Jaktrobot SKY FLASH
RB71
med semiaktiv radarmålsökare Notis 2
Bakgrund
När ett nytt svenskt jaktflygplan skulle projekteras i början av 1970-talet för
att ersätta J35F med jaktrobot
RB27 måste även denna robot
ersättas av en modernare typ som huvudbeväpning.
Härvid
undersöktes möjligheterna att på den utländska marknaden hitta en
lämplig robot. I USA fanns en jaktrobot Air Interception Missile
AIM-7 Sparrow med semiaktiv radarmålsökare. Denne började
produceras 1963 för leverans till USAF för beväpning av bl.a. flygplanen
F4 Phantom och F15 Eagle. Tillverkaren var Raytheon Co.
Sverige
börjad förhandla med USA redan i början av 1970-talet om att få
provskjuta AIM-7E Sparrow för anpassning till det nu beslutade
jaktflygplanen JA37 Viggen. Tre
provskjutningar med denna robot utfördes i Sverige. Beslut togs dock att
anskaffa en senare version av Sparrow, AIM-7F. Som konkurrerande
alternativ valdes en varianten från Storbritannien, benämnd XJ 521
Sky Flash som tillverkades av Hawker Siddeley Dynamics, HSD.
Efter grundlig undersökning och avväganden valdes Sky Flash för
beväpning av JA37.
Roboten Sky Flash fick beteckningen RB71 i Flygvapnet FV
och var alltså en modifierad variant av den amerikanska grundversionen
AIM-7E ovan och hade samma skal, yttre utseende, motor och
stridsdel som denna.
Utvecklingen av den brittiska Sky Flash startade i början av 1970-talet
och blev operativ 1978 i England. Robotens passiva målsökare av
monopulstyp utvecklades och tillverkades av Marconi Space and Defence
Systems, MSDS och stridsdelens zonrör av EMI Elektronics, EMIE, båda
underleverantörer till HSD samt hade förbättringar av övrig elektronik.
Målsökare hade även en bra störresistens gentemot aktiv (elektronisk)
och passiv (remsor) störning och kunde följa på mål under relativt svåra
förhållanden speciellt på låga höjder.
Jaktrobot RB71
Uppbyggnad
Roboten
var sammansatt av ett modulsystem med robotdelar fullt utbytbara
sinsemellan som medförde ett smidigt underhåll och bra och enkelt
hanteringen i en krigssituation.
Robotens elektronik bestod av statisk mikroteknik där integrerade
kretsar ingick som gav hög tillgänglighet i alla miljöer.
Som
kraftkälla användes dels anpassad elförsörjning från det bärande
flygplanet samt dels efter avfyring med snabbaktiverande Batteri och
Hydraulsystem.
Roboten
hängdes i en Robotlavett med vilken flygplanet genom kabling och
mångpolig kontakt försörjde robotens elektronik innan avfyring.
Funktion
RB71
anskaffades till flygvapnet för bekämpning av snabbt flygande
flygplanmål på alla höjder och på långa avstånd i alla väder och i
mörker. RB71 var försedd med en radarekodetekterande passiv (semiaktiv)
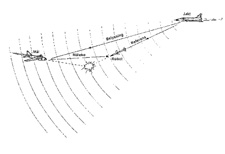
dopplermålsökare anpassad till CW (Continuous Wave). Roboten avfyrades
normalt under ett siktesberäknat
Genskjutningsanfall GA
vilket vid den beräknade yttre skjutgränsen övergick i
Jaktkurveanfall JK.
Målsökaren fordrade radarbelysning av målet. Sändaren för detta ändamål
utgjordes av en speciell Belysningssändare BES som ingick i det bärande
flygplanets Siktesradar
PS-46. Alternativt kunde den även styra med hjälp av eventuell elektronisk
störsignal av brus-typ från målet under gångtiden.
