|
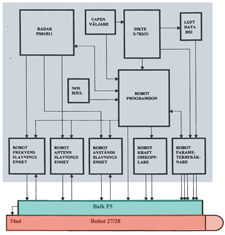
Översiktsbild
Robothjälpapparater RB27/RB28.
Stor bild

Robotprogramdon 057

Robotprogramdon 057 utan sidoskyddsplåt.

Robotkraftomkopplare 157
 Robotkraftomkopplare 157 utan skyddslock
Robotkraftomkopplare 157 utan skyddslock

RB-parameterberäknare 428

RB-parameterberäknare 428 utan skyddskåpa

RB-antennslavningsenhet 005
utan skyddskåpa

RB-avståndsslavningsenhet 006
utan skyddskåpa
 RB-frekvensslavningsenhet 007 (två enheter) en utan skyddskåpa
RB-frekvensslavningsenhet 007 (två enheter) en utan skyddskåpa
Robotbalk F5 054
Större bild
|
Allmänt
Robothjälpapparaterna
i flygplan J35F
och J35J hade till uppgift att på order från Radarsiktet
och/eller flygföraren preparera (förbereda)
RB27
och RB28 för det aktuella anfallet samt förmedla avfyringsimpuls
till robotarna.
Av de åtta apparaterna som ingick i beväpningssystemet är tre del av
Siktet S-7B3/31,
fyra del av Siktesradar
PS-01/-011
och en gemensam för båda radar och sikte.
Apparaterna i S-7B3/31
RB-programdonet
bestämde logiken och sekvenserna för prepareringarna inklusive avfyring
av RB27 och RB28. Prepareringarna
genomfördes i fem steg, Noshjul in, A-prep, B-prep, C-prep och
F-prep (avfyring) med en inbyggd klocka och en intervallometer som
referens. Noshjul in och A-prep berörde samtliga hängda RB och varade i
15 sek resp 9 sek. B-prep varade i 6 sek och C-prep tillsammans med
F-prep i 1,2 sek och berörde valda RB27/28. Varje prepareringsintervall
måste genomlöpas innan nästa kunde starta varför sammanlagd minsta total
tid från beslut att anfalla tills roboten lämnat flygplanet var 16.2 sek.
Vid siktesberäknade anfall startade resp prepareringar av
Radarsiktet S-7B
med signalerna A-tid, B-tid och C-tid. Start av C-prep förutsatte även
att föraren hade avfyringsknappen intryckt. Efter avfyring (F-prep) i
ett första anfall startade ny B-prep på kvarvarande valda RB för ett
uppföljande Andra anfall. Vid utdragen B-prepareringstid i > 56 sek
låste systemet i ett tillstånd ”Avbryt” och B-preparerade RB28 kopplades
bort p g a att dess kylsystem för målsökaren var förbrukat. B-preparerad
RB27 kunde väljas på nytt. Efter avfyring gavs även signal till PS01/011
som låste i följeprogrammet i 30 sek.
Vid visuella anfall med RB27 och RB28 startades alla
prepareringar manuellt från styrspaken.
Förändringar:
Möjlighet till Enkelskott samt förkortade prepareringstider (A-prep
3 sek och B-prep 3 sek) för RB28 infördes i början av 1970 och för RB27
från1986 (Hawée II). Medförde
snabbare tillgänglighet samt ökad visuell användning av resp RB via
gyrosiktet.
RB-kraftomkopplaren avkände och identifierade med logikkretsar
hängda RB27 (RR) och RB28 (IR) samt gav villkor för olika typer av kraft
till dessa. Ett tillståndet ”Yttre kraft” till RB startade vid Noshjul
in från programdonet och försåg alla RB med drivspänning till
målsökargyron och stryrautomatens rategyron. Vid A-prep från
programdonet inkopplades glödspänningar (de första 9 sek förhöjda) från
RB-balkarna till alla RB. Vid B-preparering från programdonet kopplades
om till ”Inre kraft” i valda RB varvid glödspänningsförsörjningen
övertogs av RB interna kraftkälla (RB-batteriet) samt låstes vapenvalet
fram t o m avfyring. Vid vapenval RR eller IR på Vapenpanelen valde
kraftomkopplaren dubbelavfyring av RB27 eller RB28 och vid vapenval ALLA
avfyrades alla hängda RB27/28.
Efter avfyring identifierades kvarvarande RB för B- och C- prepareringar
i ett Andra anfall.
Förändringar:
Möjlighet till Enkelskott och förkortade prepareringstider
möjliggjordes för RB28 genom att förse RB med låg glöd-spänning från
Noshjul upp i 15 sek. Vapenval ALLA ersattes med BLANDAT som medförde
att vingplacerad RB28 avfyrades tillsammans med något tidsfördröjd
