FPL35 Draken, SAAB 35 - Det första
svenska Systemflygplanet för jaktuppdrag i överljudsfart.
System J35BD
Skribent
Göran Hawée Uppdaterad 2018-08-22
Bakgrund
Under andra
världskriget utvecklades jaktflyget för att bekämpa fientliga
bombflygplan, som i huvudsak verkade med insatser mot mål med stor utbredning
som industriområden men även bostadsområden i terroriserande syfte. Även
eskorterande jaktflyg skulle i viss mån kunna bekämpas varför jaktflygplanen
måste ha allsidiga prestanda. De utrustades även för attackuppdrag om vapen
fanns tillgängliga och kunde anpassas till flygplanen. Jaktflygplanen var därför
försedda med kanoner och raketer och senare även med målsökande robotbeväpning.
Flygvapnets jaktförsvar utvecklades under 1940- och till mitten av 1950-talet
med en flora av utifrån anskaffade jaktflygplan som J26, J28 och J33 samt de
svensktillverkade J21, J22 och J29. Även efterföljarna, den svenska J32B och
engelska J34 bidrog till denna utveckling samt blev vägledande för att senare
även J35 Draken konstruerades för samma ändamål.
Hotbilden, d.v.s. Sovjetisk invasion med bombflyg över Östersjön på
hög höjd och med kärnvapen var högst påtaglig under det kalla krigets första
hälft. Därför var det viktigt att jaktflyget hade prestanda och beväpning för
att kunna nå och bekämpa detta hot.
 |
 |
|
Sovjetiskt bombflygplan Tu-16 BADGER för kärnvapen från
1955 |
Sovjetiskt bombflygplan M-4 BISON för kärnvapen från 1955 |
Parallellt med utvecklingen av J35 Draken pågick vid Kungliga
Flygförvaltningens KFF Robotbyrå ett intensivt utvecklingsarbete på en
målsökande jaktrobot (RB321), som avsågs bli den första flygburna jaktroboten
för direktanfall, d.v.s. bekämpning av målet på mötande kurs. Utvecklingsarbetet
avbröts dock och som ersättning anskaffades amerikanska IR- och radarmålsökande
jaktrobotar till Drakenflygplanen vilka kunde börja användas från 1963
respektive 1965.
Ersättaren till jaktflygplanet J29 Tunnan började planeras redan
1949. Flygvapnets mål var alltså ett överljudsflygplan som var prestanda- och
elektronikmässigt optimerat som vapenplattform för direktinsats med robotvapen
mot snabba, stora mål på hög höjd samt vara utrustat för flygning och bekämpning
i alla väder och mörker av en besättningsman. Det skulle även vara anpassat till
det unika svenska krigs- och vägbassystemet
BAS 60 och till en markorganisation
med ett utvecklat stridsledningssystem
STRIL 60.
INNEHÅLL
Flygplan 35 Draken
Allmänt
System J35 i symbios med Stridsledningssystemet STRIL 60.
Inledning
STRIL 60 i samarbete med System J35BD.
Allmänt
Jaktcykeln
Allmänt
Den första
prototypen av flygplan Draken, 35-1 - röd U flög den 25 oktober
1955. Totalt tillverkades 615 Saab 35 Draken i nio versioner. Av dessa utgjorde
19 st. provflygplan och 63 st. exporterades. Totalt beställde KFF 533 Saab 35,
varav fem jaktversioner till Flygvapnet. Dessa jaktflygplan, J35A, B, D, F och J
kom att nyttjas operativt vid 10 flygflottiljer och bestå av 24 divisioner
Drakenflygplan.
J35A avsågs att bli det första systemflygplanet i Draken-familjen.
Så blev det dock inte på grund av att flera svenska underleverantörer av delsystem
inte fick fram utvecklade utrustningar i tid, se
J35A Krigsfunktion.
|
 |
 |
|
Provflygplan 35-1 landar
efter första flygningen |
J35B med två JRAK-kapslar och
två RB24B |
J35B beställdes som uppföljning till leveranserna av J35A, i 73
exemplar vilka skulle vara utrustade med elektroniksystem som från början var
planerad för Draken, d.v.s. dels att kunna genomföra direktanfall mot mål i alla
väder och mörker samt dels ledas mot målen med digital dataöverföring via radio
utan tal. Flygplanets grundläggande systemutformning hade beslutats tidigt under
projekteringen på 1950-talet och styrts av samma hotbild som för J35A, d.v.s.
bekämpning av bombflygplan med kärnvapen på mötande kurs på hög höjd.
Fortfarande saknades dock jaktrobotvapen för direktanfall och ersattes nu
istället med ostyrda jaktraketer. Dock levererades samtliga J35B i ofullständigt
skick men var aktiva som dagjakt vid taktiska uppdrag under beteckningen J35B´
(prim). Samtliga dessa blev sedan fullt utrustad
J35B från 1964 vid SAAB.
