjdes med anpassade aggregat som lämnade kylluft meden kapacitet på minst 10 liter/sek respektive 2,5 kp övertryck.
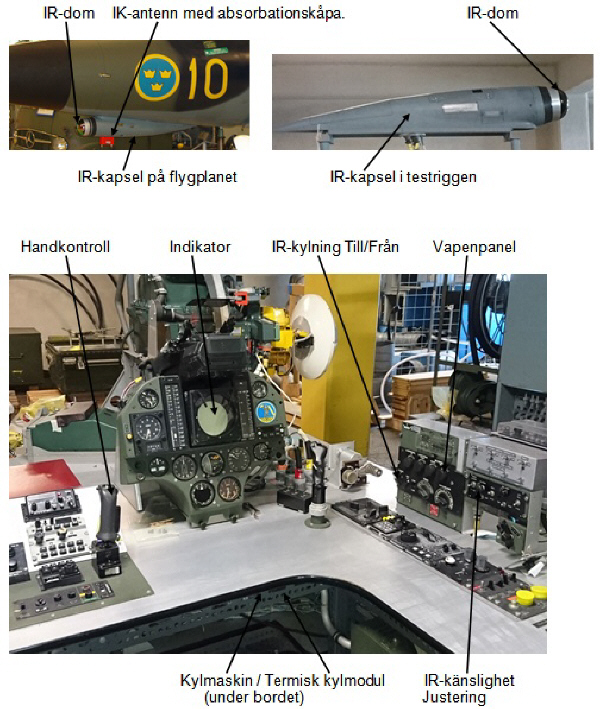
För flygplan 35F/JDenna testrigg var i grunden helt uppbyggd på samma sätt som 35B/D. Dock hade systemapparater och tillhörande kablage tillkommit i flygplanets beväpningssystem, vilka utgjordes av ett i USA utvecklat flygrobotsystem, RB27 och RB28 med ett antal för spaningsradarn och radarsiktet ingående hjälpapparater samt en IR-spanare 71 N.
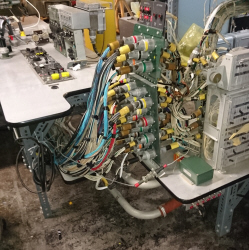
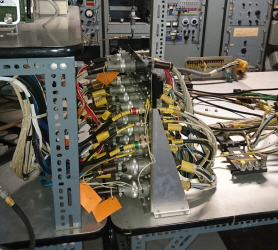
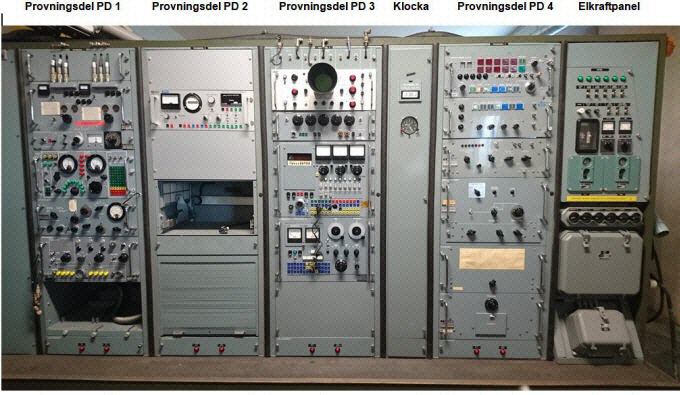
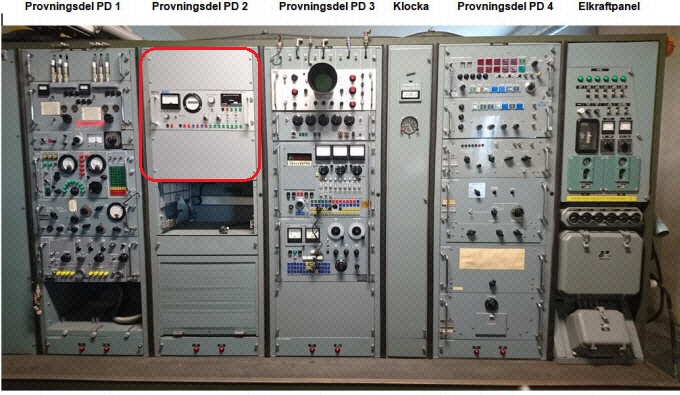
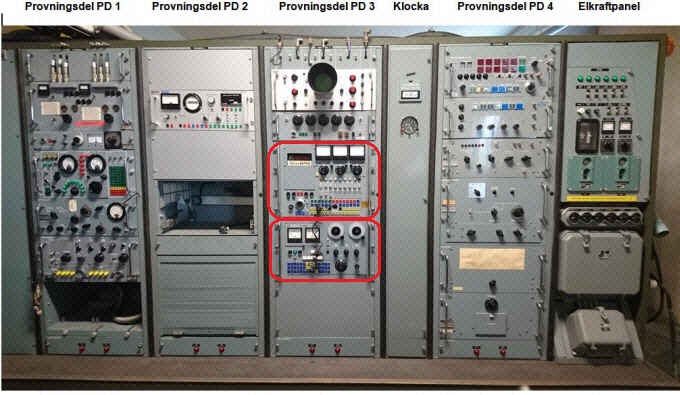
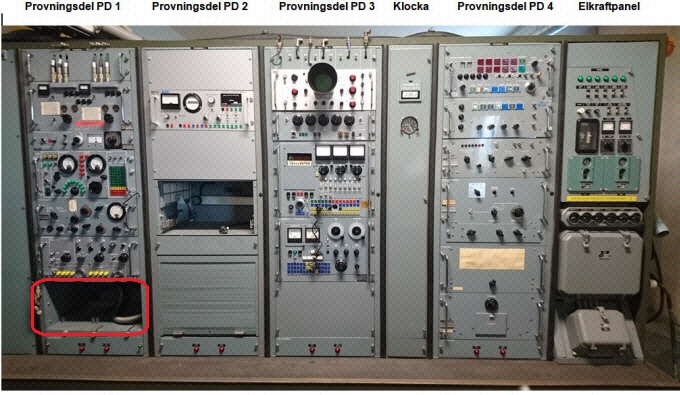
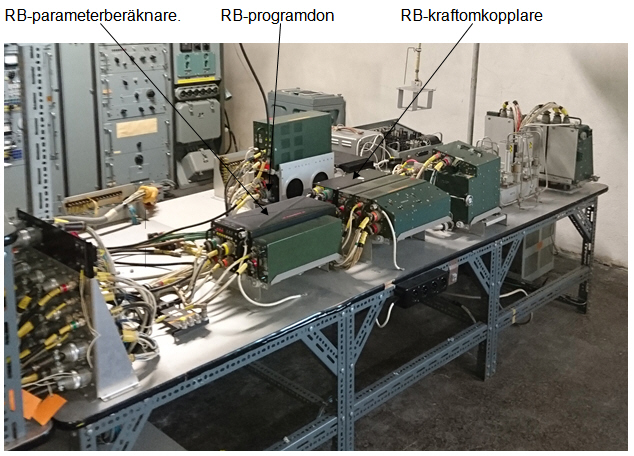
SYSTEMPROVUTRUSTNINGEN/SERVICEBUSSEN.Servicebussen 405 B/D var vid Teletestriggen efterliknad i alla delar, dock med alla provutrustningar och kablage placerade i en långsträckt Rack på hjul för lätt åtkomst och manövrering samt åskådning i samband test och utbildning. De flesta provpaneler var identiska med de som användes vid apparattest i provbänkar på flottiljverkstad och central verkstad.
Servicebussens provpaneler i Rackar Teletestrigg 35F/J.
Servicebussens/Rackens kablage anslöts typriktigt till teletestriggen som till flygplanet genom 2 x 200 - polig centralanslutning genom vilka de flesta system kunde testas. Endast Styrautomaten SA-05C och i viss mån radar PS-01/011 provpaneler och provlådor hade separat anslutningspunkt. En Operatör Op 1 hanterade servicebussens provpaneler och servicemanualen och en Op 2 skötte manövreringar och avläsningar på flygförarplatsen. Provutrustningarna i Racken drevs med 3x200V – 400 Hz från en omformare samt 230 V – 50 Hz från elnätet via en särskild panel med huvudbrytare, instrument och kontrollampor. Vid utbildning av personal för S35E kunde även denna testrigg användas i de delar som var nödvändiga för flygning i allmänhet och som var typiska för 35D eftersom 35E i grunden var en 35D.
Den taktiska delen med beväpnings- och stridsledningssystemen utelämnades då och berörde endast den personal som skulle utföra service på 35B/D. En lös provutrustning för test av Radarvarningssystemet APP-15 var kompletterade till de Servicebussar B/D som var fördelade till flygflottiljerna F11 och F21 där S35E opererade.
Servicebussen 405 F/J testutrustning var även den samlad i en Rack på hjul och anslöts till testriggens centrala testuttag som i flygplanet. Även här hade SA egna testanslutningar för sin provutrustning. En ny Provlåda IR PLIR för test av IR-spanare 71N anslöts direkt till en enhet i dess utrustning. Utbildningen av teknikerpersonal ur FV blev för flygplan 35F/J specifikt uppdelades i två delar, en TELE 1 för just flygdelen och en TELE 2 endast för beväpningsdelen eftersom den var så pass mer komplicerad än den i 35B/D.
I Flygplan J35J INGÅENDE SYSTEM och APPARATERAvioniksystemen i de olika versionerna av flygplan 35 Draken bestod av en stor mängd apparater som ingick i olika delsystemen och var systemmässigt snarlika uppbyggda versionerna emellan. Naturligt var dock att innehållet i J35A avioniksystem skilde sig en del från övriga versioner emedan det av olika orsaker hade en del avvikande amerikanska delsystem införda. Skillnaden i innehållet mellan J35B/D/F och J samt S35E var däremot liten avseende de delar som användes för flygningen i allmänhet medan sedan flygplanens beväpningssystemen skilde jaktversionerna åt. Skälen till det var att de var bestyckade med olika vapenarsenaler, J35B/D hade Jaktraketer som huvudalternativ medan J35F1/2 och J hade radar- och IR-målsökande jaktrobotar som huvudalternativ.
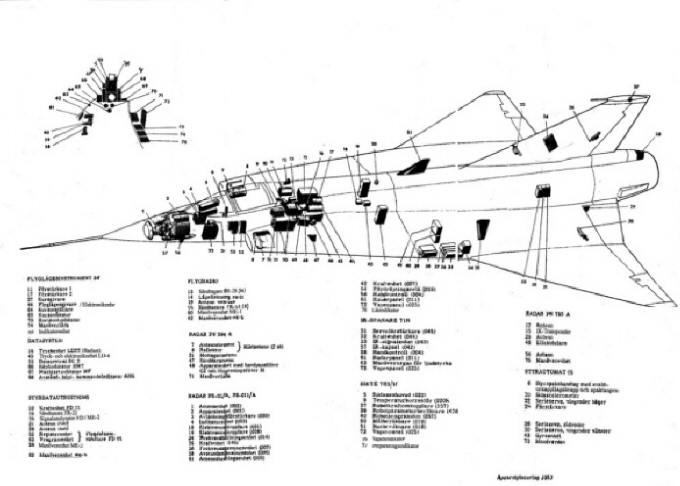
Bilden nedan visar alla delsystems apparatplaceringar i flygplan J35J. Frapperande är hur man lyckats få plats med alla mer än 75 enheter som krävdes för att uppfylla det behov som KFF beställt för den slutgiltiga utformningen i J35F2 för det ändamål flygplanet var konstruerat. I dessa versioner krävdes dessutom att flertalet enheter i beväpningssystemet måste placeras i flygkroppen, dels mellan flygplanskalet och luftkanalen till motorn och mellan flygplanskalet och EBK samt i vänster automatkanon AKAN-utrymme. Härvid hade J35F2/J bara en kanon. Totalt antal apparater kom att minska i vissa system och öka något i andra vid konverteringen från J35F2 till J35J. Det system som i särklass bestod av flest underenheter var Siktesradar PS-011 som bestod av 17 enheter. Därefter följde Sikte S-7B3, Flyglägesinstrument FLI-27 med 9 enheter, Styrdatasystem SD-11 och Styrautomat SA-05C med 8 enheter vardera, IR-spanare 71N, Flygdata FD-2, Navigeringsradar PN-594 och Igenkänningsradar PN-793 med 6 enheter vardera samt Flygradio FR-28/21 med 4 enheter. Antalen ovan utgjorde summan av de specifika apparater som sorterade under en och samma systembeteckning för respektive system. Flera system abonnerade dock på andra systems funktioner och apparater för sin funktion. Dessa utgjordes bland annat av manöverdon och indikatorer i kabinen samt luftdata och flyglägesberäknande storheter från olika apparater och därför bara räknades en gång i sammantaget för respektive system.
Avioniksystemens apparatplacering J35J
Placeringen av de olika apparaterna i flygplanet var dessutom beroende av flygplanets ideala tyngdpunktsläge för de optimala flygegenskaperna. Enheterna, som var utvecklade under andra halvan av 1950-talet och något senare under första delen av 1960 hade den teknik som då bjöds och hade förhållandevis hög vikt. Med detta följde också att elinstallationens kablage mellan alla enheter blev långa och krävde en hel del av konstruktörerna avseende impedansanpassningar och avskärmningar eftersom de flesta signaltyper var känsliga för felaktiga belastningar och störningar systemen emellan. Det utrymme som utnyttjades mest blev det som var strax bakom och i direkt anslutning till noshjulsutrymmet i flygplanskrovets främre del när detta var infällt. Men även i förarkabinen var en del apparater och indikatorer placerade liksom i nosutrymmet bakom noskonen. Denna kallades ”radom” och dess främre del var av glasfiberlaminat för att radarvågorna från radarantennen längst fram skulle kunna sända mikrovågspulser med minimal dämpning ut i etern för att från målet få reflekterade ekon tillbaka genom densamma.
I Teletestriggen J35J INGÅENDE SYSTEM OCH APPARATERStrukturen i nedanstående beskrivning är uppdelad, dels i en Flygfunktion i vilket ingår de system som var nödvändiga enbart för att flygningen skulle kunna genomföras i alla väder och mörker och dels i en Totalfunktion där alla taktiska system för genomförande av ett jaktuppdrag är tillagt. Samtliga apparater i avioniksystemet anslöts elektriskt till flygplaninstallationen med anpassade skarvdon och koaxialkontakter av olika typer och fabrikat. Där luftövertryck behövdes i apparater anslöts detta med snabbkopplingar av bajonettyp med O-ringstätningar till berörda enheter. Kylluft anslöts för invändigt eller utvändig kylning med kontätande skruvkoppling eller automatiskt i gummitätande uttag i vissa apparaters monteringsbäddar.
NOT: Avsnitt inom parantes i det följande är beskrivning av materielen som utgick när systemen (FD-2, FLI, PN-79 etc) fick “nya” enheter vid ombyggnaden till J35J.
Flygradiosystem betecknat FR-28/21.Allmänt.Radiosystemets uppgift i Flygfunktionen var att säkerställa att flygföraren med tal kunde kommunicera med markstationer och med andra flygplan vilket han kunde nyttja med två identiska system i ett normalläge och ett reservläge. Systemet och alla apparater för ändamålet samt övriga manöverorgan och antenner var utvecklade och tillverkades av Aktiebolaget Gasackumulator AGA, senare Bofors Aerotronics BA AB samt SAAB. Historisk förändrades systemet under åren 1966 till 1976 genom att ny teknik utvecklades och mer avancerade apparater infördes som bland annat medgav att större frekvensområde och räckvidd erhölls. I Totalfunktionen hade systemet historiskt två mottagare som kunde väljas med uppgift att ta emot, detektera och anpassa signalerna från markorganisationens sändare för utvärdering av digital styrdatainformation för flygplanets taktiska uppgifter. Senare när FR-28 och tre nya manöverenheter infördes hade det bara en mottagare för detta ändamål.
Ingående apparater.