kroppsplacerad RB27 i dubbelskott. Möjlighet till Enkelskott för RB27
(Hawée II) i enlighet med som för RB28.
RB-parameterberäknaren beräknade nödvändiga parametrar vilket gav
robotens styrautomat optimala egenskaper i sin styrfunktion för den
aktuella anfallssituationen vilket hade stor betydelse för god
träffsannolikhet. Parametrarna beräknades analogt med hjälp av data från
Datasystemet DS1 om egen fart och höjd samt från Radarsiktet S-7B3/31 om
målets relativa hastighet, antennhöjdvinkel och beräknad RB-gångsträcka
(gångtid). Dessa data omvandlas till digitala värden i tre separata
omvandlare vilka representerande tre olika delparametrar.
Delparametrarna omfattade:
-
Rå-parametern som
speglade enbart Flyghöjden.
-
Tau-parametern som
återgav RB-gångsträcka/gångtid.
-
Ny-parametern som var
en funktion av flyghöjden, flygfarten, relativa hastigheten resp
höjdskillnaden mellan målet och egna flygplanet.
-
Övriga
parametersprängningar för RRB27 utgjordes av ev zonrörsfördröjning
för verkansdelen och/eller fram/bakkantsföljning i avståndssystemet.
Processen genomlöptes i
tre moment; beräkning, utställning och sprängning. Beräkningarna
startade vid C-prep från programdonet. När beräkningen var klar
utställdes och sprängdes parametrarna i valda RB omedelbart före signal
(F-prep) avgavs för tändning av raketmotorerna.
Apparaterna i
Siktesradar PS01/011
RB-antennslavningsenheten slavade in valda RB27 eller RB28
målsökare till samma riktning som PS01/011 radarantennen.
Slavningsenheten hade en utgång för varje RB-plats och avgav sk A- och
B-term som funktion av radarantennvinkeln. Processen hade två sekvenser.
Vid radarlåsning startade vinkelberäkningen och vid B-prep från
programdonet startade utställningen med hastigheten 10 grader/sek som
begränsades vid 40 grader utställd RB-målsökare för att inte skadas mot
ändläge.
RB-avståndsslavningsenheten slavade in valda RB27 radarmottagares
avståndsport (fönster), så att den i tid överensstämde med PS01/011
avståndsstrob och därmed det från målet reflekterade radarekot.
Slavningsenheten hade en utgång för varje RB-plats. Funktionen
startade vid B-prep från programdonet och var klar efter ca 2 sek.
RB-frekvensslavningsenheten slavade in RB27
Lokaloscillatorklystron LO så att RB mottagarfrekvens överensstämde med
PS01/011 sändarmagnetrons frekvens. Fem förprogrammerade RB-frekvenser
kunde väljas på radarns Frekvenshållningsenhet.
Slavningen utfördes i två steg. Grovslavning av LO startade vid A-prep
från programdonet och påverkade samtliga RB27. Slavningen varade upp
till 9 sek beroende på hur mycket piloten varierat radarsändaren. Vid
B-prep startade Finslavningen och AFR-blandaren, en i varje
RB-balk jämförde LO frekvensen i valda RB27 med radarsändaren. Ev
avvikelse styrde avstämningen av LO till rätt RB-mottagarfrekvens vilket
tog ca 2 sek.
RB-riktkopplarna skulle fördela en del av PS01/011
magnetroneffekt till RB27 AFR-blandare.
Gemensam
hjälpapparat
Robotbalk F5
utgjorde ”lavett” för RB27 och RB28 vilka hängdes genom påskjutning
framifrån. RB inkopplades elektriskt till balken med ett hissbart
50-polig kontaktdon. Tre kontaktfjädrar för varje överföring
säkerställde full kontakt vid varje hängning. Balken anslöts till
flygplanets system genom skarvdon. I balken fanns transformatorer och
inkopplingsreläer för elektronrörens glödspänning och parametersättning
i RB samt AFR-blandaren för RB27.
Förändringar:
Möjlighet till Enkelskott och förkortade prepareringstider möjliggjordes
för RB28 och senare för RB27 (Hawée
II) genom införande av transformatorer för låg glödspänning.
Källor:
Beskrivning FPL J35J del 3, Beskrivning Sikte S-7B, Beskrivning Radar
PS01/011
Skrivet av Göran Hawée
Senast uppdaterad 2011-05-05
|