|
Operativ tidsperiod
INNEHÅLL
Allmänt
Jaktflygplanet
Anfallstyper för jaktflygplan
Jaktkurveanfall JK
Kurvanfall KA
Hundkurveanfall HK
Direktanfall DA
Hissanfall HISS
Genskjutningsanfall GA
Anfallstyp för Jaktrobotar
Kollisionskursanfall KK
Flygledning av Jaktflygplan
Allmänt
Kurvledning KL
Direktledning DL |
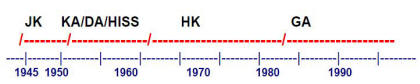
Taktiska
anfallstyper i Flygvapnet
Berörd utrustning:
Flygplan
J29,
J32,
J34, J35A,
J35B, J35D, J35F, J35J,
JA37
Sikten S-4,
S-6A,
S-6B,
S-7A-2,
S-7B3/31, CD107.
Jaktvapen AKAN, JRAK,
RB24,
RB27,
RB28, RB71,
RB74
Flygradar:
PS-42, PE-46,
PS-03,
PS-01,
PS-011, PS-46
|
|

Jaktkurveanfall JK

Kurvanfall KA

Hundkurveanfall HK

Direktanfall DA

Hissanfall HISS
|
Jaktflygplanet
För att rikta in ett vapenbärande jaktflygplan mot ett luftmål
krävs att hänsyn tas till ett stort antal faktorer. Av dessa har
anfallsriktning, framförhållning och avstånd till målet, jakten och
målets hastigheter, flyghöjd och flygbanor samt vapnets och projektilens
prestanda avgörande inverkan på träff-sannolikheten.
Tidigt i jaktflygets barndom fanns inga tekniska hjälpmedel tillgängliga
för inriktning och anfall genomfördes endast med flygförarens erfarenhet
och skicklighet. Efter hand som teknik-utvecklingen framskred, speciellt
under andra världskriget och tiden därefter, skapades sikten vars
riktmärken kunde korrigeras för dessa faktorer i analoga och senare
digitala kalkylatorer, uppbyggda med allt mindre komponenter samt med
förfinade tekniska lösningar.
Anfallstyper för jaktflygplan
Jaktkurveanfall JK
Denna anfallstyp anammades tidigt när ostryrda projektiler från
Automatkanoner AKAN och Jaktraketer JRAK skulle avfyras.
Den kom sedan att användas även för självstyrande RB.
JK som anfallstyp karaktäriseras av att jaktflygplanet riktas mot
en beräknad träffpunkt framför målet varigenom jakt-flygplanet kommer
att beskriva en krökt bana. Träffpunktens läge relativt målet är
beroende av målavståndet och syftlinjens vinkelhastighet, d v s
flygplanets svängrörelse. Förutsatt att målavståndet inmättes
kontinuerligt och är korrekt är skjutvillkoret uppfyllt i varje
ögonblick under anfallet.
JK kunde i vissa fall föregås av DA, GA eller KA,
se nedan, vilket bestämdes av den aktuella flygplantypens/versionens
siktesberäkningsprogram eller av ledningen från STRIL.
Kurvanfall KA
Denna anfallstyp började även den att användas tidigt, men kom till sin
fulla rätt först när självstyrande RB togs i bruk och med
jaktflygplan utrustade med siktesradar. KA var ett något
flexibelt anfall som var beroende av målets fart och jakt-flygplanets
och vapnens prestanda. Utmärkande för KA var dock att det började
med jaktflygplanets anflygning 90 grader tvärs målbanan varefter
inflygningssvängen gjordes med förhållning till målet.
Anfallet kunde genomföras med visuell- eller radarföljning och/eller med
ledning från STRIL. Profilen standardiserades allteftersom, så
att KA började med målet på 20 km avstånd och ca 20-30 gr ut i
sida samt med fartförhållandet jakt/mål på 1 /1,2. Vid målavstånd 12-8
km beroende på bl a fart-förhållandet började insvängen (kurvan) mot
målbanan med ca 15 gr förhållning mot ett läge ca 2-3 km bakom målet.
Förhållningen påskyndade anfallet och var specifikt för KA.
Anfallet avslutades sedan i HK eller JK beroende på vilket