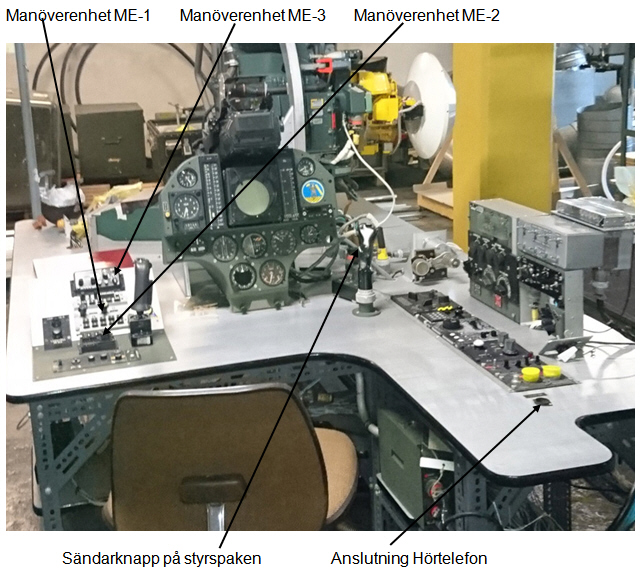
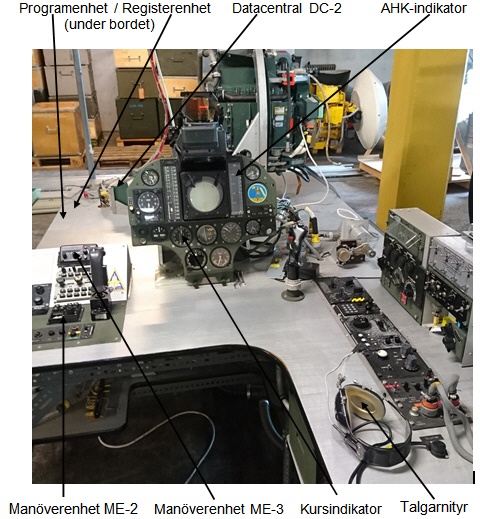
I Flygplanets förarkabin (främre bordet)
* Manöverenhet ME-1, placerad till vänster styrde frekvensvalet och modulationstyp för FR-28. Med två vred och knappar kunde ett stort antal förprogrammerade frekvenser väljas för talkommunikation med flygledning och stridsledning inom VHF- och UHF-bandet. VHF omfattade 133 – 160 MHz och UHF 225 – 400 MHz. Med en – (minus) knapp intryckt kunde alla frekvenser väljas manuellt som avlästes i ett fönster. * Manöverenhet ME-3, placerad till vänster styrde i Flygfunktionen valet av system, Normal N eller Reserv R som huvudradiostation för talkommunikation och modulationstyp samt manuellt frekvensval för FR-21 i likhet som för ME-1. I Totalfunktionen styrdes även val av rundstrålande RUND eller bakåtriktad BAK antenn för styrdatamottagning samt fanns sändarknapp TRÅD vid Trådförbindelse med stridsledningen på marken i läge Högsta beredskap. För inbyggd test av FR-28 och FR-21 fanns även testknappar och en lampa. * Manöverenhet ME-2, placerad till vänster styrde i flygfunktionen förprogrammerat frekvensval eller vid – (minus) knapp intryckt manuellt dito för sändning och mottagning i FR-21 i R-funktionen. I totalfunktionen och N-funktionen vald styrdes frekvensvalet manuellt med vred och knappar eller vid plusknapp intryckt till automatiskt förvalda frekvenser för styrdatamottagningen * Sändarknappar som fanns på Styrspaken och vid Noshjulsstyrreglaget (denna saknas i testriggen) aktiverade sändningsfunktionen i FR-28 eller FR-21 beroende på val av N- eller R-funktion. * Talganityr med Mikrofon och Hörtelefon för talkommunikation med omvärlden anslöts till höger. Motsvarande fanns inbyggda i flygförarens hjälm vilka anslöts till ett centralkoppel där även syrgastillförsel ingick.
I flygplanets främre apparatrum (mittre bordet)
* Sändtagare FR-28 i egen bädd utgjorde grunden för talkommunikation på VHF- och UHF-banden i N -funktionen. Dess sändaruteffekt var ca 20 Watt. Den hade ett automatisk Funktionskontroll FK som aktiverades var 5-e sekund. Den anslöts elektriskt till flygplaninstallationen automatiskt vid montering och till VHF/UHF- antennen via två koaxialkontakter. * Sändtagare FR-21 utgjorde grunden för talkommunikation på VHF-bandet i R-funktionerna. I Totalfunktionen och med N-funktionen vald även som styrdatamottagare. * Lågeffektsteg FR-21 gav sändaren vid sändning med FR-21 förhöjd uteffekt till ca 10 Watt. * Anpassningsenheten sörjde för elektrisk omkoppling mellan rundstrålande ryggåsantenn och bakåtriktad antenn vid styrdatamottagning och vid talkommunikation med FR-21 i Reservfunktionen. * Marktelefonanslutning, monterad på noshjulets landställsben nyttjades för telefonförbindelse mellan förarkabinen och markorganisation, så kallad ”slingan” med flygplanet i Högsta beredskapsläge eller med markpersonal vid test av annan verksamhet.
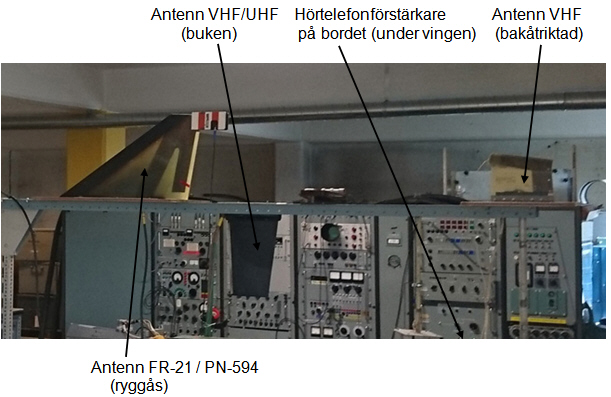
På flygplanets bakkropp (bakre bordet)
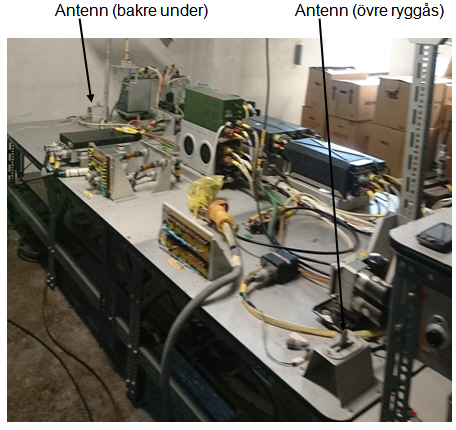
* Antenn för VHF-bandet (gemensam med PN-594) var rundstrålande och monterad på flygplanets ryggås. Den anslöts till flygplaninstallationen med koaxialkontakt och var utformad för hög fart. * Antenn för VHF/UHF-banden var rundstrålande och var monterad under flygkroppen och anslöts till flygplaninstallationen med koaxialkontakt. Även den utformad för hög fart. * Antenn för VHF-bandet med bakåtriktad funktion var monterad på bromsskärmluckorna på flygplanets stjärtkon och anslöts till flygplaninstallationen med koaxialkontakt. * Marktelefoniförstärkare med speciell anslutning för telefonförbindelse mellan förarkabinen och markorganisation, tidigare nämnd ”slingan” med flygplanet i beredskapsläge var monterad långt bak under höger vinge. Saknas i testriggen.
Serviceutrustningen för flygradiosystemet.
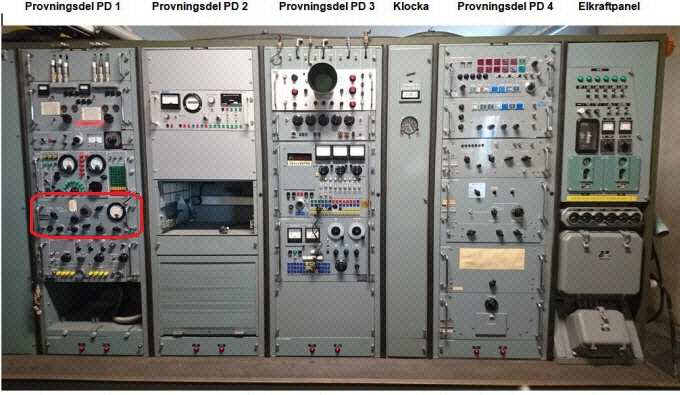
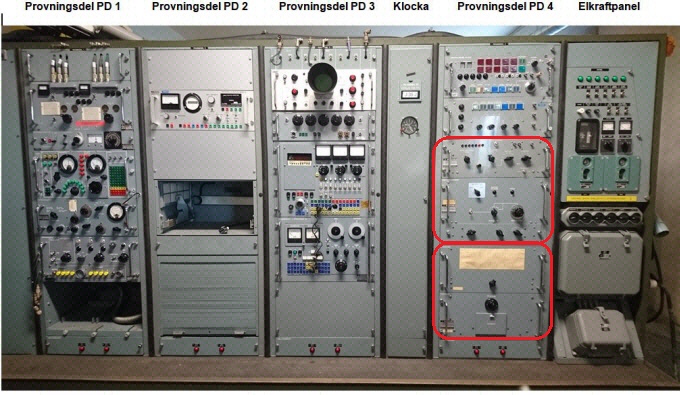
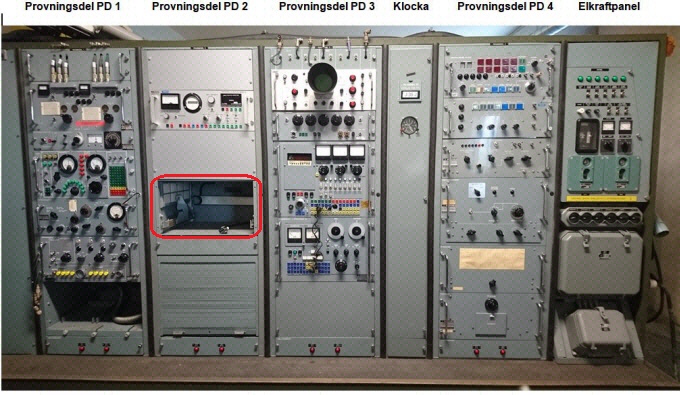
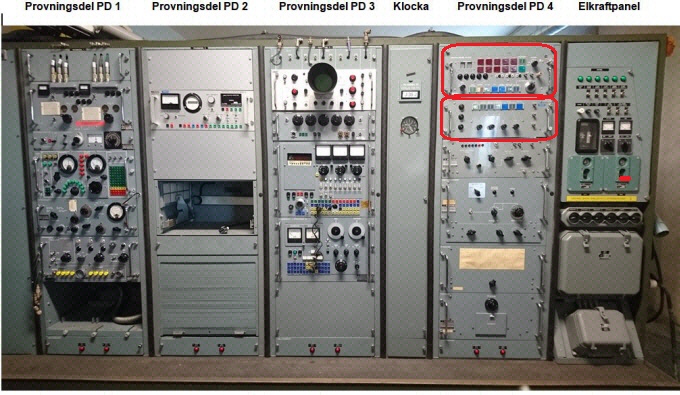
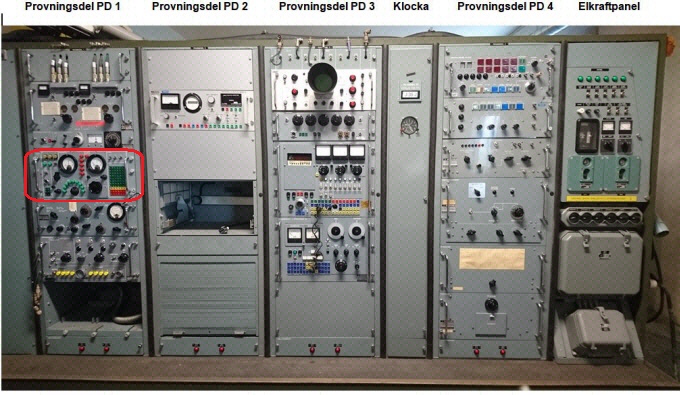
Provningsdel PD 1 i Servicebussen
* Provningsenhet FR fanns historiskt för test av hela radiosystemet. Med inställningar kunde fem kanalfrekvenser väljas och uteffekt och mottagarkänslighet för FR-21 i normal- och reservfunktion dess sändare och mottagare kontrolleras. Efter införande av FR-28 och ME-3 testades systemet företrädesvis med inbyggda tester i FR-28 och FR-21.
Lös provutrustning i servicebussen; * Antennfästet kunde monteras på ryggåsantennen och var anpassad för uteffekt- och mottagarkänslighetsmätning för FR21 samt för mottagning av styrdata. Det anslöts till Servicebussen som vid test i flygplanet via koaxialkabel. * Antenn på Servicebussens tak fanns för eterkommunikation via flygplanets antenner med flygplanets radiosystem. * Marktelefonanslutningar för telefonförbindelse med förarkabinen (två typer). Provningspanel FR och övrig utrustning utvecklades och tillverkades av CVA.
Datasystem typ 2 DS-2AllmäntDatasystemet, bestående av Luftdata LD-2 och Datacentral DC-2, utgjorde i Flygfunktionen tillsammans med de egna och samarbetande systems ett komplett informationssystem till flygföraren för att flygplanen i alla väder och mörker kunde flygas och navigeras samt landa på den utvalda hemmabasen. Systemet var därför anpassat för mätning, bearbetning och sammanställning av höjd-, fart-, mach- och avståndsinformationer samt styrinformationer till egna och samarbetande systems indikatorer. I Totalfunktionen utnyttjades systemet även för att med styrinformation från markorganisation via digital styrdata på olika indikatorer leda flygföraren till det utvalda målet, anfalla detta med optimal vapeninriktning från ett radarsikte samt återledas mot landningsbasen. Det hade även som uppgift att utföra flygskedesberoende omkopplingar till det egna och abonnerande system. Systemet och alla ingående apparater var historiskt utvecklade och tillverkades av Arenco Electronics AE AB. LD-2 utbyttes senare i J35J mot LD-8, se nedan.
Ingående apparater.
Flygplanets förarkabinen (främre bordet):
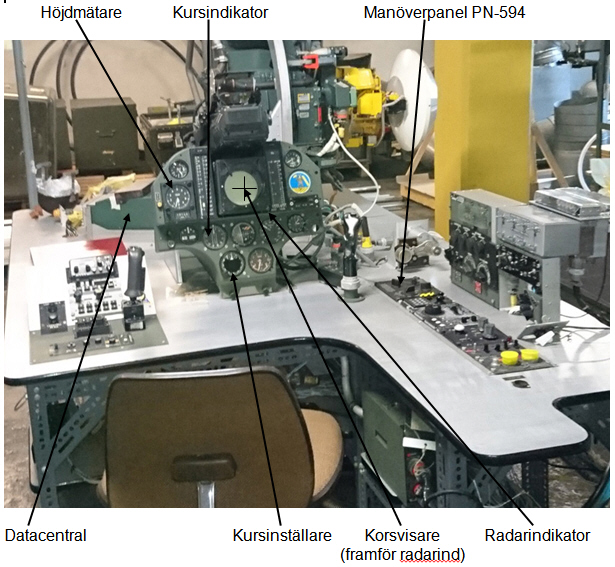
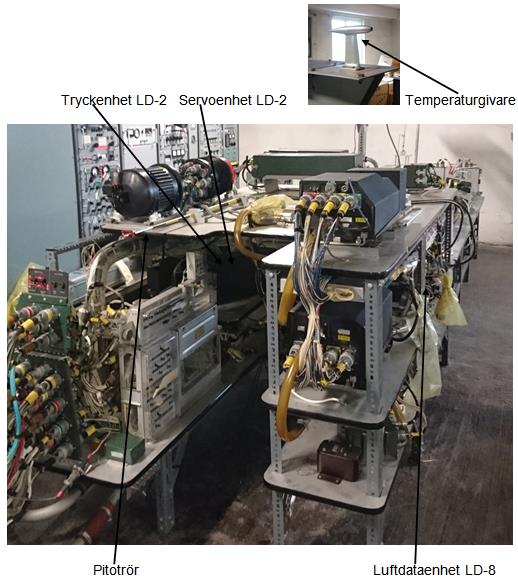
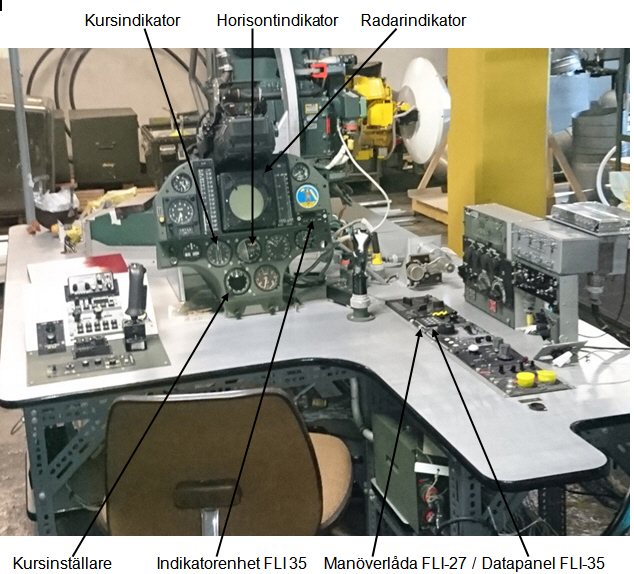
* Höjdindikator, till vänster var av klocktyp och visade 0 – 20 000 meter marktryckkompenserad flyghöjd. Den styrdes från givare i Luftdata LD-2 och senare LD-8. * Mach/Fartindikator, till vänster visade Mach-talet M som var ljudhastighetsrelaterad fart och Indikerad Fart Vi som var lufttryckrelaterad hastighet. Även dessa styrdes från givare i LD-2 och senare LD-8. * Styrindikatorn, framför radarindikatorn bestod av en korsvisare och visade historiskt i flygfunktionen flygplanets riktning och Planébana i navigeringsskedet eller flygplanets sid- och höjdläge i en inflygningsprofil i landningsskedet till olika markfyrar. Den styrdes från givare i Datacentralen DC-2. * Avstånd-Höjd-Kommando AHK-Indikator visade i Flygfunktionen Avståndet till olika markfyrar samt standardtryckrelaterad flyghöjd. Den styrdes från givare i Datacentral DC-2. * Kursindikator, under radarindikatorn presenterade flygplanets aktuella kursvinkeln, det vill säga flygkursen och ingick i FLI-27 och senare FLI-35. På ett fristyrt Visarindex visades i Flygfunktionen med hjälp av Kursinställaren inställd bankurs vid landning en inflygningslinje med hjälp av navigeringssystemet. Den styrdes med hjälp av en Förstärkare II i FLI-27 och senare FLI-35. * Kursinställaren, under radarindikatorn manövrerade det speciella Visarindexet på Kursindikatorn av flygföraren inställd bankurs i landningsfunktionen. Den styrdes med hjälp av en Förstärkare II och inkopplades av DC-2 i navigeringsskedet LANDN 40. Den bidrog då i beräkningar i DC-2 med hjälp av FLI-27 och senare FLI-35 kursangivelse och Navigeringssystemets information om flygplanets sidläge i förhållande till den inställda bankursen till en krökt inflygningslinje mot landningsbanans inkurs när flygplanet flögs med Styrindikatorns sidvisare i mittläge. * Flyghöjdinställaren FHIS inställdes historiskt av flygföraren till önskad höjd eller styrde beräkning av Plané i navigeringsfunktionen. Vid konvertering till 35J utgick FHIS. * Datacentral DC-2 monterad nere till vänster utgjorde en analog ”hjärna” i datasystemet. Av mottagen information i Flyg- och Totalfunktionens olika skeden, såsom höjd, fart och mach från luftdataenheten och inställd höjd och bankurs samt från andra system om flygplanets attityd, navigerings- och spaningsradardata och styrdata kopplades vissa direkt eller efter bearbetning och sammanställning vidare till respektive abonnerande och/eller samarbetande system. I DC-2, styrt från en omkopplare i navigeringssystemets Manöverlåda bestämde flygföraren vilket flygskede som för tillfället skulle gälla. DC-2 anslöts till flygplanets elinstallation via sex anslutningskontakter automatiskt vid montering i sin rack. * Pitotröret längst fram i nosen på flygplanet kände av det statiska- och totala lufttrycket som gav information om flygplanets höjd och fart relativt atmosfärstrycket där flygplanet befann sig. Röret värmdes för att förhindra isbildning.