Underrättelser hade nu givit vid handen att bombmålens maximala fart hade ökat
till M 1,5 och en starkare motor behövdes för att Draken även skulle kunna ”jaga
ikapp” målen för bekämpning.
J35D utrustades därför med en starkare motor och kunde ta mer bränsle men var
systemmässigt lika utrustad som J35B.
J35D i sitt slutliga serieutförande med komplett elektronik flög för första
gången 28 augusti 1962. 120 J35D beställdes i första skedet i delserier som
J35B2, J35D1 och J35D2, vilka levererades i omgångar från maj 1963 till maj
1965. Även de första två delserierna som J35B, i mer eller mindre ofullständigt
utförande men fullt användbart i dagjaktuppdrag. Av dessa ombyggdes första
delserien 30 J35B2 till S35E. Den andra delserien J35D1 kompletterades vid
Centrala verkstäder och totalt 90 fullt utrustade J35D1 och J35D2 slutlevererade
1968 med beteckningen J35D.
|
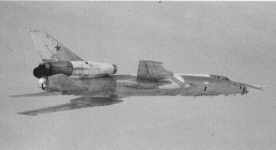 |
 |
|
Sovjetiskt bombflygplan Tu-22 BLINDER för överljudsfart
till M1,5 och med kärnvapen från 1963 |
J35D med fyra RB24B |
J35 Drakens olika versioner skapades, med hjälp av den begynnande moderna avioniken *) till ett integrerat System 35, (radio, olika radar och sikten samt
flygdatasystem sammankopplade) som tillsammans med STRIL 60-systemet (via
radarkontakt och radiosamband) skulle samarbetade för att optimalt nyttja
jaktflygplanen i alla väder och mörker i hela dess taktiska register. Denna
”resa” som jaktflygplanet m h a STRIL 60 och en där ingående Radarjaktledare
RrJAL skulle göra från i princip start till landning i ett jaktuppdrag, fick
tidigt benämningen Jaktcykel (eng cycel = period). Mången personal av olika
kategorier var involverade under denna ”cykel” för att jaktuppdraget skulle
kunna genomföras på ett framgångsrikt sätt. Där ingick ledningspersonal i
Luftförsvarscentralen Lfc, piloter i flygplanen samt flygplantekniker för
service- och felavhjälpande underhåll på System J35. STRIL 60-system hade alltså
en stor roll i jaktstrategin vid ledningen av jaktflygplanen fram till ett bra
utgångsläge där jaktens egna målinmätningssystem MIS kunde ta över samt vid
återflygningen till basen.
*) Avionik är en försvenskning av det engelska uttrycket avionics, som bildats
av de två orden aviation electronics, vilket motsvarar flygelektronik på
svenska.
En allmän redogörelse om FV-s stridsledningssystems uppbyggnad och funktion kan
studeras i speciell artikel om
STRIL 60.
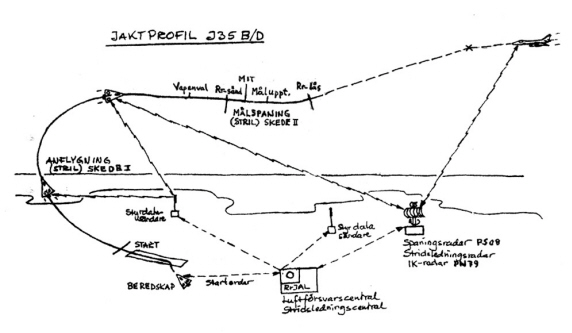
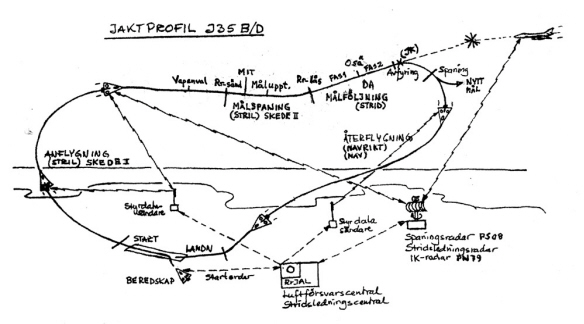
För att åskådliggöra jaktcykeln skapades en pedagogisk överblicksbild av ett
stridsuppdrag från start till landning, en s.k. Jaktprofil för att alla inblandad
personal skulle få en bra uppfattning om sin egen och andras roll(-er) och
funktion(-er) i sammanhanget.
