Allmänt
För
att kunna flyga i alla väder
och i mörker krävdes i ett jaktflygplan information till föraren från
instrument som ersatte de yttre referenserna. Även flygplanets taktiska
system och styrautomat behövde motsvarande information. Viggenflygplanet
JA37
var utrustade med en avancerad avionikanläggning för
flyglägesindikering till flygföraren. Utrustningen var i huvudsak
utvecklad vid Svenska Aeroplan AB SAAB på uppdrag av Kungliga
Flygförvaltningen KFF, senare Försvarets Materielverk FMV. I systemet
ingick enheter ingående i flygplanets primärdatagivare bland annat en
gyrobaserad Mätenhet för attitydvinklar ingående i
TröghetsnavigeringsutrustningenTN från Singer i USA.
Flyglägesinstrumentens uppgift var att ge flygföraren
information om flygplanets momentana läge relativt jordytan, det vill
säga flygplanets roll- tipp- och kursvinklar. Vinklarna presenterades
dels direkt på för informationen utformade instrument och dels indirekt
genom utrustningen för Elektronisk Presentationen
EP-12 på dess
Siktlinje- och Målindikatorer, SI respektive MI. Vidare
användes flyglägesvinklarna i abonnerande system som Radar
PS-46 och Styrautomat
SA-07
samt till Centralkalkylator
CD-107/207
för vidare befordran till EP-12.
Systemets ingående enheter utgjordes av;
Uppbyggnad och Funktion
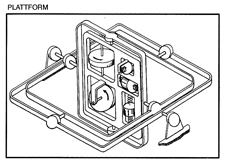
IME-enheten
utgjordes av en plattformsdel, en kraftförsörjningsdel och
elektronik för signalbehandling samt inmatning och utläsning av
information. Plattformsdelen innehöll två tvåaxliga gyron för definition
av mot varandra vinkelräta riktningar X, Y och Z samt Accelerometrar
Acc i dess tre riktningar. Den fjärde gyroaxeln utnyttjades för
övervakning av plattformens funktion.
Plattformen var inlagrad i ett kardansystem som bestod av kurs-
och tippkardan samt inre och yttre rollkardan, vilka isolerade
plattformen från flygplanets rörelser.
Kraftdelen försörjdes från flygplanets växelströmsnät eller vid avbrott
från detta från likströmsnätet genom en DC/DC-omvandlare. Elektroniken
innehöll bland annat funktioner för övervakning av lodriktningen av
plattformen samt kretsar för omvandling av analoga signaler till
seriebinära och tvärt om. För attityd- och kursvinkelsignaler fanns på
respektive kardaner direkta utgångar från mätenheten till FLI och
KI samt Radar och Styrautomat.
För att den gyrostabiliserade plattformen skulle kunna användas
som kurs- och attitydreferenser orienterades den noggrant relativ norr
och lod med flygplanet på marken. Denna Förinställning gjordes med
flygplanet på marken. Lodriktningen bestämdes genom att signalerna från
Acc mättes och norrriktningen bestämdes genom så kallad
gyrokompassering.
Gyrokompassering utnyttjar att plattformen inte ändrade
riktning, roterade med flygplanet och jordrotationen. I ställer
såg det ut som om plattformen roterade. Systemet mätte alltså hur
plattformen roterade och avgjorde i vilken riktning jordaxeln pekade.
När systemet kände lod och jordaxelns riktning, kunde det peka ut
nordriktningen. Emedan vinkeln mellan lod och jordaxeln var beroende av
latitud, kunde systemet vid kännedom om detta (inmatades via Datapanelen
DAP) godkänna den uppmätta jordaxelriktningen.
Förinställning av plattformen skedde i sekvenser. Den startade
vid driftsättning av IME och CD. Lampa TN tändes på en
Indikeringstablå ITF och sista siffran visade 9 i DAP.
Under sekvens 1 slavades plattformen till flygplanaxlarna och därefter
startades gyrosnurrorna och var slut efter 20 sekunder. Under sekvens 2
efterlodades plattformen till vågläge i 10 sekunder. Under sekvens 3
förättrades beräkningen av lodläget och genom gyrokompasseringen
beräknades plattformens kurs i förhållande till geografiskt norr. Efter
180 sekunder avslutades sekvensen, lampan TN hade slocknat på ITF
och sista siffra ändrade sig till att visa 6 i DAP och
plattformen gav acceptabla värden till FLI och KI.
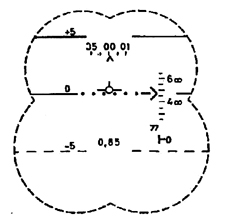
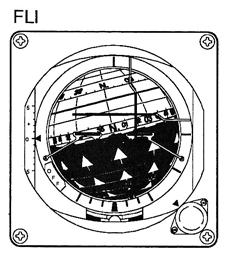
Presentationen
Flyglägesindikatorn FLI bestod av en treaxlig klotindikator för
roll- tipp och kursvinklar. Den hade även en Korsvisare, en Variometer
och en Libell. Klotet var lagrat i en gaffel som ställdes om av en
rollmotor. I tipp och kurs ställdes klotet om av tipp- och kursmotorer.
Klotet delades av en horisontlinje och var försett med kurs- och
tippvinkelgradering. Indikatorn hade en fast
flygplansymbol mot vilken alla vinklar avlästes. En felvarningsflagg
indikerade vid servo- eller kraftfel.
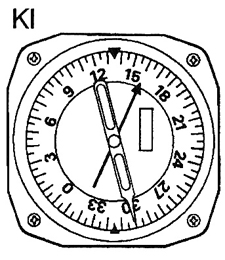
Kursindikatorn KI var en servodriven indikator som visade
flygplanets kurs med en roterande kompasskala mot ett fast index.
Dessutom presenterades bäring till målet eller destination alternativt
kommenderad kurs (smal visare) samt målets värdvinkel eller, vid
landning banriktningen (bred visare).
Reservinstrument för flyglägesvisning utgjordes dels av en mekaniskt
uppbyggd Reservhorisont med begränsad frihet och dels en
magnetisk Reservkursanläggning
Fpl37.
Skrivet av Göran Hawée
Senast
uppdaterad 2020-03-22.
Källor: Beskrivning AJ37 del 1
|