I flygplanets främre apparatrum (mittre bordet):
Historiskt omfattades systemet av en Luftdataenhet LD-2 placerad i egna bäddar och som bestod av: (* Tryckenhet som omvandlade statiska (höjd) och totala (fart) lufttryck till elektriska signaler för primär styrning av systemets indikatorer för höjd- och fartindikeringar. Enheten anslöts till pitotrörets höjd- och farttrycksanslutningar med snabbkopplingar av bajonettyp.) (* Servoenheten som bestod av flertalet elektriska servon som tillsammans med höjd- och fartinformationerna, inställt marktryck, ytterlufttemperaturen och anfallsvinkeln beräknade machtal och verklig fart som primär information. Sekundär information om machtal och verklig fart samt om höjd- och fart överfördes till abonnerade system.) (Tryckenheten och Servoenheten var samtrimmade och följdes åt i par som utbytesenheter).
Vid konvertering av flygplan J35F2 till J35J ersattes, på grund av brist på reservdelar och föråldrad teknik de två enheterna LD-2 av en ny enhet; * Luftdata LD-8 GE OSO med samma funktioner. Detta LD var helt digitalt uppbyggt och krävde en del anpassning till abonnerande system. Enheten anslöts till pitotrörets höjd- och farttryckanslutningar med fasta röranslutningar. * Temperaturgivaren på flygplanets ryggås gav information om ytterlufttemperaturen för beräkningen av bland annat Mach-talet i LD-2 och senare LD-8 samt kurskompensering i FLI-27 och senare FLI-35.
Serviceutrustning för datasystemet.
Provningsdel PD 1 i Servicebussen (vänstra delen)
* Trycksimulator DS-2 sörjde för simulering av statiskt (höjd) och dynamiskt (fart) tryck och test av tidigare Tryck- och Servoenhet LD-2 och senare LD-8 samt flyginstrumenten Höjdindikator, Mach-Fartindikator och abonnerande system. Inställning av trycken gjordes med rattar och avlästes på grov- och finskalor i milli Bar, mB. Utrustningen anslöts till testriggen som vid test i flygplanet via slangar för statiskt och dynamiskt tryck med anpassade anslutningar till Pitotröret. * För simuleringen av statiska trycket Pis (vacuum) fanns en speciell pump. * För simuleringen av dynamiska trycket Qci (tryck) fanns en speciell pump. * Provningsenhet DS-2 användes för test av Datacentral DC-2 samtliga funktioner genom att med inställningar på panelen kunde samtliga in- och utsignaler till och från samarbetande system via servicebussens 2x200-poliga anslutningar simuleras respektive mätas och på berörda instrument i förarkabinen avläsas. Trycksimulatorn inklusive pumpar och Provenhet DS-2 var utvecklade och tillverkade av Arenco Electronics AE AB.
Flyglägesinstrumentsystemen FLI 27/FLI-35AllmäntUtrustningens uppgift i Flygfunktionen var att ge flygföraren information om flygplanets momentana läge relativt jordytan, vilket presenterades för flygföraren på två speciella indikatorer. I Totalfunktionen tillkom att information om tip-, roll- och kursvinklarna sändes till abonnerande system. Historiskt utvecklades och tillverkades alla ingående enheter i systemet av AGA.
Ingående apparater.
Flygplanets förarkabinen (främre bordet):
* Horisontindikator, under radarindikatorn presenterade flygplanets aktuella tipp- och rolläge samt en ”flagga” för att systemet var OK. Den styrdes med hjälp av en förstärkare F II. * Kursindikator, under radarindikatorn presenterade flygplanets aktuella kursvinkel, det vill säga flygkurs. Ett fristyrt Visarindex visade i Flygfunktionen flygförarens inställda bankurs vid landning med hjälp av navigeringssystemet och i Totalfunktionen den från markorganisationen beordrad styrkursen. Den styrdes med hjälp av en förstärkare F II. (* Manöverlådan, till höger hade historiskt inställningsvred för kompensering av bl.a. oönskade magnetiska störningar mot kursgivaren, för jordrotationen och flygplanets förflyttning, aktuell latitud och kursvinkel och flygplanets hastighet. Eventuell deviation eller lokal missvisning kompenserades av ett korrektionsnät.) * Kursinställaren, under radarindikatorn manövrerade det speciella Visarindexet på Kursindikatorn av flygföraren inställd bankurs i landningsfunktionen. Den styrdes med hjälp av en Förstärkare II.
I flygplanets främre apparatrum (mittre bordet):
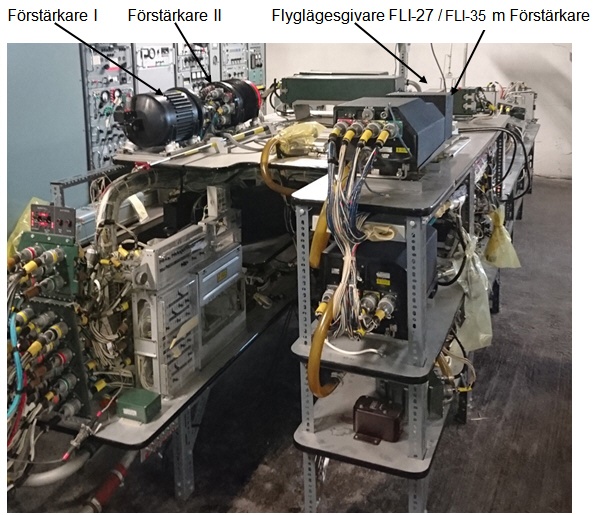
Historiskt omfattades systemet av; (* Flyglägesgivaren 27 innehållande lod- och kursgyro som arbetade enligt gyroprincipen och via kardaner var upphängda för full frihet med ett omfattande kardansystem. Gyrona hölls stabiliserade relativt horisontal- och vertikalplanet av ett övervakningssystem samt kunde snabbstabiliseras vid uppstartning av anläggningen och varna vid eventuella fel. Den var placerad i speciell bädd med stötdämpare och parallellstag för hämmande av felaktiga vinklar vid s.k. oren flygning eller flygplanets snabba vinkelförändringar.) (* Förstärkare I styrde historiskt Flyglägesgivare 27-s kardansystem med eventuella felsignaler från avkännarna i denne samt lämnade information om tipp-, roll- och kursvinklarna till abonnerande system. Den var placerad i speciell bädd med stötdämpare) * Förstärkare II kopierade flygplanets läge och förändringar i Flyglägesgivare 27 och styrde Horisont- och Kursindikatorn för visning av aktuella vinklar. Den var placerad i speciell bädd med stötdämpare.
Vid konvertering av flygplan 35F2 till 35J ersattes vissa delar i FLI-27 bland annat för brister på reservdelar och dyra underhållskostnader. Det modifierade systemet fick beteckning FLI 35 och bestod av; * Flyglägesgivare och Elektronikenhet FLI-35 som hade utvecklats och tillverkats av Lisigler i USA med beteckningen LSI 6000. FLI 35 enheter tillsammans hade ett något mindre format än Flyglägesgivare 27och kunde därför monteras på dennes plats i flygplanet. I och med detta blev Förstärkare II överflödig i sin funktion eftersom FLI-35 Elektronikenhet även lämnade information om tipp-, roll- och kursvinklarna till abonnerande system, Detta skapade hårdvaruutrymme i enheten för utveckling av en enkel navigeringskalkylator. Den fick benämningen Anpassningsenhet ANPE. Härvid blev även Manöverlådan för FLI-27 överflödig och ersattes av en Manöverpanel FLI-35. På instrumentbrädan ersattes FHIS, (se DS-2), med en Indikatorenhet FLI-35. * ANPE utvecklades vid Centrala Verkstaden i Malmslätt CVM avseende hård- och programvaran med stöttning av CVA. Funktioner som härvid skapades var beräkningar av avstånd, bäring och bränslebehov till valda brytpunkter eller landningsbaser vilka fanns lagrade i ANPE. Koordinaterna för dessa valdes från Manöverenhet FLI-35 vilka presenterades på Indikatorenhet FLI-35 * Manöverenhet FLI-35, placerad till höger i kabinen hade en Funktionsväljare för val av olika tillstånd i systemet samt tryckknappar för andra val samt en knappsats för inmatning av värden vilka presenterades på Indikatorenhet FLI-35. * Indikatorenhet FLI-35 visade de värden som inmatades under programmering och behövdes under flygning.
På flygplanets bakkropp (bakre bordet)
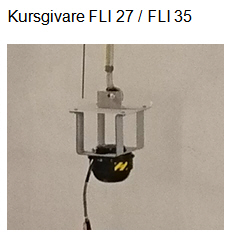
*Kursgivaren avkände det jordmagnetiska fältet och dess styrsignaler övervakade och styrde kursgyrot via Elektronikenhet 35, tidigare Förstärkare II. Den var monterad i flygplanets fena för att så lite som möjligt störas av omgivande magnetiskt påverkande föremål och material.
Serviceutrustningen för flyglägesinstrumenten.
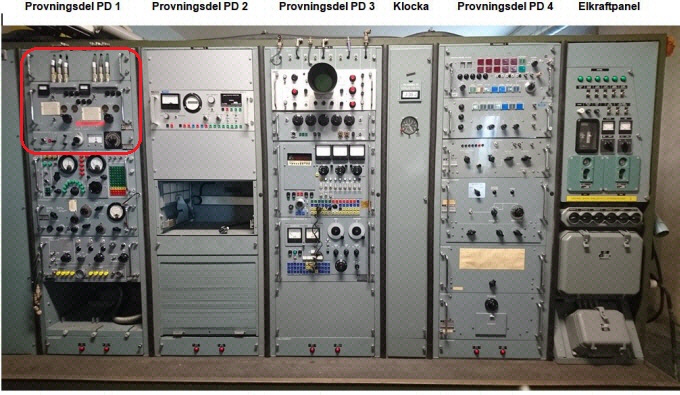
Provningsdel PD 2 i Servicebussen (vänstra delen)
(Där fanns historiskt för FLI-27 två testpaneler, en Servoprovenhet och en Manöverenhet samt en Skrivare för registrering av fel i flyglägesgivarens pendlar i dess övervakningssystem, alla utvecklade och tillverkade av AGA. Dessa kunde via servicebussens anslutning till flygplanet stimulera systemets servo- och övervakningssystem samt avläsas resultaten på skrivaren och ett oscilloskop. Vid införande av FLI-35 ersattes dessa av en provpanel, utvecklad och tillverkad av FFVAL (tidigare CVM) enligt nedan; * Provpanel FLI-35 kunde utföra för systemet motsvarande tester av hela FLI-35 inklusive ANPE. Bland annat kunde samtliga attitydvinklar styras med inställningsvred vid test av Beväpningssystemet samt alla drivspänningar för FLI-35 mätas.
Lös provutrustning i servicebussen * Devieringskikare monterades på flygplanets ryggås och användes vid deviering av FLI-27 kompass för bestämning av noggrann kurs i steg om 30 grader på en magnetiskt uppmätt devieringsplats (platta). * Devieringsdon, tillverkat av AGA anslöts historiskt i speciellt uttag i FLI-27 Manöverlåda i kabinen för att vid deviering av kompassen avmäta skillnaden mellan systemets kursaxelservo och magnetiska kursen vilken på kunde korrigeras till ett minimum för överensstämmelse dem emellan.
Navigeringssystemets radar PN-594AllmäntNavigeringssystemets uppgift i Flygfunktionen var att användas för inmätning av avstånd och riktningsfelet till speciellt utvalda rundstrålande navigeringsfyrar samt mätning av avstånd och sidlägesfelet till utvalda riktade landningsfyrar placerades i anslutning till start- och landningsbanor. Systemet arbetade på UHF-bandet. Systemet som benämndes DME (Distance Measuring Equipment) arbetade som sekundärradar vilket innebar att en fråga från flygplanet besvarades med ny sändning från markfyren vilket medförde att systemet hade stor räckvidd. Utdata från systemet presenterades efter behandling i DC-2 ett avstånd, en glidbana och riktnings- eller sidfelet på för flygföraren anpassade indikatorer med stor precision varför flygplanet kunde navigeras i alla väder och mörker ned till låg höjd. De ingående apparaterna utvecklades och tillverkades av Philips Teleindustri PT AB
Ingående apparater
Flygplanets förarkabin (främre bordet)
* Manöverlådan, till höger styrde val av funktioner för navigering via en omkopplare för Navigering NAVRIKTN, NAV 400 och NAV 40 samt för Landning, LANDN 40 och BARBRO. Med en Kodomkopplare NAV styrdes val av sändar- och mottagarfrekvenser och pulskoder för fyrar vid navigering samt dito med Kodomkopplare LAND vid landning. Den styrde även som tidigare nämnts de olika flygskeden som DC-2 olika funktioner skulle arbeta efter i flygplanets flyg och totalfunktion. * Avståndsindikatorn ingick i DC-2 AHK-indikatorn för presentation av avståndet till fyrarna från 0 – 400 km i läge NAV 400 och 0 – 40 km i läge NAV 40. Inget avstånd presenterades i läge NAVRIKTN. I läge LANDN 40 och BARBRO presenterades 0 – 40 km. * Kursindikator, under radarindikatorn presenterade flygplanets aktuella kursvinkel, det vill säga aktuell flygkurs. På ett fristyrt Visarindex visade i Flygfunktionen flygförarens inställda bankurs vid landning. Den styrdes med hjälp av Kursinställaren. * Styrindikatorn, framför radarindikatorn visade på Sidvisaren riktningen till fyren i NAVRIKTN, NAV400 och NAV 40 och sidläget i förhållandet till landningsbanans kurs i LANDN 40 och BARBRO. Höjdvisaren visade den korrekta glidbanan i höjdled till ”sättpunkten” i landningsbanas början i LANDN 40. Styrindikatorn styrdes från givare i DC-2. * Kursinställaren, under radarindikatorn manövrerade det speciella Visarindexet på Kursindikatorn för inställning av aktuell bankurs i landningsfunktionen. Den styrdes med hjälp av Förstärkare II och inkopplades av DC-2 i navigeringsskedet för landning.