Jaktprofilen för J35BD präglas av att flygplanet kunde uppträda offensivt i ett
första Direktanfall DA på kurs tvärs med målets flygbana. Detta utfördes som
huvudbeväpning med svensktillverkade 7.5 cm Jaktraketer JRAK i två kapslar om 19
st. i varje kapsel. Med detta uppnåddes nu delvis det tillstånd som tanken var
från början att Drakenflygplan kunde bekämpa mål utan att behöva uppsöka
bakifrånläge. Som andrahandsvapen användes från USA inköpta IR-sökande
jaktrobotar RB24B Sidewinder eller 30 mm Automatkanoner AKAN m55 med vilka målet
måste anfallas mer eller mindre i bakomläge för att lyckas med ett Kurvanfall KA
(RB24B) respektive Jaktkurva JK (AKAN).
Jaktcykeln
Hela detta förlopp indelades i olika flygfaser, eller s k
Skeden. Dessa fick
speciella namn och användes av alla inblandade människor såsom STRIL-personal,
piloter och flygplantekniker. De användes även som elektriska villkor i logiska
kretsar i kalkylatorer och datamaskiner på marken och i flygplanen. Detta var
till stor hjälp för att åskådliggöra Jaktcykeln i dess alla delar under
uppdragets genomförande.
|
 |
 |
|
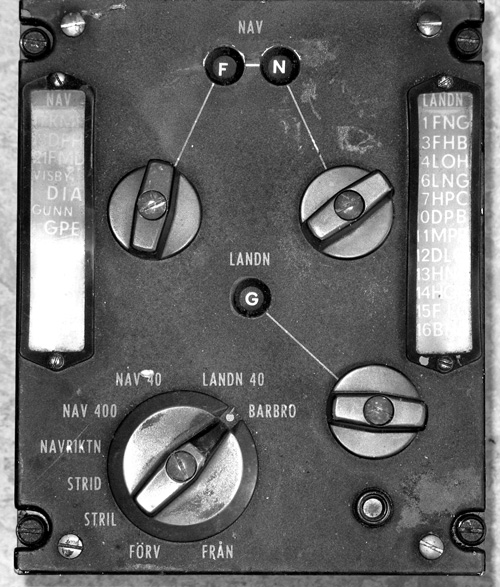
Fronten på två typer av PN-59 |
Manöverlåda ML till PN-593 |
I System J35BD ingick ett Datasystem typ 2 DS-2 som innehöll Luftdataenhet LD
för beräkning av flyghöjd och fart samt en analog Datacentral DC vilken bl.a.
ombesörjde ett stort antal logiska omkopplingar som var beroende av vilket Skede
i System J35B/D som för tillfället gällde. Styrningen av skedena gjordes i
huvudsak från Navigeringssystemets PN-593 Manöverlåda ML av piloten.
Förutom PN funktionsväljare fanns på PN ML även tre omkopplare, två för NAV och
en för LAND vilka påverkade både kodning och frekvensval för frågor och svar
mellan flygplanets utrustning och olika geografiskt utspridda markfyrar i
Sverige för navigering och landning.
Med PN ML i läge STRIL kunde flygplanet ta emot och detektera digitala
Styrdatameddelanden från RrJAL. Dessa diskreta meddelanden var adresskodade och
kunde sändas ut från någon av de mer än 40 i Sverige strategiskt placerade
Styrdatasändare med hög uteffekt (10 kW) och på valbara kanalfrekvenser på
VHF-bandet (103 – 149 MHz). Meddelandena sändes i seriebinär form och innehöll
103 bitar/meddelande. Utsändningshastigheten var 3000 bitar/sek vilket
medgav ca 26 meddelanden/sek.
|
Varje styrdatameddelande till J35BD innehöll följande information:
Startkod
Synkronisering och identifiering av meddelandet.
Skede
Skede I - Anflygning eller Skede II – Målspaning.
Adress
Unik kod för jaktflygplanets anropssignal.
Höjd
Målets flyghöjd.
Kommando
Olika fasta klartextkommandon från Rrjal.
Kurs
Kursen mot mål.
Bäring
Riktningen till målet.
Avstånd
Avståndet till målet.
|
Nedan följer en beskrivning av händelserna i flygplanets operativa delar i avioniksystemen i de olika Skedena.
Texten inom parentes är inställda läget på PN ML.
Skedet började när piloten anmäler flygplanet klart i ”Högsta beredskap” till Lfc.
Under detta skede var markström anslutet via flygplanets markanslutning från ett
Markströmsaggregat MAGG eller senare ett Beredskapsaggregat BRAGG. Flygplanets
Huvudströmställare var i läge TILL men Flygmotorn var inte i gång . Piloten satt
i kabinen och hade vidtagit de nödvändiga åtgärderna för att snabbt kunna
starta. Alla avionikutrustningar som fordrade tid för uppvärmning var strömsatta
i sina respektive uppvärmningslägen för att inom kort tid kunna tas i bruk vid
startorder. Berörda system var Flyglägesinstrument FLI (TILL), Styrautomat SA
(TILL), Flygradio FR (TILL), Datasystem DS och Navigeringsradar PN (FÖRV),
Siktesradar PS (KRAFT TILL) inklusive Siktet S samt Igenkänningsradar IK (BER).