vapen som valts.
KA
föregicks i allmänhet av KL från STRIL,
se nedan .
Hundkurveanfall HK
Anfallstypen användes endast vid anfall med RB när dess
målsökare var fixerad i siktlinjen före avfyring. Detta gällde såväl vid
visuell inriktning som när radarmålföljning kunde etableras. HK
kännetecknades av att jaktflygplanet hela tiden riktas direkt mot målet
och speglar en hunds synintryck och beteende när den jagar ett
byte. Härvid kom jaktflygplanet att beskriva en krökt bana.
Förutsatt att målföljningen sker kontinuerligt är skjutvillkoret
uppfyllt i varje ögonblick under anfallet.
När RB lämnat jaktflygplanet styr de med KK mot målet, se
nedan.
HK föregicks generellt av ett KA, se ovan, vilket i
huvudsak bestämdes av flygföraren själv eller med ledningen från
STRIL.
Direktanfall DA
Denna anfallstyp kunde genomföras oavsett riktning mot målet. DA
började komma till användning när målen antogs be-styckade med defensiva
vapen och utfördes då med visuell inriktning och med JRAK. Inom
DA fanns en tid även be-greppen Tvärsanfall och Framifrånanfall
vilka profilerade deras specifika anfallsriktning. Allteftersom
jaktflygplanen utrustades med målföljande siktesradar och sofistikerade
beräknings-kalkylatorer i sin avionik genomfördes DA med stor
precision antingen med ostyrda JRAK eller med RB utrustade
med målsökare som kunde slavas till siktesradarns antenn före avfyring.
DA är i grunden en modifierad form av ett KK, se nedan.
Med KK avses ett anfall, som karaktäriseras av att jaktflygplanet
och målet flyger på raka banor mot en punkt, i vilken de beräknas
kollidera med varandra. DA skiljer sig dock ifrån detta, genom
att jaktflygplanet i stället styrs mot en punkt, i vilken
projektilerna beräknas kollidera med målet. I DA kommer
jaktflygplanets anfallskurs och kollisionskurs således inte att
sammanfalla, eftersom projektilerna har avsevärt högre hastighet än
jaktflygplanet. Anfallsberäkningarna för DA kräver etablerad
radarmålföljning i avstånd, höjd och sida för att styrinformationerna
och den predikterade tidpunkten för av-fyring av projektilerna ska bli
noggrant angiven.
När robotvapen användes i DA övergick siktesberäkningarna till
JK när nominell (förutsedd) skjutpunkt passerades, s k JK-koppling.
Kombinationen av anfallstyperna DA / JK be-nämndes därför också
”Dubbelanfall”.
När RB lämnat jaktflygplanet styr de med KK mot målet, se
nedan.
DA föregicks generellt av DL från STRIL, se nedan.
Hissanfall HISS
HISS var en variant på DA eller GA, se nedan, där
siktets beräkningar även tog hänsyn till skillnaden mellan
jaktflygplanet och målet i lodplanet när inflygningen mot målet utfördes
från lägre höjd. Vid lämplig tidpunkt styrs flygplanet till stigning
(hissar) varefter avfyring initierades som vid DA eller GA.
Vid HISS-anfallet når jaktrobotarna mål som flyger betydligt
högre än jaktflygplanet. Vidare får robot med radarmålsökare en
fördelaktigt större reflekterande målyta.
Genskjutningsanfall GA
Detta anfall var i grunden
identiskt med DA men efterföljande JK d v s ett
”Dubbelanfall”. Den ändrade benämningen hade delvis en mer modern prägel
men berodde också på att den efterföljande JK-kopplingen inträdde
redan vid jaktrobotarnas beräknade yttre skjutgräns, d v s betydligt
tidigare än den i DA beräknade optimala avfyringstidpunkten.
|
|