Flygplanets främre apparatrum (mittre bordet)
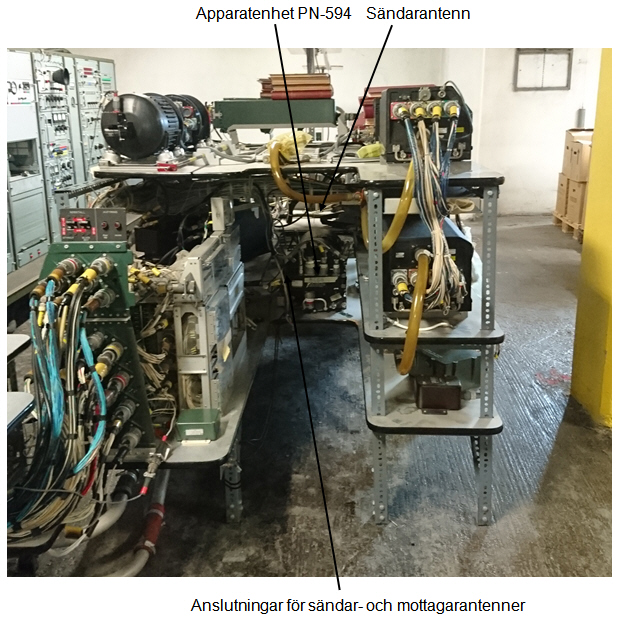
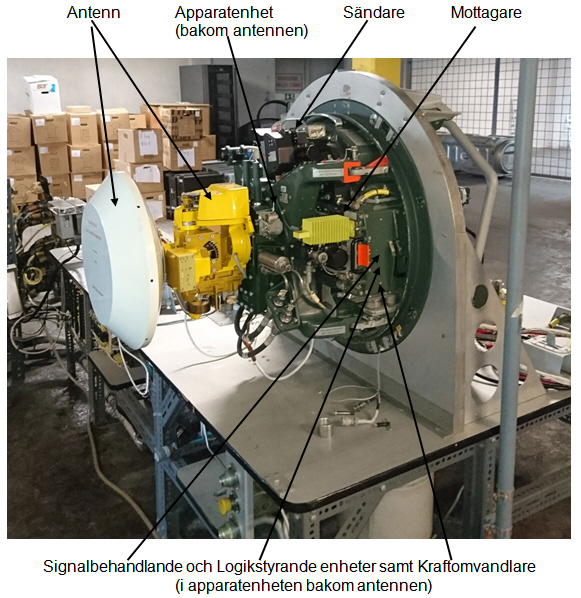
* Apparatenheten innehöll både en frågesändare och en svarsmottagare och kodomkopplare för kodning av sändning och vid mottagning samt kretsar för en omfattande signalbehandling för all operativa aktivitet i de olika funktioner NAVRIKTN, NAV 400 och NAV 40 samt LANDN 40 och BARBRO. Där ingick bland annat när systemet ”låst” på en fyr, utvärdering av avståndet till respektive markfyrar och riktnings- och sidlägesfelet till dessa samt omvandling till elektriska informationer för presentation på DC-2 indikatorer. Den hade fyra koaxialanslutningar för förbindelse till systemets antenner. Dessa utgjordes av; * Sändarantenn monterad under flygkroppen bakom noshjulet sände frågepulserna till markfyrarna i läge NAVRIKTN, NAV 400 och NAV 40 samt LANDN 40 och BARBRO.
* Riktantennerna, integrerade i flygplanets luftintag kände av fältstyrkan från svarspulserna vilka i läge NAV omvandlades till elektriska nivåer och jämfördes för bestämning av riktningsfelet. Saknas i testriggen. * Bandpassfilter mellan rundstrålande mottagarantennen och FR-21 och PN-594 separerade frekvensbanden för att inte påverka varandras systemfunktioner.
På flygplanets bakkropp (bakre bordet):
* Rundstrålande mottagarantenn, monterad på flygplanets ryggås (gemensam med FR-21) tog emot svarspulserna från markfyrarna för avståndsbestämning i lägena NAV 400/40 samt sidlägesberäkningen i LANDN 40 och BARBRO.
Serviceutrustning för navigeringssystemet.
Provningsdel PD 4 i Servicebussen (högra delen)
All signalöverföring skedde normalt via kabel till Mätadapter på rundstrålande mottagarantennen och till apparatenhetens ingångar för riktantennerna eftersom dessa saknades i teletestriggen. Sändarpulserna från flygplanet gick ut från dess sändarantenn antingen direkt till bussens mottagarantenn eller via en dämpare och kabel till PP-59 HF-enhets mottagaringång. Alla testenheter utvecklades och tillverkades av Philips Teleindustri PT AB. De bestod av; * HF-enhet för test av systemets sändar- och mottagarfrekvenser, riktnings- och sidlägesvisning i navigerings- respektive landningsfunktionen samt mätning av kraftförsörjningen i PP-59 kraftenhet. * Kod-Avståndsenhet för test av de olika kodpulsinställningarna, kontroll av avståndsmätningen i navigering och landningslägen samt minnesfunktioner och övrig låsningslogik. * R-pulsenhet för kodning av riktpulsgrupperna i läge NAVRIKN och NAV 400/40. * Kraftenhet för försörjning av kraft till PP-59 tidigare nämnda övriga enheter. * Antenn på Servicebussen för eterkommunikation med flygplanets antenner.
Lös provutrustning i servicebussen; * Mätadapter antenn PN-59 för mottagarantenn för mottagning av kodade svarspulser från PN-594 till PP-59 HF-enhet. * Mätadaptrar för två mottagarantenner för montering i flygplanets luftintag för överföring av kodade riktpulsgrupper vid kontroll av systemet riktningsutvärdering.
Styrautomatsystem SA-05CAllmänt.Styrautomaten hade tre uppgifter i Flyg- och Totalfunktionen. En av dessa var att i funktionsläge Dämpning stabilisera flygplanet i tipp- och girplanet vid manuell styrning med styrspaken i Grundstyrsystemet. Den andra uppgiften var att i funktionsläge Attityd avlasta flygföraren från styrning med styrspaken för att lättare kunna hantera andra system företrädesvis i Totalfunktionen och det taktiska uppträdandet. Detta åstadkoms genom att systemet sörja för automatisk hållning av flygplanet i roll-, tipp- och kursled samt att flygföraren med olika reglage kunde styra flygplanet i alla ledder. Den tredje uppgiften var att i funktionsläge Höjd komplettera funktionsläge Attityd med att även fixera flygplanet till den flyghöjd som gällde vid inkopplingen. Systemet och de ingående apparaterna var historiskt utvecklade och tillverkade av SAAB.
(Som komplement till Attityd-funktioner kunde historiskt i SA-05B-versionen i stället för höjdhållning automatisk Mach - hållning väljas, det vill säga ”farthållning”. SA-05B versionen bestod för övrigt av tre elektronikenheter med bland annat elektronrör och övrig teknik från den första utvecklingstiden runt början av 1960-talet.) På grund av bristande funktioner och reservdelar uppmanades företaget Honeywell i USA av FMV att utveckla en kompatibel transistoriserad Elektronikenhet med samma funktioner som i SA-05B-versionen men med ett funktionsläge Höjd-hållning stället för Mach-hållning. Det nya systemet blev alltså SA-05C-versionen. Attitydreferenserna kom historisk från FLI-27 och senare från FLI-35 och höjd- och fart-referenserna historiskt från LD-2 och senare från LD-8.
Ingående apparater.
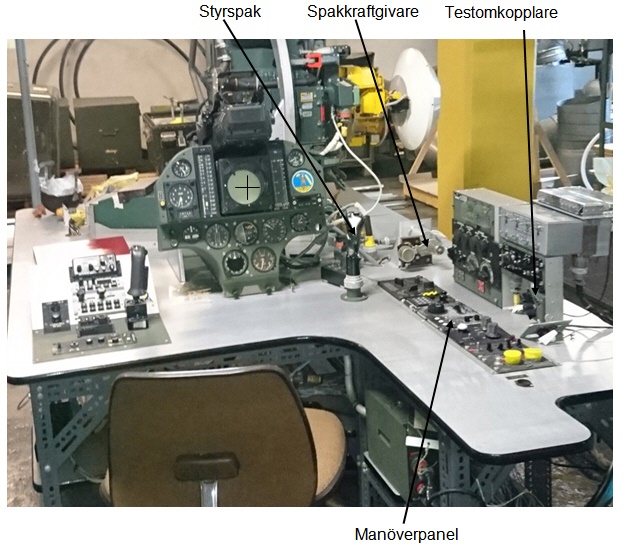
Flygplanets förarkabin (främre bordet):
* Manöverpanelen till höger styrde val av funktioner för Dämpning DÄMPN intryckt, funktioner för attitydhållning och Styrning med ATTITYD intryckt och Höjdhållning med HÖJD intryckt. Den hade även reglage för grundtrimning av flygplanet i roll- och tippled med rattar ROLL och TIPP samt kunde styras i kursled med en svängratt SVÄNG och i tippled med ett reglage för styrning NOS NED eller NOS UPP. Även en Huvudströmbrytare TILL och FRÅN fanns för SA ifall fel uppstod som kunde äventyra flygningen. Denne var normalt låst läge TILL men kunde lätt brytas till FRÅN-läge. * Styrspaken till höger hade en strömställare benämnd Spaktangent för tillfällig bortkoppling av Attityd- och Höjdhållningsfunktionen för att snabbt kunna ändra flygläget samt en Snabburkopplingsknapp SNURK för dels att snabbt kunna bryta ned SA vid eventuella felvarningar på densamma eller nollställa felvarningsystemet vid indikering STYRAUTOM på Lamptablån. * Låsdonet, här till höger som normalt ingick i styrspaksmekanismen under styrspaken fixerade styrspaken lita fastare i tippled i Attityd- och Höjdhållningsfunktionen för att ge tipptrimdomkraften större auktoritet * Accelerometerbrytaren till höger avkände belastningen som flygplanet utsattes för i tippled och kopplade ned Attityd- och Höjdhållningsfunktionen vid för stora positiva eller negativa värden. * Utlösningsdonet till höger bakom sidopanelen i flygplanet (saknas i teletestriggen) avkände spak- och roderhastigheter och kopplade ned Attityd- och Höjdhållningsfunktionen vid otillåtna värden. * Testströmställare till höger användes vid prov av Accelerometerbrytarens funktion före flygning. * Testomkopplare till höger hade tre lägen och utnyttjades för snabbtest av vitala delar i SA-05C-systemet. * Indikeringslampan STYRAUTOM på Lamptablån (finns ej i teletestriggen) visade att SA-05C utlösts av någon av ovannämnda övervakade.
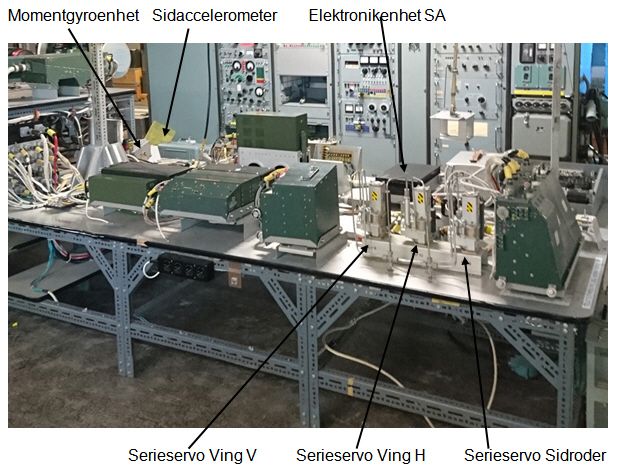
På flygplanets bakkropp (bakre bordet):
* Momentgyroenhet avkände momentana störningar i flygplanets tipp-, roll- och girled och gav signal till elektronikenheten för bearbetning och kompensering samt sända avvägda styrsignaler till de seriepåverkande roderservona för eliminering av störningarna. * Sidaccelerometern ingick i systemets renflygningsfunktion för att i elektronikenhetens bearbetning kompensera oönskade girstörningar vid varaktig snedanblåsning mot flygplanet eller vid sväng som stör dess möjlighet att flyga utan girbelastning. * Filterenhet var till för filtrering av vissa styrsignaler i styrautomatsystemet. * Elektronikenheten, monterad i flygplanets fena innehöll omfattande logikkretsar för in och urkoppling av de olika funktionerna samt förstärkare, summera och kompensera för flyghöjd och fart vid de analoga behandlingsfunktionerna i styrsystemets tipp-, roll- och girkanaler. * Serieservo för vänster vingroder styrdes från elektronikenheten som gav överlagrade vingroderstyrning +- 1,5 grader utan att påverka styrspaken. * Serieservo för höger vingroder styrdes från elektronikenheten som gav överlagrade vingroderstyrning +- 1,5 grader utan att påverka styrspaken. * Serieservo för sidorodret styrdes från elektronikenheten som gav överlagrade vingroderstyrning +- 3 grader utan att påverka sidoroderpedalerna. * Roderlägesgivare, en för varje vingroder avkände vingroderhastigheten vid styrning från elektronikenheten och lämnade signal till bland annat Utlösningsdonet för utvärdering. * Testanslutning för inkoppling av SA-05C Provpaneler i servicebussen var monterade i flygplanets fena och upphängdes med en speciell krokkonstruktion.
Serviceutrustning för styrautomatsystemet.
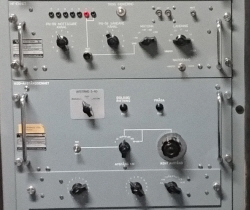
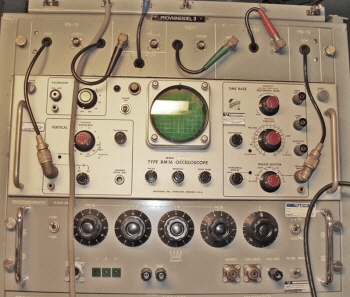
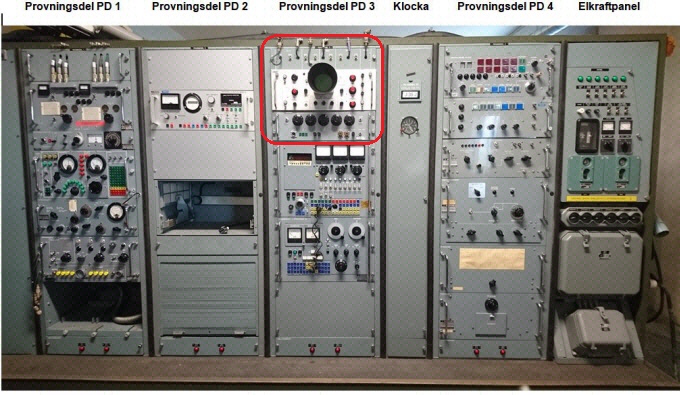
Provningsdel PD 3 i Servicebussen
* Provningsenhet I SA-05, utvecklad och tillverkad av CVM, medgav omfattande test av styrautomatens olika delar. Där ingick bland annat att kunna kontrollera serieservonas funktioner och utstyrning och ventilströmmar samt simulering av fart. Provpanelen hade även ett flertal mätuttag och ett inbyggt mätinstrument. * Provningsenhet II SA-05, också den utvecklad och tillverkad av CVM kunde mäta serieservonas styrströmmar. Även kunde från panelen simuleras tipp-, roll- och kurssignaler i stället för simulering av FLI-27 och senare FLI-35 samt olika fartvärden. Panelen hade även ett antal mätuttag. * Testkablaget för provpanelerna anslöts med speciella skarvdon i motsvarande don i flygplanets fena med eget testkablage till servicebussen, i det här fallet racken.
Igenkänningsradarsystem PN-793AllmäntMarkorganisationen hade behovet av att kunna skilja vän och fiende ur de erhållna målekona på spaningsradarns PPI-indikator, vilket systemet var avsett för. Systemet utnyttjades i första hand i flygplanets Totalfunktion och arbetade som sekundärradar med lång räckvidd med kodade pulskombinationer beroende på val av flygföraren samt på ändringsbara sändar- och mottagarfrekvenser. I Flygfunktionen nyttjades även funktionen med anledning av den långa räckvidden, när markradarn fredsmässigt övervakade flygplan och inte såg dessa på långt avstånd och låg höjd. Radarns funktion utgjordes av att en fråga sänd från markradarns kombinerade sändare- och mottagarantenn till flygplanet gemensamma mottagar- och sändarantenner besvarades efter snabb behandling i flygplanets enheter med sändning från denne tillbaka till markradarns antenn. Varje flygplansutrustning hade en egen unik adresskod motsvarande flygplanets anropssignal i sin mottagares avkodare för att särskiljas från andra flygplan. Flygförarna var av sekretesskäl hänvisade att endast nyttja kodläge 1 och 2 under fredstid. Systemet var utvecklat och ingående apparater tillverkade av LM Ericsson LME och Svenska Radio AB SRA i symbios. Ingående apparater och antenner utgjorde hemlig materiel under den operativa tiden.
