![]()
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
DATAMULTIPLEXUTRUSTNING TM-11C
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Grundenhet TM-11C sändare
|
BakgrundTM-11C utvecklades och tillverkades av Magnetic AB i Bromma, på uppdrag av Flygmaterielförvaltningen. I drift i FTN 1968 till 1980. Ersattes av TM-19C under en övergångsperiod 1972-1980. INLEDNINGALLMÄNTDatamultiplexutrustning TM-11C används för överföring av övervakningssignaler i försvarets fasta radiolänknät. Med övervakningssignaler menas indikerings-, fjärrmanöver- och fjärrmätsignaler i form av jordslutningar och logiska nivåer. TM-11C används på anläggningar som skall fjärrövervakas, s k understationer (FÖU), exempelvis relästationer, mindre knutstationer eller utpunkter till centraler.
I anläggningar varifrån övervakningen skall ske, s k huvudstationer (FÖH), exempelvis större knutstationer och centraler, används TM-11B. TM-11B och TM-11C tillsammans med primärmux TM-11E utgör ett fjärrövervakningssystem (FÖ).
TM-11C omvandlar, genom tidsdelning, parallellinformationen i 128 T/F-kanaler (TILL/FRÅN) till serieinformation i åtta kanaler. Informationen i dessa åtta kanaler överförs över TM-11E och FSK-utrustningen i en FSK kanal på en radiolänkförbindelse eller i en telefonikanal till TM-11B- utrustningen på huvudstationen där informationen behandlas och presenteras.
De 128 kanalerna i TM-11C är indelade i 16 grupper om vardera åtta kanaler. Avsökningen av kanalerna sker gruppvis antingen automatiskt grupp för grupp, så kallad huvudlarmavsökning, eller manuellt av enstaka grupper på order från huvudstationen, sk detaljlarmavsökning. Vid huvudlarmavsökningen kan maximalt åtta av de 16 grupperna avsökas. I dessa grupper överförs viktigare larmar och indikersignaler samt samlingslarmar vars enskilda larmar överförs i resterande grupper. Vid detaljlarmavsökning kan vilken som helst av de 16 grupperna väljas. Antalet huvudlarmgrupper kan programmeras till två, fyra, sex eller åtta. Resterande grupper av de 16 utgör detaljlarmgrupper.
För att kunna utföra val av detaljlarmgrupp i TM-11C fordras styrsignaler från huvudstationen. Dessa överförs på den tidigare nämnda TM-11E/FSK- förbindelsen, som är dubbelriktad. Styrsignalerna belägger inte samtliga kanaler i TM-11 E. Resterande kanaler (åtta) kan användas för överföring av fjärrmanöversignaler, eller för överföring av mätpunktsval vid fjärrmätning. Om fjärrmätning används reserveras detaljlarmgrupp 16 för överföring av det digitala mätvärdet.
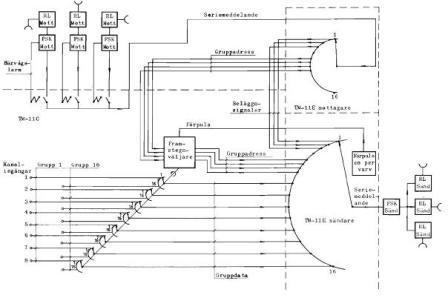
Bild 1 visar principen för en understation med TM-11C. Parallell- till serieomvandlingen åskådliggörs här med mekaniska väljare. TM-11C utgörs av åtta väljare med vardera 16 lägen och med gemensam axel.
Informationen från de åtta väljarna matas till väljaren i TM-11E sändare där omvandling till ett enda seriemeddelande sker. Från TM-11E sändare matas en förpuls, före varje nytt varv i TM-11E, som stegar fram väljarna i TM-11C. Under första varvet i TM-11E står TM-11C-väljarna i läge 1 och den information som ligger på väljarnas första ingångar (grupp 1) överförs. Under nästa varv i TM-11E står väljarna i läge 2 och grupp 2 överförs o s v.
TM-11C, funktionsbild
För att TM-11B skall veta vilken grupp som överförs sänds även en gruppadress om fyra bitar över TM-11E till huvudstationen. Seriemeddelandet från TM-11E görs om till ett frekvensskift, som matas till en eller flera radiolänksändare för överföring till maximalt tre huvudstationer.
Om någon av huvudstationerna önskar utföra manuellt val av grupper, sänds en FSK-signal från huvudstationen, varvid en inverterad bärvågslarm från FSK-mottagaren, över reläer i TM-11C, kopplar in den demodulerade FSK-signalen (seriemeddelandet) från uppkallande station till TM-11E-mottagaren. TM-11E mottagaren delar upp seriemeddelandet i 16 parallella kanaler. Tre av dessa kanaler innehåller sk beläggningssignaler vilka matas i retur till den uppkallande stationen och samtidigt talar om för övriga huvudstationer att understationen är upptagen. Varje huvudstation har sin egen beläggningssignal. I fyra TM-11E kanaler kommer gruppvalet som matas till TM-11C och tvångsställer väljarna till önskad grupp.
TEKNISKA DATA
Sammanställt av Roland Persson Senast uppdaterad 2013-12-05
Källa: Utdrag ur Beskrivning M7773-423860 Uppgifter från Ingemar Engdahl
Läs mer: Teknisk övervakning inom försvaret. Skrivet av Ingemar Engdahl
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||