Kollisionskursanfall KK
Klicka här för större bild

Kurvledning KL
Klicka
här för större bild
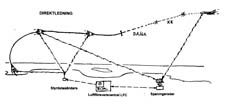
Direktledning DL
Klicka här för större bild
|
Anfallstyp för Jaktrobotar
Kollisionskursanfall KK
Jaktrobotar hade generellt en avionik programmerad för att styra
projektilen kortaste vägen till målet enligt principen
syftbäringsnavigering (även kallad proportionell navigering), i dagligt
tal ”syftbäringsprincipen”. Denna navigering åstadkoms med hjälp av
samverkan av mållägessignaler, målsökargyrots egenskaper, RB
avionik samt dess styrförmåga.
RB målsökargyro är under hela gångsträckan riktad mot målet där
de parallella linjerna mellan robotens bana och målbanan representerar
siktlinjen i olika ögonblick. Om siktlinjens rymdvinkel ändras kommer
målsökarens gyro att avvika från siktlinjen, ett följefel och en
felsignal uppstår som via ett reglersystem ställer om gyrot till den nya
siktlinjen. Felsignalen matas även till styrsystemet som svänger roboten
till den nya kollisionskursen. Samma förlopp kommer till stånd om målet
ändrar sin bana. Genom att styrsystemet endast reagerar på följefel och
inte på målsökarens verkliga läge kommer roboten att ha en viss
framförhållning. RB svänghastiget blir därför proportionell mot
siktlinjens förändring. Proportionalitetskonstanten, även kallad
navigationskvot bör ligga inom området 3-5 för att ge ett stabilt system
och bestäms av målsökarsystemets totala förstärkning samt aerodynamiska
parametrar.
Exempel på stora korrigeringar är vid avfyring av roboten i HK
eller om målet gör undanmanöver under RB gångtid.
Flygledning av Jaktflygplan.
Allmänt
För att beskriva ett typiskt jaktuppdrag, även kallad ”jaktcykel”
för jaktflygplan i samverkan med STRIL skapades i flygvapnet en
strategisk bild, en Jaktprofil som visade de olika systemens
roller från start till landning. Profilen gällde i stort för samtliga
jaktflygplantyper och versioner under tiden när stora bomb-målen skulle
uppträda under ”Kalla krigets” dagar. Ledningsinformationen från marken
överfördes från en Radarjaktledare Rrjal, först med
talkommunikation och senare mer diskret som
Styrdata
i digital form. Jaktprofilen beskrev ordningsföljden på de olika
momenten som skulle utföras av markorganisationen och flygföraren i
jaktflygplanet.
Där visas bl a det kritiska avsnitten när flygföraren tog över
målföljningen (”ledningen”) varefter han genomför anfallet på egen hand.
Härvid utvecklades i huvudsak två typer av ledningsprofiler.
Kurvledning KL
Denna ledningsform togs tidigt
i bruk av STRIL för att förenkla och standardisera förfarandet
under jaktflygplanets anflygnings- och målspaningsskede mot en punkt 90
grader tvärs målbanan, där flygföraren själv kunde fortsatta med ett
KA mot målet. KL påbörjades när Rrjal fick kontakt med
jaktflygplanet på sin radarskärm PPI (Plan Polär Indikator)
varefter Rrjal själv manuellt eller senare i tiden med hjälp av
datorer beräknade närmaste vägen för jaktflygplanet till sitt
utgångsläge för KA. Den framräknade rutten överfördes till
flygföraren som styrde flygplanet efter de kursangivelser som meddelades
från Rrjal.
Direktledning DL
DL som ledningsform togs även det tidigt i bruk av STRIL
för att understödja jaktflygplanet att komma till ett optimalt läge för
anfallstyper som DA, JK och HK. DL
genomfördes och meddelades jaktflygplanet av Rrjal på samma sätt
som vid KL.
Skrivet av Göran Hawée
Senast uppdaterad 2015-10-18.
|
|