Ingående apparater
Flygplanets förarkabin (främre bordet):
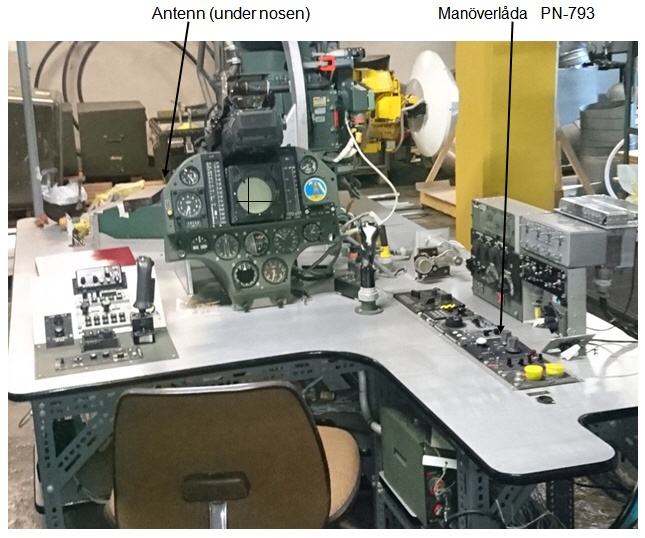
* Manöverlådan till höger styrde frånkoppling, läge FRÅN, förvärmning läge BER samt tillslag TILL med en funktionsväljare. Med en stegomkopplare inställdes olika svarskoder till markradarstationen i elva lägen varav läge 1 och 2 användes i fredstid. En indikeringslampa indikerade svarssändning eller vid test. Testomkopplaren stimulerade till två olika tester som även kunde utföras under flygning. * Antenn under nosen på IR-spanarens målsökarkapsel var en av tre parallellkopplade element. Den var frekvensmässigt anpassad till systemets höga arbetsfrekvens vilket kunde avläsas på dess längd.
Flygplanets främre apparatrum (mittre bordet)
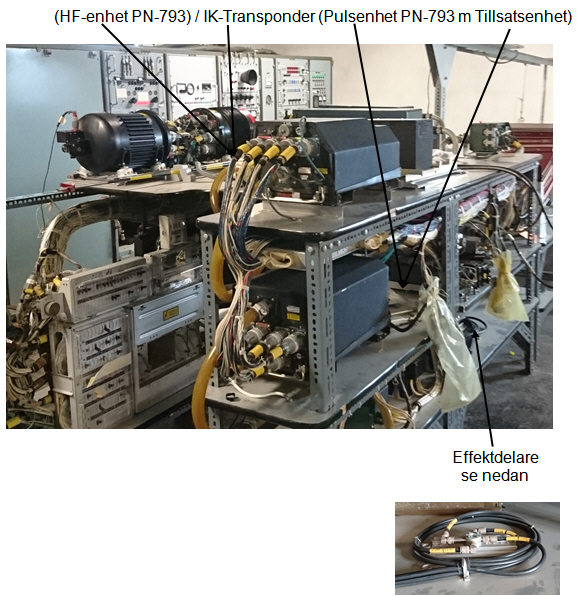
(* HF-enhet ombesörjde historiskt mottagningen av frågan från markstationen samt sändningen av svaret till densamma med avseende på rätta mottagar- och sändarfrekvenser. Dessa kunde ändras om så anbefalldes av markpersonal.) (* Pulsenhet hade historiskt till uppgift att avkoda inkommande frågepulser från mottagaren i HF-enheten samt koda svarspulserna till sändaren i densamma. Frågekoden till flygplanet styrdes från en förprogrammerad Tillsatsenhet monterad på Pulsenheten. Svarskoden styrdes från Manöverlådans stegomkopplare i kabinen.) (* Tillsatsenhet styrde historiskt koden för inkommande frågepulser vilka svarade mot flygplanets kodade adress och anropssignal. Den var inställbar med tre omkopplare samt en förbandstillhörighetspropp. Omställning skedde alltid vid byte av enhet eller om flygplanet fick ny anropssignal med speciellt verktyg. * Effektdelare parallellkopplade de tre antennerna för lika mottagarkänslighet och uteffekt till de tre antennerna.
Vid konvertering av flygplan 35F2 till 35J ersattes dessa enheter, bland annat på grund av brist på reservdelar till de tre enheterna samt ny teknik av en digitalt uppbyggd enhet enligt nedan: IK Transponder, utvecklad och tillverkad av okänt företag med samma funktioner som de äldre apparaterna. Den placerades på PN-793 HF-enhetens plats. Den saknas i teletestriggen.
På flygplanets bakkropp (bakre bordet)
* Antenn monterad på ryggåsen var den andra av tre parallellkopplade antennelement. * Antenn monterad under bakkroppen strax framför landställets sporrhjul var den tredje av tre parallellkopplade antennelementen.
Serviceutrustning.
Provningsdel PD 1 i Servicebussen (vänstra delen)
AllmäntAll test skedde via koaxialkabel till flygplansystemets antenner med anledning av avlyssningsrisken eftersom systemet måste hållas hemligt. Kabel anslöts till en av absorbtionskåporna som hade speciell sond inmonterad och som flyttades till övriga antenner för kontroll att alla antenner fungerade och hade rätt anpassning och känslighet. De övriga absorbtionskåporna förhindrade utstrålning. Systemet kunde vid behov även testas mot en antenn monterad på bussen/racken, då endast med stegomkopplaren på Manöverlådan i läge 1 eller 2. Enheterna för test bestod av; * Testenhet PN-79 hade den övergripande provningsstyrningen av systemet. Den var elektriskt sammankopplade med ett komplett flygplanssystem av den äldre typen med Pulsenhet, Tillsatsenhet, HF-enhet samt hade kabelutgång till en absorbtionskåpa för sändning och mottagning med flygplanet. Dessutom fanns ett antal mätpunkter att välja med en omkopplare samt kunde olika pulskodning utföras. Uttag för inkommande fråga och avgivande svarskod kunde kopplas till ett oscilloskop. Testenheten var utvecklad och tillverkad av LME * HF-enhet med samma funktion som i flygplanet men utnyttjades här i omvänd funktion som markstation för frågesändning och kodade mottagningssignaler till, respektive från flygplanets utrustning. * Pulsenhet med samma funktion som i flygplanet som avkodande enhet och kodning av sändaren i sin roll som markstation * Tillsatsenhet med samma funktion som i flygplanet och nyttjades vid inställning av adressen vid sändning till flygplanet från markstation.
Lös provutrustning i servicebussen; * Absorbtionskåpa med kabelanslutning och snabbkopplingsanordning för montering på antennerna. * Absorbtionskåpa, två till antalet utan kabelanslutning försedda med snabbkopplingsanordning för montering på antennerna. * Antenn för eterkommunikation med flygplanet på servisbussens tak var utformad på lika sätt som i flygplanet.
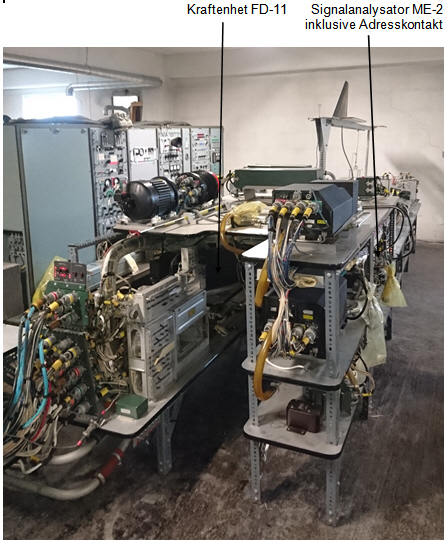
Flygdatasystemet FD-11AllmäntStyrdatasystemets uppgift i flygplanets Totalfunktion var att med digital information i ett radioöverfört datameddelande direkt från markorganisation till flygplanet informera flygföraren på DC-2-systemets AHK- indikator och Styrindikator och FLI Kursindikator om målets höjd och avstånd och direktiv i form av kommandon och styrkurs och på siktesradarns Radarindikator målets läge och avstånd. För detta krävdes att flygskede STRIL valts på Navigeringsradarns Manöverlåda. Datameddelandena var unikt adresserade i digital kod till en specifik mottagare i vars utrustning det fanns en inställbar avkodare i form av en kodplugg. I meddelandet ingick förutom adressen, digital information om målets fart och höjd, beordrad styrkurs och målbäring till rätt utgångsläge för anfall samt kunde 20 olika textade kommandon och skedesomkoppling överföras och presenteras. Systemet och ingående apparater utom ME-3 utvecklades och tillverkades av Standard Radio och Telefon SRT, senare STANSAB. Ingående enheter utgjorde hemlig materiel under den operativa tiden.
Ingående apparater
Flygplanets förarkabin (främre bordet)
* Programenhetens uppgift var att ta emot och kontrollera samt godkänna det i flygradiomottagaren detektor överförda datameddelandet och tillsammans med Registerenheten avkoda adressen. När den var rätt gav den godkänt att skifta ut hela meddelandet till Datacentralen DC-2. Datameddelandet bestod av binär information i bitform om etthundratre bitar i varje ord. Upplösningen av de ingående olika informationerna såsom målhöjd, målavstånd, styrkurs etc. hade prioriterats så att inte för stora steg uppstod vid förändringar i värden på dessa, vilket skulle påverka precisionen av värdena negativt. Test av systemet under flygning utgjorde var tredje datameddelande ett så kallat Testmeddelande vilket var programmerat så att alla flygplan skulle kunna detektera det och avläsa testresultatet på sina indikatorer. Testen aktiverades med en tryckknapp på Programenheten. * Registerenhet omvandlar datameddelandets innehåll till elektriska spänningar vilka överfördes till olika ingångar på Datacentralen DC-2. Efter behandling i DC-2 utgick anpassade elektriska spänningar för presentation på de olika indikatorerna som ingick i systemet * Adresskontakten var ansluten till registerenheten och var programmerad för det aktuella flygplanets identitet som motsvarade dess anropssignal. * Avstånd-Höjd-Kommando AHK-Indikatorns roll i Totalfunktionen var att visa innehållet i det sända datameddelandet från markstation. Där ingick på avståndsindikatorn Målavståndet i ett och på ett speciellt höjdindex som följde standarhöjdskalan Målhöjden samt ett antal Kommandon i klartext i ett eget fönster ovanför. De styrdes från givare i DC-2. * Kursindikator, under radarindikatorn visade i Totalfunktionen ett fristyrt Visarindex den via styrdata från markorganisationen beordrad styrkursen. Indexet styrdes med hjälp av en Förstärkare II som ingick i FLI-27, senare direkt från FLI-35. * Styrindikatorn, framför radarindikatorn bestod av en korsvisare och i Totalfunktionen visade Sidvisaren skillnaden mellan markorganisationens beordrade styrkurs och flygplanets aktuella kurs. Den styrdes från givare i Datacentralen DC-2. * Spaningsradarns indikator visade i Totalfunktionen med en cirkel målutpekning i sida och avstånd samt med en markör i höjd om målekots förväntade höjdvinkelläge. De styrdes via styrdata från markorganisationen av kretsar i DC-2 och FLI-27/35. * Flygförarens hörtelefon avgav en distinkt ton vid ändrat textkommando eller vid skedesväxling från markorganisation. Skedesväxlingen beordrades när målavståndet blev mindre än 40 km och en omskalning av avståndsinformationen på AHK-indikatorn övergick från maximalt 400 km till 40 km. Benämning på skedet före växling var Anflygning och efter växling Målspaning, en information till flygföraren att övergå till att själv börja målspana med flygplanets egna radar. * Manöverenhet ME-2 styrde i totalfunktionen frekvensvalet för styrdatamottagning. Detta skedde manuellt med vred med tvåsiffriga lägen samt ett sifferknappval eller automatiskt med en knapp märkt + (plus) intryckt någon av 16 förprogrammerade frekvenser. Det senare valet styrdes från en Signalanalysator och kunde ske mycket snabbt. * Programkontakt ME-2 var programmerades för 16 mottagarfrekvenser för det automatiska valet med + (plus) knappen intryckt efter signalorder från Signalanalysatorn. För att kunna täcka de mer än 40 styrdatasändarnas olika frekvenser i Sverige var systemet uppdelat i fyra sektorer, Sektor Syd SeS, Sektor Mitt SeM, Sektor Nedre Norrland Se NN och Sektor Övre Norrland Se ÖN. Härvid krävdes sålunda fyra olika programmerade Programkontakter vilka medföljde i flygplanet eller av markpersonalen vid ombasering till olika sektorer i en krigssituation eller krigsövning. * Manöverenhet ME-3 styrde i Totalfunktionen valet av system Normal N som mottagare för styrdatameddelandet och modulationstyp samt val av VHF-antenn, rundstrålande eller bakåtriktad. I läge Reserv R valdes talkommunikation val av VHF-antenn, rundstrålande eller bakåtriktad.
Flygplanets främre apparatrum (mittre bordet):
* Kraftenhet sörjer för eldrift av Program- och Registerenheterna i kabinen. * Signalanalysatorn ME-2 kontrollerade kvalitén på inkommande styrdatameddelanden på den för tillfället, av de 16 förprogrammerade valda marksändarfrekvenserna som var inprogrammerade i ME-2-s Adresskontakt. Vid för låg signalnivå gav enheten signal till ME-2 för frekvensväxling till nästa frekvens och styrdatasändare på tur att kontrolleras och eventuellt godkännas. Denna systemlösning medförde en stor hanteringsvinst för flygföraren som slapp manuellt välja nya kanalfrekvenser vilket var omständligt och tidsödande. * Programkontakt PK på Signalanalysatorn var programmerad för det aktuelle flygplanets identitet som motsvarande dess anropssignal för att endast analysera meddelanden till det aktuella flygplanet.
Serviceutrustning.
Provningsdel PD 2 i Servicebussen (höger om vänster delen)
* Provningsenhet PE FD 2, även kallad Testsändare TS SU 2990 hade alla de funktioner som behövdes för att testa systemet fullt ut. På den kunde flygplansadressen inställas och skeden samt alla måldata och kommandon simuleras för avläsning på aktuella instrument i förarkabinen. Även tidigare nämnda Testmeddelande kunde sändas och valdes med en strömbrytare. Testsändarens styrdatameddelande överfördes historiskt via flygradions Provpanel, AM- eller FM-modulerat via rundstrålande mottagarantennen på flygplanet men fick vid införande av ME-2-systemet en egen frekvensmodulerad signalgenerator för överföring samma väg till flygplanets datamottagare. Provningsenhet FD 2 utvecklades och tillverkades av SRT. Provningsenhet FD 2 utgjorde hemlig materiel under den operativa tiden.
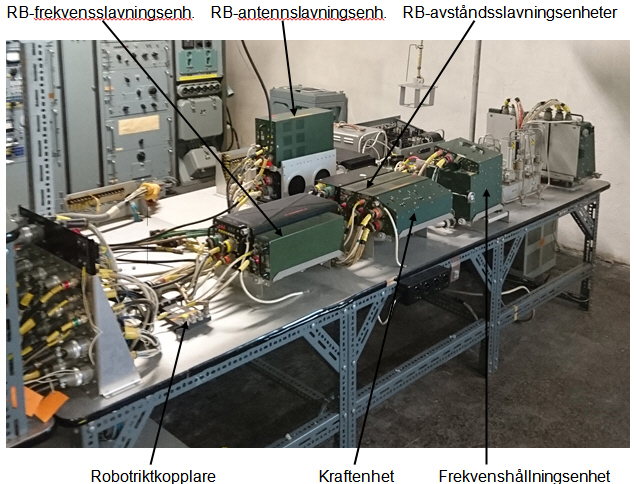
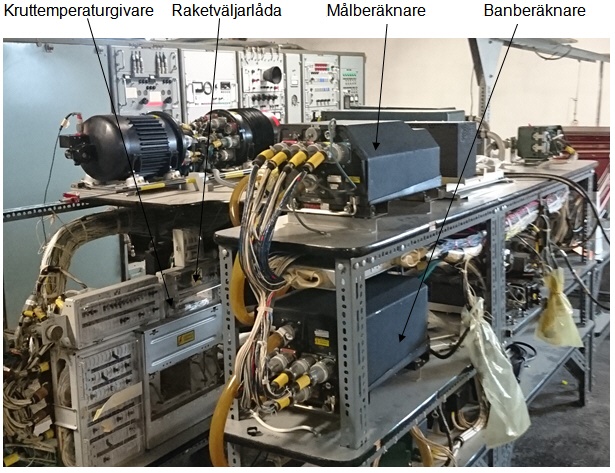
Siktesradarsystemet PS-011/AAllmäntRadarns huvudsakliga uppgift i flygplanets totalfunktion var att förmedla relevanta målrörelser och målavstånd till radarsiktet vid skjutning med Jaktrobotar i olika typer av anfall med Jaktrobotarna RB27 och RB28 och RB24. Den kunde även användas för målspaning samt presentera styrinformation från markorganisationen. Utrustningen medgav avsökning i olika spaningsprogram samt hade ett siktningsprogram för målföljning i avstånd samt sida och höjd. Målekot visades vid spaning på Radarindikatorn med en presentation typ B-scop som angav avståndet och riktningen till målet i horisontalplanet och en höjdvinkel. Vid siktning tillkom övrig information på indikatorn med en presentation typ F-scop som gav all nödvändiga styr- och tidsinformation till nominellt skjutavstånd. Dessa var framräknade av Radarsiktet för vald beväpning. Radarn var integrerad med en IR-spanare 71N vilken den hade intimt samarbete med i sida och höjd. Till systemet hörde även slavningsenheter för styrning före avfyring av jaktrobotarna RB27 med radarmålsökare och RB28 med IR-målsökare. Av dessa utgjordes en gemensam RB-antennslavningsenhet för RB27 och 28 samt en RB-avståndsslavningsenhet och två RB-frekvensslavningsenheter för RB27. Utrustningarna var i grunden utvecklade av Hughes Aircraft Co HAC i USA. Radarn vidareutvecklades av LME och SRA/FFVA. De två senare avsåg indikatorsystemet och slavningsenheter för anpassning till J35F skrov och elkablage.