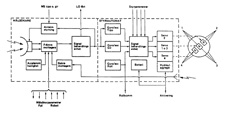
Före avfyringen måste roboten förberedas och färdigställas för
det aktuella skjutfallet. En del av detta gjordes under tiden fram till
avfyringen och styrdes av flygplanets
Centraldator
CD-107 och utfördes i
roboten via en Anpassningsenhet ANP-71. I CD utfördes under anfallet
kontinuerligt siktesberäkningar med stöd av måldata från siktesradarn
avseende målhastighet (måldoppler) och målutpekning (radarantennens
pekriktning) samt flygdata (höjd och fart) från primärdatagivare
(luftdatasystem). Även robotidentifiering samt information om robotens
tillstånd vad gäller kraftförsörjningen och frekvensavstämning
(grovslavning till belysningssändaren) inhämtades.
Vid avfyring av flygföraren startade snabberäkning av
parametervärden i CD för preparering av mål- och övriga flygfallsdata.
Prepareringar:
-
Hydraulaggregatet för
roderstyrning aktiveras
-
Robotbatteriet
aktiveras
-
Höjdparametrar
(påverkar förstärkningsfaktorn, dvs följe- respektive styrauktoritet
i målsökaren och styrautomaten)
-
”Simulerad doppler” (målhastigheten,
påverkar målsökarens följenoggranhet)
-
Antennutpekningsvinkeln (slavar ut målsökaren).
-
”Korthållsmod”
aktiveras vid behov (ökade förstärkningar, auktoritet i
styrkretsarna för målsökaren och styrautomaten).
Prepareringarna verkställdes av ANP-71 som sedan efter
klarsignaler från robotens olika delar (tid ca 2 sek) initierade
tändsignal till raketmotorn.
Efter avfyring (separation från flygplanet) drevs roboten fram
av en enstegs krutraketmotor. Robotens målsökare och styrsystem ledde
roboten på en
Kollisionskurs mot en beräknad träffpunkt,
dvs. enligt
principen syftbäringsnavigering (även kallad proportionell navigering).
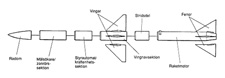
Den stabiliserades med Vingar i robotens bakre del och styrdes
aerodynamiskt med signaler från Målsökaren och Styrautomaten med Roder i
robotens mittre del. Flygningen korrigerades med hänsyn till målet
fart-, kurs- och höjdändringar och andra störningar i banan.
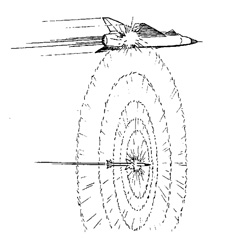
Vid målet eller i närheten av detsamma aktiverades robotens
Verkansdel, initierad från Anslagskontakter (vid direktträff) eller av
ett aktivt Radarzonrör (vid nära målpassage).
Stridsdelen bestod av ett zickzackformad länksystem av stålstavar, så
kallad continuous-rodtyp som expanderar åt alla håll när
sprängladdningen detonerar.
Tillverkning
British
Aerospace BAe var huvudleverantör med Marconi Space and Défense systems,
MSDS som underleverantörer för Målsökaren. SAAB tillverkade som
underleverantör till BAe och MSDS delar av roboten, bland annat
styrautomat och gyron. Roboten började tillföras svenska Flygvapnet från
1980.
Robotdata RB71
|
Längd: |
3,658 m |
|
Totalvikt: |
195 kg |
|
Total krutvikt: |
45,2 kg |
|
Stridsladdning: |
31 kg |
|
Motorkraft (krut): |
68.6 kg |
|
Motor brinntid: |
Kort sekvens kontra
total flygtid |
|
Max fart: |
> M 3 (flygplanets
fart inverkar) |
|
Max skjutavstånd: |
40 km (hög höjd) |
|
Min skjutavstånd: |
2-3 km (låg höjd) |
|
Målsökarens frekvensområde: |
X-bandet |
|
Hastighetsupplösning
vid målföljning: |
3,5 m/s |
|
Batterispänning |
28V |
Underhåll
Översyn på RB71
gjordes vid CVA robotverkstad.
Mer
om Robot 71 kan du studera på Robotmuseets hemsida
www.robotmuseum.se
Källor:
Skrivet
av Göran Hawée.
Senast uppdaterad
2022-06-14
|