![]()
|
/---------------------------1999
|
||
Registrerutrustning vapenverkan J35F och J35JÖvningsrobot ÖRB27 Notis 2 |
|||
|
Vid anskaffning av jaktrobotar av Falcontyp från USA med svensk beteckning RB27 och RB28 till flygplan J35F och senare J35J skaffades även en utrustning för registrering av anfall utförda mot luftmål med dessa robotar. Utrustning benämndes ÖVNINGSROBOT ÖRB27 och hade även den utvecklats i USA. Vid följande tillfällen var registrering av anfall värdefulla:
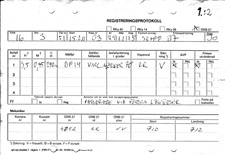
En stridsrobot RB27 eller RB28 preparerades före avfyring genom att skilda signaler tillförs den från det bärande flygplanets beväpningssystem. ÖRB27 tog emot preparerings- och avfyringssignaler från sikte S-7B3/31, slavningssignaler från siktesradar PS-01/011, från enheter i roboten själv samt vissa signaler som fanns på siktesradarns indikator. Signalerna avlänkade fokuserade ljusstrålar som registrerades på ljuskänslig oscillogramfilm. Flygföraren upprättade ett Registreringsprotokoll med grundläggande uppgifter som rått vid de anfall som genomförts. Filmen framkallades efter avslutad flygning med en speciell framkallningsutrustning. Utvärderingen skedde sedan med hjälp av för de olika kanalerna specifika mallar. Resultatet jämfördes sedan med förarens uppgifter och de normer som gällde för prepareringarna, flygförarens handhavande samt en stridsrobots skjutgränser.
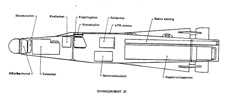
ÖRB27 utgjordes i grunden av en stridsrobot RB27 vilken plundrats på driv- och verkansdelar samt kompletterad med relälogik och Registrerutrustning för att spegla och registrera RB27/28 funktion och identifiering. Dess elektronik var också anpassad så att den var lika belastande gentemot det bärande flygplanets avioniksystem. Detta var till stor nytta vid de speciella regelbundna Beväpningskontroller som utfördes på flygplanets beväpningssystem.
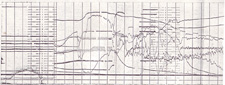
I ÖRB27 registrerades signalerna i totalt 31 kanaler, som tillsammans med en relälogik gav både direkt och indirekt information. Av dessa representerade 10 analoga signaler varav av 1 utgjorde referens vid utvärdering samt 21 digitala signaler vars närvaro och varaktighet hade olika betydelse. De analoga signalerna kunde identifieras i förhållande till varandra med hjälp av identifieringsluckor. Dessa var 0.2 sek långa och differerade i tid 0.2 sek samt uppträdde med 4 sek regelbundenhet.
Digitala signalernas systemfunktioner Antenngyrospänning till målsökarmotorn (2 kanaler). Visar tidpunkter och varaktighet för Förhöjd spänning (Kanal 28) resp Normal spänning (Kanal 29). ”Inre kraft” i roboten kopplas in (Kanal 14). Visar tidpunkt för Aktivering av robotbatteriet.
Styrsignalauktoritetens parameterberäkningar kopplas fram (13 kanaler). Visar tidpunkt för parametersättningarna och det digitala värdena på;
Bakkantsföljning på målekot kopplas in (Kanal 23). Visade Aktivering vid anfallsgeometri BAK.
Zonrörsfördröjning kopplas in (Kanal 24). Visar Aktivering vid anfallsgeometri FRAM eller höjd > 5000m.
Elektronisk störning in i målsökaren (Kanal 25). Visar tidpunkt och varaktighet för Aktivering av målföljning på störningen.
Tändsignal kopplas fram (Kanal 2). Visar tidpunkt för Aktivering av robotens raketmotor.
Radarlåsning etablerad (Kanal 26). Visar att radarn följer i avståndsled.
Analoga signalernas systemfunktioner;
Glödspänningen till robotarna elektronrör före ”Inre kraft” inkopplas (Kanal 1). Visade värde och varaktighet på;
Robotmålsökarlägets signalvärden koordinerade till horisontalplanet och respektive robotars hängningsplats efter ”Inre kraft” på:
Antennslavningsfunktionen för valda robotars målsökare (2 kanaler). Visade skillnaden i signalvärden mellan radarantennen och målsökaren i tippled (Kanal 13) och girled (Kanal 19) vid;
Frekvensslavningsfunktionen i valda robotars målsökare beroende på flygskede (Kanal 27). Visade robotmålsökarens avvikelse från och insvängningstid till den i radarn inställda robotfrekvens vid;
Målsökarmottagarfunktionens automatiska känslighetsreglering AKR. Visade värdet på Signaltillskottet från målekot vid målföljningen i fem sekunder efter avfyring.
Avståndsslavningsfunktionen i valda robotars målsökare beroende på flygskede (Kanal 18). Visade robotmålsökarens avvikelse från och insvängningstid till det av radarn inmätta målavstånd före avfyring.
Avståndsföljningsfunktionen i valda robotars målsökare beroende på flygskede. Visade skillnaden mellan radarns och robotmålsökarens avståndsuppfattning i fem sekunder efter avfyring.
Styrfelet inducerat av flygföraren gentemot siktets beräknade nominell inriktning (2 kanaler). Visade värdet på avvikelsen i sidled (Kanal 15) och höjdled (Kanal 17) på radarindikatorn.
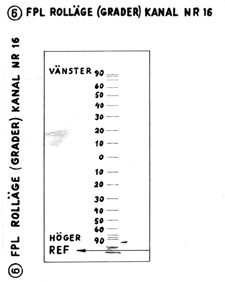
Flygplanets rolläge i förhållande till horisontalplanet (Kanal 16). Visade värdet på flygplanets rollvinkel.
Målavståndet (Kanal 30). Visade signalvärdet på radarinmätta målavståndet och indirekt närmandehastigheten till målet.
Referenslinje. (Kanal 31). Kalibreringsreferens för avläsningsmallarna för de analoga kanalerna.
Underhåll Tillsyn på ÖRB27 utfördes regelbundet vid A- och B-nivå vid flottilj. Översyn gjordes vid CVA robotverkstad.
Skrivet av Göran Hawée Senast uppdaterad 2011-03-15
Källor: Beskrivning ÖRB27, Utvärderingshandbok ÖRB27
|