Från början av 1980-talet kom radarn att genomgå en del ur elektronisk störsynpunkt och taktisk användning viktiga modifieringar i signalbehandlingen och manövreringen vid visuella anfall med företrädesvis RB27. Dessa infördes i sin helhet vid J35F2 konvertering till J35J samt redovisas kortfattat under rubriken Förändringar vid redogörelserna för radarns ingående enheter där de infördes.
Ingående apparater
Flygplanets främre del (främre bordet)
* Apparatstativet innehöll ett relativt stort antal underenheter varav Sändaren och Mottagaren samt ett antal Signalbehandlande och Logikstyrande underenheter var viktiga komponenter. Den innehöll dessutom ett omfattande förbindelsekablage mellan alla underenheter och en del detaljkomponenter. Förändringar; Vid dessa ändrades förbindelsekablaget och detaljkomponenter tillkom. ** Sändaren utgjordes av en Modulator och en Cellmagnetron med en pulsuteffekt på 200 kW. Dessa sändes ut i pulsform ca 2000 pulser med en varierande eller regelbunden pulsrepeterfrekvens PRF inom ett från flygförarplats varierande eller fast förvalda robotfrekvenser inom X-bandet, 9 – 10 GHz. Vid anfall med RB27 slavades sändaren i ett sent skede till en av de fasta förvalda robotfrekvenserna med hjälp av ett frekvenshållningssystem samt till en regelbunden noggrann PRF som var mycket viktigt för roboten senare i sin bana mot målet. Sändaren kunde väljas att antingen gå i konstlast, läge TYST på vapenpanelen eller ut i antennen läge SÄNDN. Avsikten med tystläget var att snabbt få igång sändaren emedan modulatorn och vågledarsystemet då var trycksatt. Det var historiskt inte trycksatt i läge TILL och då tog det ca 10 sekunder för trycket att byggas upp för att få igång sändaren. Tystläget ”läckte” dessutom lite uteffekt genom antennen som kunde uppfattas mottagare i störsändare på ganska långt avstånd och påverkade menligt störskyddet i radarn. Förändringar; Dessa medförde att det valbara frekvensområdet minskades till hälften för att minska frekvensinställningstiden för RB27. Vidare ändrades trycksättningen av modulatorn och vågledarsystemet och kopplades in redan i läge TILL varför effekten inte behövde gå i konstlast och sändaren var helt avstängd och inte läckte ut i antennen. I stället gick effekten ut i antennen i läge TYST vid bland annat val av radarföljning eller läge SÄNDN. Uteffekt i konstlast gjordes endast vid marktest. ** Mottagaren bestod av en Lokaloscillatorn LO med Blandare BL och en Förförstärkare FF samt två Mellanfrekvensförstärkare MF1 och MF2. Mottagarens LO slavades till att kunna ta emot återreflekterande videopulser på sändarens frekvens i ett Automatisk Frekvensreglersystem AFR. MF1 hade linjär förstärkning med Automatisk Känslighetsreglering AKR och dess Video 1 nyttjades för signalbehandling av avstånds- och antennföljningen. MF2 hade valbar linjär LIN- eller logaritmisk LOG förstärkning och Manuell Förstärkningsreglering MKR från flygförarplats. Video 2 från MF 2 nyttjades enbart för indikatorpresentationen av målekot. Förändringar; Vid införande av dessa kopplades Video 2 till signalbehandlingskretsarna i avståndsföljningen i vissa lägen vilket förbättrade radarns störresistens mot elektronisk avhakning avsevärt. ** Antennväxlaren bestod av en vågledarcirkulator med ett aktivt TR-rör som dels ställde om cirkulatorn för sändning av uteffekt ut i antennen och samtidigt skyddade mottagaren och dels ställde växeln i mottagningsläge när sändarpulsen upphörde som skydd av mottagaren vid sändning. ** Kraftomvandlare tillverkade nödvändig och anpassad kraft till elektronrör och transistorer samt till underenheterna. ** Signalbehandlingsenheterna var aktiva i antennföljnings- och avståndsföljningsfunktionerna samt styrde olika funktioner från en Handkontroll. Funktionerna åstadkoms av sofistikerade kretsar ingående i en mångfald av underenheter. I avståndsföljningen kunde väljas att följa på målekots Fram- eller Bakkant som i kombination med accelerationsbegränsande kretsar i avstånds- och antennföljningen var fördelaktiga när målet fällde störande remsor som radarn kunde låsa över på och därmed vilseledas. Vid elektronisk brusstörning kunde radarn manövreras att antennfölja på denna. Vid elektronisk störning i form av avståndsavhakande eller för antennföljningen vinkelstörande pulser påverkades dock följesystemen menligt och blev ytterst besvärliga att hantera för flygföraren med de knappar och reglage han hade att förfoga över. I vissa svåra fall kunde radarn inte följa alls på målekot eller så var detta helt dolt. Förändringar; I samband med tidigare nämnda omkoppling av Video 2 från mottagaren minskade påverkan av avståndsavhakningen drastiskt och även antennföljningen i viss mån. ** Övriga enheter var styrande vid inre test, alstrade grundsynkpulser till sändare och avståndssystem samt innehöll relälogik som styrde radarns alla arbetsmoder. Grundsynkpulsernas PRF var viktiga i systemet och kunde manuellt väljas regelbunden då den var styrd av en kristalloscillator eller oregelbunden, så kallad jittrad då den var styrd av en slumpgenerator. Det jittrande läget användes ej i fredstid av vissa skäl. I det regelbundna läget, som blev permanent före avfyring av RB27 var avståndssystemet känsligt för elektronisk avhakande störning mot närmare avstånd medan det i det oregelbundna läget inte påverkades alls och även fördelaktigt rensade bort markekon (klotter) på kortare avstånd än målekot på indikatorn. En omfattande relälogik sörjde för manuellt styrda omkopplingar till olika delar av radarns fasta funktionsmoder men även tidsbegränsade automatiska omkopplingar i vissa lägen, bland annat vid inlåsning till följefunktioner och vid vissa elektroniska störningar, så kallat Störlarm SL. Inlåsningssekvensen på målekot kunde vara märkbart störd vid avståndsavhakande elektronisk störning och störlarmet reagerade inte märkbart vid elektronik brusstörning. Förändringar; Styrningen av PRF ändrades så att den alltid var oregelbunden, utom före avfyring av RB27 som tidigare nämnts vilket gav fördelar för avståndssystemet vid elektronisk störning och att markekon uteblev på kortare avstånd än målekot. Relälogiken ändrades också som medförde ett förenklat och rationellare hanterande av radarns olika moder speciellt i störd miljö genom att flera automatiska omkopplingar kom till. Även genväg skapades för snabbare manuell antennstyrning om målekot tappades under följeskedet. Också störlarmets in- och urkoppling ändrades för en optimalare funktion. En optisk Låsindikator vid Sikte S7-B3/31 Sikteshuvud snett till höger ovanför radarindikatorn indikerade på en grön lampa att radarn låst och avståndsföljde på målekot eller om radarn blev utsatt för Brus- eller Continuous Wave CW-störnings som aktiverade ett Larm, benämnt BCL under följeskedet på en tänd orange lampa. * Radarantenn hade frihet i sida, höjd och rollplanet. Maximal uttagbar sidvinkel var plus/minus 60 grader och maximal höjdvinkel plus/minus 30 grader samt maximal rollvinkel plus/minus 110 gr. Antennriktningen kunde styras manuellt eller via sökprogram eller automatiskt vid antennföljning på måleko. I rollplanet var den horisontstyrd innan den frigjordes vid antennföljning på målekot. Antennens rörelse drevs med elektriskt styrda hydraulmotorer. Den var anpassad i frekvens till X-bandet 9 - 10 GHz och våglängden 3 cm. Antennen var av cassegrain-typ med ett bra sidolobsdiagram och stor förstärkning och hade excentriskt roterande antennlob för att möjliggöra antennföljning. Rotationen åstadkoms med hjälp av en spinnmotor som drev en något snedställd effektmatare. Den roterade med fyra olika fasta varvtal fördelade jämnt över hela flygplanparken, mellan 70-80 varv/sekund. Denna fördelning försvårade i viss mån påverkan av spinnstörningar mot radarn de första operativa åren. Senare typ av elektronisk störning kom, genom att störaren snabbt kunde mäta in radarns spinnfrekvens spinnmodulerad brusstörning, att eliminera denna fördel och kom att störa ut antennföljning mer eller mindre helt. Förändringar; För att eliminera vissa typbundna ofullständigheter i antennens rollstyrning ändrades logiken så att den alltid var horisontrelaterad vilket också gav snabbare tillgång till manuell antennstyrning om målekot tappades under följeskedet. Vidare infördes ett pulsdon som medförde att spinnfrekvensen kunde varieras vilket avsevärt försvårade inmätningen av antennens spinnfrekvens och förbättrade radarns möjlighet att följa på den elektroniska brus- eller CW-störningen eller på målekot när detta ”brände” igenom bruset.
Flygplanets förarkabin (främre bordet)
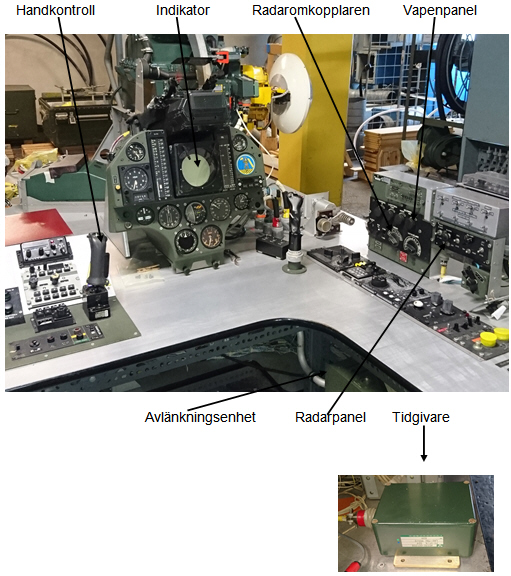
* Indikatorenhet placerat centralt i instrumentpanelen var med sitt katodstrålerör av speciell typ med två elektronkanoner vilket gav möjlighet till ställbar efterlysningstid vid presentation av B- och F-scop. Indikatorn gav flygföraren i B-skopspresentation en övergripande bild av radarns rymdtäckning i spaningsmoden samtidigt också målutpekningssymboler från styrdatasystemet i form av cirkel och ett höjdindex. Vid F-skopspresentation visades radarsiktets taktiska symboler i målföljningsläget. * Avlänkningsförstärkare AF anpassade X- och Y-avlänkningen till indikatorns katodstrålerör. * Radarpanelen, placerad till höger i teletestriggen men till vänster i flygplanet var specifik för enbart styrning av radarns och i viss mån IR-spanarens funktioner och vilket gav systemet de bästa förutsättningarna för lyckad inlåsning och målföljning. Bland annat valdes fram – eller bakkantsföljning (FRAM/BAK) vid inlåsningen på målekot varefter vid målföljning radarsiktet automatiskt styrde detta i radarn och RB27 beroende på hur anfallsgeometrin förändrades. Även LIN (linjär) eller LOG (logaritmisk) förstärkning för MF 2 kunde väljas där LOG var fördelaktigt på lägre höjder med mycket markekon (klotter). Med strömställare JITT styrdes vilken PRF som skulle gälla samt med omkopplare SMAL/BRED valdes vilket spaningsprogram som var önskvärt. Även ett reglage för inställning av Relativ Hastighet REL HAST till målet fanns när en specifik funktionsmod Simulerat Direktanfall SIM-DA inkopplades. En strömställare för val av kontroll av indikatorns presentation av B-scop eller F-scop underlättade vid fellokalisering. Förändringar; I samband med tidigare nämnda omkoppling av Video 2 i Mottagaren ändrades styrningen av FRAM- eller BAK-följningen så att valet alltid gällde för radarns följesystem men inte för RB27 följesystem som följde siktets direktiv. * Handkontrollen styrde de flesta taktiska manövreringarna. Där ingick antenn- och avståndsmarkörstyrning, mottagarförstärkning, mätområde, variabelt frekvensval, robotfrekvens val, val av radar eller IR-följning samt in- och urkoppling av olika följefunktioner på måleko eller brusstörning. Med själva handtaget styrdes antennens position i sida före inlåsning på målekot och avståndsmarkören i avståndsled. Under följeskedet styrdes eventuell återlåning i sida och avstånd efter tappat måleko med samma handgrepp. En ratt uppe på höger sida, benämnd Antennhöjdvinkel AHV styrde antennen i höjdled. En ratt med snäppläge, benämnd MKR styrde förstärkningen på indikatorvideon från MF 2. Med en omkopplar 40/16 valdes mätområde 40 – eller 16 km på radarindikatorn. En tangent benämnd VAR på höger sida styrde vid intryckning frekvensändring inom X-bandet. En knapp uppe till vänster benämnd RB styrde sändaren till inställning av aktuell robotfrekvens. En omkopplare RR/IR styrde om radarantennen eller IR-målsökaren skulle spana eller följa på målet. En trelägesomkopplare F0/F1/F2 styrde det mesta i radarns och i viss mån även IR-spanarens val av funktionsmoder. Läge F0 var ett tillståndsläge utan påverkan av funktion. Läge F1 användes vid initiering av följesystemet samt för korrigering under detsamma om målekot tappades. Läge F2 initierade rensning av funktionssystemet och styrde återgång till spaningsläge. En omkopplare S0/S1 styrde i S1-läge manuellt val av störföljning på brus- eller CW-störning från målet med minnesgång i avståndssystemet om detta uppträdde under störfritt följeskede. Uppträdde störningen innan följning etablerats kopplades upp ett så kallat SIM-DA varunder antennen följde på störningen och avståndssystemet styrdes i avstånd med handtaget och i hastighet från radarpanelens REL HAST-vred. Förändringar; Vid intryckning av knappen RB styrde den val av en ny funktionsmod i radarn där antennen styrdes till fast läge i robotbalkarnas längdriktning och radarns avståndssystem aktiverades för följningen är måleko och avståndsmarkören sammanföll. Ävenså minskade avståndsmarkörens omställningshastighet och mätområde 16 km inkopplades Med denna funktion kunde RB27 inriktas visuellt och avståndslåsas med indikering på Låsindikator vid Sikteshuvudet. Frekvensstyrningsfunktionen vid intryckning av tangenten VAR flyttades till läge F2 på trelägesomkopplaren F0/F1/F2 när denne intrycktes. Vid manöver F1 - F0 på trelägesomkopplaren F0/F1/F2 minskades avståndsmarkörens omställningshastighet och radarsändaren startade om läge läge TYST valts på VP och om omkopplaren RR/IR stod i läge RR. Vid IR-val stängdes sändaren av vilket var mycket fördelaktigt i vissa taktiska lägen. * Radaromkopplaren på Vapenpanelen till höger styrde igångsättning av radarn och olika funktionsmoder. I läge FRÅN var radarn helt utan kraft, endast antennen hade hydraultryck för att den inte skulle vara lealös och förstöra känsliga gyron vid flygning. I läge BER värmdes glödtråden i sändarens Magnetron upp. Tiden var styrd så att när läge TILL valdes krävde en Tidgivare att 180 sekunder, det vill säga 3 minuter förflutit från läge FRÅN för att inte Magnetronen skulle ta skada. Tiden från läge TILL tills radarn startade var 30 sekunder för att alla elektronrörs glödtrådar skulle värmas innan anodspänningarna påfördes. Vidare fanns omkopplare för två- och fyralinjers sökprogram för radarantennen och IR-spanaren samt val av Flygplanfast eller Horisonrelaterat sökprogram. * Tidgivaren styrde igångsättningen av radarn och sörjde för att alla delar startade tidsmässigt på rätt sätt.
Flygplanets främre del i framkroppen (mittre bordet)
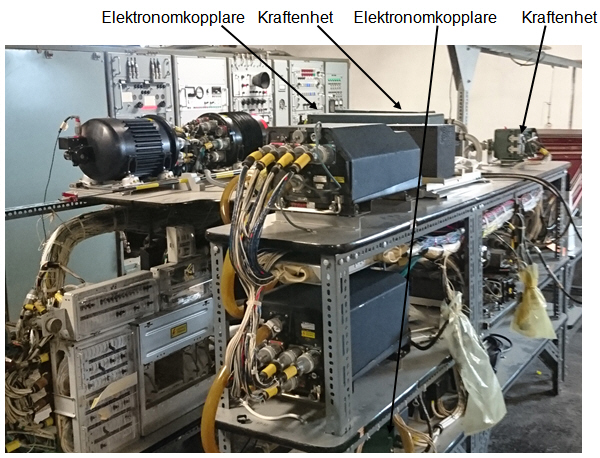
* Elektronomkopplare 028 för presentation av radardata och 031 för presentation av IR-data omvandlade och anpassade alla symboler till radarns indikator. Radardata kom från radarns antennläge, avståndssvep och måldetektering och IR-data från IR-spanarens målsökare. Styrdata kom från FD-11 via DC-2 samt taktiska symboler från radarsiktet S7-B31. Genom att PRF var ca 2 kHz, det vill säga 500µs (mikro sekunder) mellan sändarpulserna och att längsta avståndsområdet utnyttjade 266µs av detta fanns där tillräckligt med tidsutrymme fram till nästa sändarpuls att kunna rita alla symboler under den mörka tiden. När IR valdes presenterades dess data vartannat radaravståndssvep. Enheterna var trycksatta med anledning av sin placering i flygkroppen. * Elkraftenheter 027 och Likriktarenhet 023 omvandlade och likriktade råspänningar till olika stabiliserade likspänningar för kraft till radarns olika inre och yttre enheter. Enheterna var trycksatta med anledning av sin placering i flygkroppen
På flygplanets bakkropp (bakre bordet)
* Frekvenshållningsenhet angav noggrann styrning av sändarens frekvens till vald robotfrekvens från en mekaniskt omställbar kavitet, det vill säga ett hålrum vilket styrde Magnetronens inställning i ett servosystem. Detta startades när beväpningssystemet osäkrades från styrspaken eller vid A-tid från siktet och bestämde grovinställningen av frekvensen i valda RB27 med styrning från en spänningsdelare för valda RB27. Senare före avfyring inställdes robotens mottagare till rätt frekvens med referens från radarns sändare i Robotfrekvensslavningsenheten, se nedan. * Kraftenhet 146 genererade referensspänningar för synkron samt likriktade råspänningar till olika stabiliserade likspänningar till radarns olika inre och yttre enheter. * Robotantennslavningsenhet slavade in valda RB målsökare till samma riktning som radarantennen. Slavningsenheten hade en utgång för varje robotplats eftersom robotarna hade olika upphängningsvinklar på sina balkar på flygkroppen och under vingarna. Slavningssekvensen hade två delar. Vid radarlåsning på målekot startade vinkelberäkningen och i tid före avfyringen startade utställningen av robotmålsökarna till radarantennens pekriktning. * Robotavståndsslavningsenhet slavade in valda robotars avståndsföljesystem till att noggrant stämma med radarmottagarens avståndsport så att den i tidsled överensstämde med radarns målavstånd och det från målet reflekterande radarekot. Enheten hade en utgång för varje RB-plats. Funktionen hade bara en sekvens och startade i tid före avfyring. * Robotfrekvensslavningsenhet slavade med ett reglersystem in robotmålsökarens LO och mottagarfrekvens så att den överensstämde med radarns sändarfrekvens. Sex förprogrammerade RB-frekvenser kunde väljas varav en användes i fredstid. Slavningen utfördes i två steg, en grovslavning och en finslavning. Det senare i ett reglersystem som styrde robotens LO med hjälp av en AFR-blandare, en i varje robotbalk till rätt mottagningsfrekvens i tid för avfyring.
Serviceutrustning* Grovfelsökaren hade ett automatiskt eller manuellt program för fellokalisering i hela radarn. Den sände i olika valda lägen ut kända signaler och stimuli till olika enheter via de två 200-poliga anslutningarna till flygplanets radarsystem samt mätte svaret och jämförde detta med vad som skulle förväntas inom fastställda toleranser. Vid avvikelse stannade programmet eller stannades manuellt och visade på en eller två tända lampor och en siffra i ett fönster, som vid information i en manual pekade på felets art och att felet kunde finnas i en av två nämnda enheter. Felsökaren hade 52 teststeg och det automatiska programmet sökte över det med 20 – 30 steg/minut. Enheten hade även en potentiometer som vid inkoppling kunde manuellt styra radarmottagaren LO utan att radarsändaren behövde vara igång.
* Målsimulatorn genererade en målsvarspuls med vilken man kunde styra signalgeneratorer för test av radarns mottagar- och följesystem. Den kunde styra målsvarspulserna till fasta eller rörliga i avstånd, vid behov kombinerat med olika valbara närmande eller fjärmande hastigheter och positiva eller negativa accelerationer. Härvid gavs bra förutsättningar för kontroll av radarns avståndsföljeprestanda i alla delar. Grovfelsökaren och Målsimulatorn var utvecklade och tillverkade av LME.
På Provningsdel PD 4 i Servicebussen (högra delen)
Lös provutrustning i servicebussen; * Snabbtestlåda anslöts med eget kablage till avsedda testuttag i förarkabinen och var en kombinerad testutrustning för radarn och radarsiktet. Den hade många testutbud med indikeringslampor för information om olika tillstånd i utrustningarnas system, strömställare för generering av olika stimuli och indikeringar på ett mätinstrument. Avsikten var att på ett snabbt sätt får grepp om ett i första hand säkringsfel men även andra felutfall som snabbt kunde avhjälpas utan större åtgärder i övrigt. Snabbtestlådan utvecklades och tillverkades av SAAB och LME i symbios. * Radarprovare PS-011/A anslöts till radarns antenn- eller apparatenhet i avsedda uttag för test och var en utrustning enbart för radarn. För apparatenhetens del kunde i olika omkopplarlägen många logikomslag där reläer var aktiva avläsas på lampor, olika pulser kunde ses på ett oscilloskop och även lik- och växelspänningar avläsas på ett instrument eller inbyggt oscilloskop.
Även brusmätning i mottagaren kunde styras från radarprovaren samt synkpulser alstras till andra testapparater. För antennens del kunde denne styras till sina ändlägen eller till fasta dito i sida, höjd och roll samt ventilströmmar mätas i de olika hydrauliska styrventilerna. RP var utvecklade och tillverkade av LME. * Signalgenerator för kontroll av antennföljningen var ganska snävt anpassad för robotfrekvensbandet och ställdes upp framför flygplanet på ett stativ på hjul för förflyttning framför radarantennen. Den styrdes via koaxialkabel med avståndspuls från Målsimulatorn i Servicebussen/Racken. * Signalgenerator för känslighetsmätning av mottagaren matade avstämbar signal via en mätadapter direkt monterad i antennen på effektmatarens plats. Den var mycket noggrann i sin utvärdering av signalstyrkan som matades till radarns mottagare och gav ett ganska exakt värde på mottagaren känslighetstillstånd. Den styrdes med avståndspuls från Målsimulatorn i Servicebussen/Racken. Signalgeneratorn var utvecklad och tillverkad av Matic.
* Mätadapter för känslighetsmätning av mottagaren hade ett cirkulärt utstrålningsdiagram för anpassning till radarns roterande system. Den matades från signalgeneratorn med koaxialkabel som i mataren övergick i en vågledaravslutning. Mätadaptern var utvecklad och tillverkad av LME.
IR-spanare 71NAllmäntSom komplement till radar PS-011/A fanns en IR-spanare med vars hjälp upptäckt av och målsökarföljning kunde ske på IR-strålande mål som kom ur de varma delarna på målet. Utrustningens uppgift i Totalfunktionen var att intimt samarbeta med radarns antenn på så sätt att IR-spanarens målsökare slavades till radarantennen när denne var vald som styrande och när IR-spanaren var vald som styrande var radarantennen slavad till IR-spanarens målsökare. Det styrande valet gjordes på omkopplaren RR/IR på radarns Handkontroll.
IR-spanaren lämnade när IR-signal detekterats i dess målsökare information till radarns Indikator för presentation av IR-ekot samt en akustisk signal i flygförarens hörlur. IR 71N utvecklades av HAC och licenstillverkades av LME.
Ingående apparater
Flygplanets främre del och förarkabinen (främre bordet)
* IR-kapsel var monterad under flygplanets nos och innehöll ett sökarhuvud med en målsökare och framtill en IR-dom. Dess uppgift i flygplanets Totalfunktion var att uppfatta värmestrålning på infraröda frekvensområdet, så kallad IR-strålning från utvalt mål för vidare behandling i systemet. För att optimera känsligheten i målsökaren kyldes dess detektor ned för att minimera brusfaktorn. Den hade en utformning för höga farter och vara slavad till- eller styra radarantennen samt uppfatta värmestrålning från utvalt mål för vidare behandling i systemet. (* Historiskt ombesörjde en Kylmaskinen av fabrikat Westinghus att IR-måsökarens detektor nedkyldes till ca – 160 grader. Denne fick efterhand brister i sin funktion och fungerade dåligt på bland annat höga höjder på grund av fukt som frös och täppte till kylgångarna. När den fungerade kunde långa räckvidder erhållas till utvalda mål. Vid konvertering av J35F2 till J35J ersattes denna kylmaskin med en, * Termisk/ elektrisk kylmodul med bra tillförlitlighet men med lägre kylförmåga än den gamla när den fungerade. Detta medförde att målsökaren fick lägre prestanda och därmed sämre räckvidd vilken var hälften gentemot den gamla. * Manöverdon för IR-spanaren utgjordes av strömställare IR-KYLN TILL på VP till höger för igångsättning av kylmaskinen. Den var normalt blockerad i detta läge men kunde slås ifrån vid fel. Även så fanns ett reglage för IR-tröskel. * Reglage för justering av IR-målsökarens känslighet fanns på radarns Radarpanel RP till höger i teletestriggen men till vänster i flygplanet. * Handkontroll för radarn och IR-spanaren i vissa delar till vänster styrde val mellan aktiv radarantenn, läge RR eller aktiv IR-målsökare, läge IR. * Radarindikatorn, centralt placerad i instrumentbrädan presenterade all IR-information integrerat med radarpresentationen.
På flygplanets bakkropp (bakre bordet):
Allmänt.De enheter som ingick i systemet var placerade i flygplanets bakkropp var och formade efter flygplankroppen för att inrymmas på sina speciella platser. Enheterna var trycktäta och dess höljen kyldes med luft via dess gemensamma monteringsbädd * IR-signalenhet omfattade en referenssignalförstärkare med svepgenerator, två förstärkare, en feldetektor och en ljudenhet. Den avgav dels signaler för visuell och akustisk IR-information till radarindikatorn och flygförarens hörlurar och dels signaler som motsvarar IR-spanarens följningsfel för styrning av följekretsarna i Servoförstärkaren. Enheten hade även ett uttag för anslutning av Provlåda IR, PLIR. * Kraftenhet omfattade i huvudsak likriktare som sörjde för systemets kraftförsörjning. De utgjordes av glöd- och anodspänningar till elektronrör samt likspänningar till transistorer och anpassade växelspänningar för drivning av elgon och resolvrar. Enheten hade åtkomliga säkringar samt mätuttag. * Servoförstärkare omfattade en felsignalförstärkare, en för vardera målsökarens sid- och höjdkanal. Den tog emot följefelsignalerna från IR-signalenheten under IR-följning eller målsökarens slavfelsignaler då IR-spanaren var slavad till radarantennen och omvandlar dessa till styrsignaler för målsökarens omställningsmotorer.
Lös provutrustning i servicebussen; * Provlåda IR, PLIR anslöts till speciella testuttag på IR-signalenheten med eget kablage. Med omkopplare kunde många testpunkter väljas och kontrolleras med inbyggt oscilloskop och instrument. Även stimuli för styrning av IR-målsökaren kunde sändas.
Serviceutrustning.
* Strålningskälla IR monterades på IR-kapseln samt anslöts till 29 V = varmed IR-mål kunde simuleras i olika styrka och läge för känslighetskontroll och följningsförmåga. Provlåda IR och strålningskällan var utvecklade av HAC och tillverkad på licens av LME.
Sikte S7-B31AllmäntSiktesutrustningen var ett kombinerat Radarsikte och Optiskt sikte och skulle vara behjälplig flygföraren vid målinriktning av Jaktrobotar, Automatkanoner AKAN och Attackraketer ARAK. Siktet var anpassat till radar PS011/A. Radarsiktets taktiska information presenterades på radarns Indikator och informationen i det Optiska siktet på ett riktmärke projicerat i flygförarens siktlinje. Radarsiktets uppgift i flygplanets totalfunktion var att vid jaktuppdrag mot luftmål utgöra riktmedel att vid olika anfallstyper kunna styra flygplanet för avfyring av robotar på nominellt skjutavstånd samt att lämna tidsinformation för prepareringar av siktet valda robotar. För detta krävdes avancerade beräkningar i och en omfattande styrlogik, de senare utfördes i licenstillverkade Robotkraftomkopplare, Robotprogramdon samt Robotparameterberäknare. Siktet utförde detta med radardata om målets läge, rörelse och acceleration, med information om flyghöjd och fart från LD-2, senare LD-8, om flygplanets attityd från FLI-27, senare FLI-35 samt om aktuell robotprestanda genom val av vapen. Radarsiktet var i grunden utvecklat av HAC. SAAB vidareutvecklade detta och tillverkade ingående enheterna dels genom egen försorg och dels på licens avseende robotanpassningsenheterna. Optiska siktets uppgift var att ge flygföraren ett riktmärke vid inriktning mot visuella mål. För målets rörelse och avståndet utfördes analoga beräkningar bland annat med data om höjd, fart och flygläge från LD-2, senare LD-8 och från FLI-27, senare FLI-35. Det optiska siktet utvecklades och tillverkades av SAAB.
Från början av 1980-talet kom radarsiktet att genomgå en del vid taktisk användning viktiga modifieringar i signalbehandlingen och manövreringen vid visuella anfall med företrädesvis RB27. Modifieringarna var utvecklad och tillverkad vid Tekniska enheten på Upplands flygflottilj F16. Dessa infördes på uppdrag av FMV i sin helhet vid J35F2 konvertering till J35J med tekniskt underlag framtagna av CVA och CVM. Dess innehåll redovisas kortfattat under rubriken Förändringar vid redogörelserna för radarsiktes ingående enheter där de infördes.
Ingående apparater
* Vapenpanelen VP, till höger hade en Vapenväljare vars olika lägen styrde alla val av vikt i siktet och vad vapen som skulle användas. Valen kunde stå mellan enbart radarföljning, läge FÖLJN, inget vapen valt alltså, val av automatkanon, läge AKAN, val av IR-robot RB24, läge RB24, val av radarrobot RB27, läge RR eller val av IR-robot RB28, läge IR. Även val av raketer kunde göras, läge RAK för mark- eller luftmål eller IR-robot RB24, läge RAK + RB24 och lägena serieavfyring, SERIE eller impulsavfyring IMP. På panelen fanns även dolda tryckknappar för Förbikoppling av Avfyringskretsar (landställsbrytarna) vid marktest och NÖD-skjutning Robot vid robotfel. Vapenpanelen var tillverkad av SAAB.
Vapenväljarens lägen nere till höger var under den första perioden tillfredsställande men när fler tillfällen gavs för visuell inriktning av företrädesvis IR-robotar RB28 och senare RB24 och AKAN kunde inte dessa väljas utan att tappa målet i siktet. Det blev ett handikapp och önskemål framfördes i början av 1970-talet att kunna göra snabbval av AKAN med lämplig befintlig knapp på radarns Handkontroll och en indikeringslampa vid Sikteshuvudet. Detta skrinlades dock bland annat på grund av kostnadsskäl. Förändring; När ändringar, att även radarobot RB27 kunde inriktas visuellt infördes med ändrade faciliteter i radarn och med låsindikering vid Sikteshuvudet infördes även snabbval av vapen, RR (RB27 alternativt RB28) eller AKAN. Hela arrangemanget åstadkoms med reläer monterade på Vapenpanelens baksida samt utnyttjande av oanvända elledningar i flygplaninstallationen och radarstativet som förbindelse med Handkontrollen. Radarns Handkontroll styrde nu även till vapenläge RR med knappen RB, nu kallad SNARR och vapenläge AKAN med tangenten VAR, nu kallad SNAK. Läge SNAK hade prioritet före läge SNARR och båda lägena kunde rensas bort i logiken med omkopplaren F0/F1/F2 i läge F2. Av dessa knappars tidigare funktion utgick RB helt och VAR flyttades till omkopplaren F0/F1/F2 i läge F2. * Vapenindikatorn indikerade aktuellt vapenval. Denna utgjordes av lampor monterade i lämplig design i en konsol som indikerade varje vapenläge, A för AKAN, R för RR, I för IR, L eller V för RB24 beroende på var de hängde. Den placerades vid sidan av Sikteshuvudet och inkopplades med ej utnyttjade elledningar i flygplanets elinstallation. Med dessa modifieringar infört kunde flygföraren sekundsnabbt byta mellan tre vapen, RR, AKAN och förvalet på Vapenpanelens omkopplare utan att förlora målet i siktet. * Sikteshuvudet presenterade vid visuella anfall ett optiska riktmärket i ett Reflexglas vilket gav bilden ett sken av oändligt avstånd. Riktmärket avlänkades beroende på Vapenväljarens inställning och flygläget och dess ”ruteresscirkel” kunde av flygföraren med radarns Handkontroll, reglera inställning av målavståndet med hjälp av förinställning av målets spännvidd. Data om flyghöjd och fart kom från LD-2, senare LD-8 och flygläge från FLI-27, senare FLI-35 och korrigerade kontinuerligt avlänkningen under anfallet. Förändringar; När ändringar infördes att även radarrobot RB27 kunde inriktas visuellt med ändrade faciliteter i radarn och med låsindikering vid Sikteshuvudet, infördes även faciliteter i radarsiktets Banberäknare som gav tidsangivelser på riktmärkets ”ruteresscirkel” vid radarsiktets beräkning för tid kvar till nominellt skjutavstånd genom prepareringsindikeringarna A och C. Vid 10 sekunder kvar ändrades riktmärkets diameter i ett språng från maximal storlek till mellanstorlek och vid C, 1 sekund kvar i ett språng till minimal storlek. * Robotbalk F5 simulatorn ovanpå Radarpanelen till höger är specialtillverkad med anledning av att denna Teletestrigg endast hade ett balkläge för RB27 och RB28 anslutet till flygplanets elinstallation. Med denna kunde nu alla balklägen identifieras RR, vänster läge eller IR, höger läge eller ingen robot identifierad, mittläge. Detta medförde att samtliga beväpningsalternativ med dessa robotar kunde simuleras och systemfunktionen verifieras avseende vapenval, preparering och avfyring för respektive balklägen. En enkel konstruktion med stort pedagogiskt värde.
* Målberäknaren ingick i radarsiktet och bestod i huvudsak av elektromekaniska servosystem, förstärkare, summatorer och reläer. Servonas uppgift, vilka kopierade radarns inmätta målavstånd, närmandehastigheten till målet samt tidsberäkningen till nominell skjuttidpunkt var att omvandla olika funktioner till linjära axelrörelser vilka styrde potentiometrar vars utsignaler medgav att komplicerade matematiska beräkningarna utfördes som sammantaget speglade en komplett målrörelsemodell. I beräkningarna ingick analoga kretsar för summationer med hänsyn taget till tecken samt multiplikation och division. Denna och annan information överfördes till Banberäknaren för vidare beräkningar och verkställighet. I enhetens uppgift ingick även att beräkna och presentera en referenscirkel RC på radarindikatorn, som minskade till halva storleken när flygföraren skulle börja stiga mot målet. Funktionen benämndes HISS. Om behov förelåg om automatisk omkoppling för Fram- eller Bakkantföljning i radarn och RB27 skulle styras till BAK gavs signal om detta. Funktionen benämndes BAK AUT. Även ingick i enheten att beräkna och visa informationen i radarindikatorn när kollision med målet förelåg, benämndes KOLL. Förändringar; En ändring som alltid styrde till fast närmandehastighetsvillkor 125 m/sekund, benämnd BAK infördes vid val av RB28. Det förhindrade att flygföraren glömde detta när manuellt läge FRAM valts initialt (500 m/sekund) vilket äventyrade RB28 styrning i banan vid visuellt anfall. Ävenså utgick HISS-funktionen och istället visades på RC minskning att C-tid från Banberäknaren inträtt. * Banberäknaren ingick både i radar- och optiska siktesberäkningarna. Även den bestod av i huvudsak elektromekaniska servosystem, förstärkare, summatorer och reläer för beräkning av de valda vapnens prestanda. Servonas uppgift var att kopiera robotarnas flygtid och flygsträcka för radarsiktet och vara behjälpliga i optiska siktet genom att omvandla olika funktioner till linjära axelrörelser vilka styrde potentiometrar vars utsignaler medgav att komplicerade matematiska beräkningarna utfördes. Sammantaget överfördes dessa till Målberäknaren för presentation för flygföraren på radarindikatorn och i optiska siktet. De övriga komponenterna kompletterade apparatens funktion för att ge informationsdata på de berörda riktmedlen och styrning av robotprepareringar kunde realiseras. Riktmedlet bestod av en Tidscirkel TC på radarindikatorn som minskad från maximal storlek vid ca 30 sekunder kvar till avfyringsläge till minimal storlek när 1 sekund återstod till detta och av en Styrcirkel SC vilken presenterade styrfelet vid anfallsprofilen för Direktanfall DA. Robotprepareringarnas tidsangivelser vid siktesstyrt anfall angavs som tiden kvar till avfyring på nominellt skjutavstånd. Således var A-tid vid 30 sekunder kvar, B-tid vid 10 sekunder kvar och C-tid vid 1,2 sekunder kvar. Dessa signaler sändes till Robotprogramdonet för vidare styrning. Förändringar; När ändringar infördes att även radarrobot RB27 kunde inriktas visuellt ändrades styrningen av Tidscirkeln TC så att 30-sekundersvillkoret för A-tid utgick och villkoret för B-tid fick styra istället varmed TC minskade med ett språng till storlek för 10 sekunder kvar. Detta medförde att robotarna inte behövde ha till exempel glödspänning så lång tid under anfallet. Vidare styrde detta villkor för B-tid till Banberäknaren för förändringarna på Sikteshuvudets ruteresscirkel liksom villkoret för C-tid. * Temperaturkorrektören, i flygplanet monterad till främre apparatrummet men här monterad till höger och horisontellt bakom robotbalk F5-simulatorn hade till uppgift att korrigera för respektive hängda robotar eller raketer krutmotortemperatur vilket var viktigt vid beräkningen av projektilens hastighet i banan. Den inställdes av markpersonalen utifrån den förrådstemperatur vapnen förvarats i samt val av rakettyp eller RB24. Där fanns även aktiveringsbrytare för RB 28 vilka efter B-preparering av RB28 slog ifrån så att vald robot ej kunde återväljas på grund av att dess målsökarkylning var förbrukad. Ett läge för Övningsrobot ÖRB27 fanns också varvid nämnda aktiveringsbrytare ej påverkades när ÖRB27 identifierades som IR för simulering av RB28. Robotbalken var tillverkad av SAAB. * Raketväljarlådan, i flygplanet monterad i främre apparatrummet men här monterad till höger och horisontellt bakom Temperaturkorrektören styrde om raketerna skulle avfyras enkelt eller dubbelt, i det senare fallet parvis. Valet och nollställningen av funktionen utfördes av markpersonal. Robotbalken var tillverkad av SAAB.
På flygplanets bakkropp (bakre bordet):
* Robotkraftomkopplaren för RB27 och RB28 avkände vad som hängde i respektive robotbalk, RR avseende RB27 eller IR avseende RB28 och identifierade med logikkretsar samt gav villkor för olika typer av kraft till dessa. Vid tillståndet ”Yttre kraft” försågs alla identifierade robotar med drivspänning. Vid A-preparering från Robotprogramdonet inkopplades glödspänningar, förhöjd i 9 sekunder till alla robotar. Vid B-preparering kopplade systemet om till ”Inre kraft” i valda RB varvid all kraftförsörjningen övertogs av robotarnas interna kraftkälla, robotbatteriet vilket aktiverades på 0,2 sekunder. Vidare låstes vapenvalet fram till och med avfyring. Beroende på vapenval RR eller IR på Vapenpanelen valde historiskt kraftomkopplaren dubbelavfyring av RB27 eller RB28 eller avfyrades alla hängda robotar i läge ALLA..
Alltid val av enkelskott för RB28 infördes i början av 1970-talet när denne även inriktades visuellt och ändrades glödströmsförsörjningen till RB28 med låg glödspänning från start (minst 15 sekunder) och sedan förhöjd i 3 sekunder från A-preparering. Detta gjorde roboten snabbare tillgänglig. Förändringar; När ändringar infördes att även radarrobot RB27 kunde inriktas visuellt ändrades även RB27 för enkelskott samt glödströmsförsörjning som för RB28. * Robotprogramdonet bestämde logiken och sekvenserna för prepareringarna inklusive avfyring av robotarna RB27 och RB28. Prepareringarna genomfördes i steg benämnda A-prep, B-prep och C-prep där avfyringssekvensen startade samt F-preparering där avfyringssekvensen avslutades. Detta styrdes av en omfattande relälogik och med en inbyggd klocka som gick i tre-sekunders intervaller och en intervallometer som gick i två sekunder under avfyringsfasen och styrde vilka robotar som skulle parametersättas och avfyras. A-prepareringen berörde samtliga hängda robotar, RB27 i 9 sekunder och RB28 i 3 sekunder. B-prepareringen berörde valda robotar för avfyring i 6 sekunder för RB27 och RB28 vid siktesstyrt anfall på grund av robotarnas målsökares slavningshastighet (10 grader/sekund) och 3 sekunder för RB28 vid visuellt anfall då målsökaren inte slavades ut. C-prepareringen startade 1,2 sekunder före avfyring och för parametersättning av robotarnas styrsystem och tillsamman med F-prepareringen avfyrades valda robotar. Varje prepareringsintervall måste genomlöpas innan nästa kunde starta. Vid siktesberäknade anfall startade respektive preparering av radarsiktet med signalerna A-tid, B-tid och C-tid från Banberäknaren. C-prepareringen förutsatte även att föraren hade avfyringsknappen intryckt. Efter avfyring av roboten kunde ny B-preparering initieras på kvarvarande valda robotar med intryckning av avtryckaren för ett uppföljande anfall. Vid utdragen B-prepareringstid mer än 56 (RB27) eller 53 (RB28) sekunder låste systemet i ett tillstånd ”Avbryt” och B-preparerade RB28 kopplades automatiskt bort med aktiveringsbrytarna. I B-preparerad RB27 hade robotbatteriet kapacitet för 120 sekunder och kunde väljas på nytt. Men det kunde även sparas upp till en timme om B-prepareringen avbröts. Vid visuellt anfall med RB27 och RB28 startades alla prepareringar manuellt från styrspaken. Förändringar; När ändringar infördes att även radarrobot RB27 kunde inriktas visuellt kunde A-prepareringstiden kortas ned till 3 sekunder dels med ändringar i Robotkraftomkopplaren och dels med begränsning av radarsändarens frekvensband till maximalt 500 MHz. Vidare kortades B-prepareringstiden ned vid siktesstyrt anfall till 3 sekunder med införande av fördröjd nedkoppling i 3 sekunder av systemet för återslavning före nytt vapenval. Ävenså kopplades RB28 ej bort vid ”Avbryt” vid 53 sekunder efter B-preparering utan kunde avfyras. Även omkopplades så att alltid manuella prepareringar även krävdes vid siktesstyrda anfall, en fördel vid elektronisk störning mor radarn. Även en Prepareringsindikatorn invid Sikteshuvudet infördes som indikerad att RB27 eller RB28 var B-preparerad och ej avfyrad. Den styrdes med villkor från Robotprogramdonet. * Robotparameterberäknaren beräknade nödvändiga parametrar vilket gav robotens styrautomat optimala egenskaper i sin styrfunktion för den aktuella anfallssituationen vilket hade stor betydelse för god träffsannolikhet. Parametrarna beräknades analogt med hjälp av data från LD-2, senare LD-8 om egen fart och höjd samt från radarsiktet om relativa hastigheten till målet, antennhöjdvinkeln till målet samt i Banberäknaren beräknad robotgångsträcka och gångtid. Dessa data omvandlas till digitala värden i tre separata omvandlare vilka representerande tre olika Parametrar. Dessa utgjordes av flyghöjden benämnd Rå, av robotgångtiden kallad Tau och en sammanlagd parameter kallad Ny för höjd, fart, relativ hastighet och höjdskillnaden mellan målet och anfallande jaktflygplan. Övriga parametrar för RB27 utgjordes av ZON-rörsfördröjning och Fram/Bakkantsföljning vilka skulle aktiveras beroende på anfallsprofil. Processen genomlöptes i tre moment; Beräkning, Utställning och Sprängning inom en sekund efter C-preparering varefter tillstånd om avfyring gavs. * Robotbalk F5 utgjorde ”lavett” för RB27 och RB28 vilka hängdes genom påskjutning framifrån. Robotarna inkopplades elektrisk till balken med ett hissbart 50-polig kontaktdon som automatiskt lyftes vid avfyring. Balken anslöts till flygplanets system genom skarvdon. I balken fanns transformatorer och inkopplingsreläer för elektronrörens glödspänning och parametersättning i roboten samt en för Automatisk Frekvensreglering AFR-blandaren för LO i RB27. Robotbalken var tillverkad av SAAB.
Serviceutrustning.* Testenhet S-7B hade alla de funktioner som behövdes för att testa radar- och optiska siktet fullt ut. Den var uppdelad i två delar. För kontroll fanns omkopplare som styrde stimuli och kontrollmätning av ett från testutrusningen styrt radarsiktesanfall med alla prepareringar och tider vars resultat visades på ett instrument. För felsökning fanns likaledes en omkopplare och ett instrument för enbart mätning ute i systemet i flygplanet via 200-poliga skarvdonen vid olika tillstånd samt ett stort antal mätuttag allmänt kallat ”rävspelet” för yttre instrument. Provningsenheten var utvecklad och tillverkad av SAAB.
Provningsdel PD 1 i Servicebussen (vänstra delen)
Lös provutrustning i servicebussen; * Snabbtestlåda anslöts med eget kablage till avsedda testuttag i förarkabinen och var en kombinerad testutrustning för radarsiktet och radarn. Den hade många tesutbud med stimuli och indikeringar samt kontrollmöjlighet av ett flertal av siktets kraftenheters utspänningar vilka valdes med en omkopplare och indikerades på ett instrument. Avsikten var att på ett snabbt sätt i en skarp situation får grepp om ett i första hand säkringsfel som snabbt kunde avhjälpas utan åtgärder i övrigt. Snabbtestlådan var utvecklad och tillverkad av SAAB/LME i symbios.
* Riktkikare användes för att dels grundinställa Sikteshuvudets riktmärke gentemot flygplanets mekaniska inrikning avseende beväpningsbalkarnas riktning och automatkanon AKAN-s inriktning och dels att inrikta Sikteshuvudets reflexglas efter byte till nytt Sikteshuvud. Riktkikaren utvecklades och tillverkades av NIFE. * Robotsignaltestare RBST innehöll alla faciliteter för allt som skulle testas i beväpningssystemet vid ett med olika inställningar av påverkande systems inverkan iscensatt simulerat robotanfall. Den anslöts till robotbalken på samma sätt som skarp RB27 eller RB28. Där fanns de rätta elektriska belastningarna som motsvarade en skarp robot och aktiveringsbrytare som utlöste vid olika tillstånd, indikeringslampor som tändes allt eftersom ett anfall genomlöptes och förblev tända tills återställning gjordes. En AFR-enhet fanns också för kontroll av frekvensinställningen för RB27 samt omkopplare och indikeringsinstrument för målsökarutställningarna RBST var utvecklad och tillverkad av HUGAT (HAC).
* Brutenkretsprovare användes för att kontrollera att ingen elektrisk spänning fanns till beväpningsbalkarnas avfyringskretsar innan skarpa robotar anslöts till beväpningsbalken. Brutenkretsprovaren var tillverkad av CVM.
Övrig provutrustning i servicebussen:
Provpanel 3 (vänster om panel 4)
Allmänt.Som gemensam utrustning för test av och koppling mellan flygplansystem och servicebussen fanns: * Korskopplingspanel för anslutning av testkablar bland annat till ett oscilloskop. System som kunde utnyttja denna var Flygradio FR-28/FR-21, Navigeringsradar PN-594, Flyglägesinstrument FLI-35, Flygdatasystem FD-2, Igenkänningsradar PN-793 och Siktesradar PS-01/011 och Radarsikte S7-B3/31. * Oscilloskop Tektronics OST Typ RM16 (Rackmonterad 310). Användes vid mätningar på nästa samtliga system i flygplanet och Servicebussen/Racken. * Dekadtransformator användes vid noggranna jämförelsemätningar mot potentiometerinställningar i ett flertal system. Dekadtransformatorn var tillverkad av SAAB.
|