Ingen kylluft för avioniken behövde vara ansluten.
Piloten hade direkt och radiotyst dubbelriktad kommunikationsförbindelse med
Luftförsvarscentralen Lfc och den egna basens Kommandocentral KC via ett
Trådjaktledningssystem, ”Markslingan” som var uppbyggt enbart med kabel vilket
var nödvändigt ur avlyssnings- och störningssynpunkt. Piloten kunde även höra
kommunikation med andra flygplan som var anslutna till slingan. Flygplanet var
fulltankat, vid behov med Fälltankar FT samt med en beväpning enligt
flygplanversionens huvudalternativ.
Efter modifieringar i flygplanens luftsystem i slutet av 1960-talet kunde avioniken kylas och kabinutrymmet uppvärmas vintertid eller kylas vid varma
sommardagar från BRAGG.
Vid läge ”5 min beredskap” (eller längre tid) var piloten placerad i värn.
Flygplanet var ej strömsatt. För att förhindra fördröjning av starten när
startorder kom startade Mekanikern avioniken enligt ovan och gjorde de
förberedande åtgärderna samt övervakade kabinen till piloten äntrade kabinen.
|
 |
 |
|
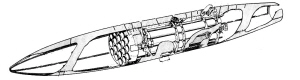
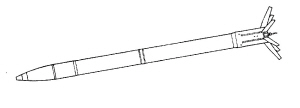
JRAK-kapsel m56 med utrymme för 19 7,5 cm JRAK i kapsel. |
7,5 cm JRAK m56 med
utfällbara styrfenor. |
|
 |
 |
|
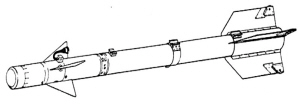
Jaktrobot Sidewinder RB24B från 1964 |
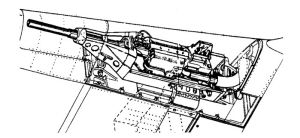
30 mm Automatkanon AKAN m55 |
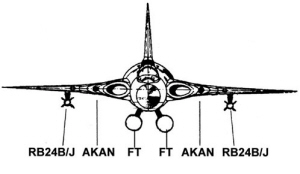
Beväpningen utgjordes för J35B/D huvudalternativ av två JRAK-kapslar, monterade
på Y-balk på J35B och på separata balkar på J35D under flygkroppen för ett
första DA samt två RB24B monterade på lavett på separata balkar under respektive
vinge för ett uppföljande KA. Från 1977 ersattes RB24B med RB24J som var en
modifierad och uppdaterad variant i Sidewinderrobot-familjen. Som ytterligare
alternativ fanns AKAN med 100 skott i respektive magasin för JK-anfall. Om
Fälltank FT var monterad under flygkroppen var två RB24B under vingarna den enda
yttre vapenlasten.
|
|
 |
|
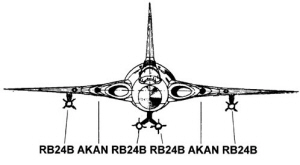
Olika vapenalternativ J35B |
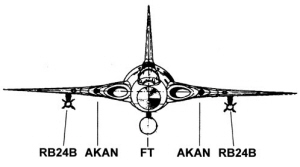
Olika vapenalternativ J35D |
|
 |
 |
|
Olika vapenalternativ J35B med FT |
Olika vapenalternativ J35D med 2 FT |
Som riktmedel för beväpningen hade SAAB utvecklat ett Sikte S för allvädersbruk
vilket byggde på målinformation från en av LME utvecklad Pulssiktesradar PS. Som
komplement i S fanns också ett optisk Gyroreflexsikte grundat på visuell kontakt
med målet. Tillsammans med PS kunde S användas i DA med JRAK, i JK med AKAN samt
i KA med RB24. Med Gyrosiktet kunde anfall i JK utföras med AKAN och JRAK samt i
HK med RB24. Dessa alternativ utgjorde S grundkopplingar och benämndes
Normalkoppling i det fall inriktningen skedde med hjälp av målinformation från
markledning STRIL och styrinformationer från S baserat på måldata från PS som
presenterades på PS indikator samt Gyrosikteskoppling baserat på visuell
målinriktning med hjälp av S optiska del.
Skedet började när startorder gavs från Lfc av Trådjaktledaren TRÅJAL till
jaktflygplanen i Beredskap. Beslutet hade tagits av Jaktledaren JAL på grundval
av att fientliga målekon uppträtt på spaningsradarns PPI-indikator. (Plan Position Indicator). Piloten startar flygmotorn och när huvudgeneratorn
kopplades in efter 10 -15 sek drar mekanikern bort markströmskällan och
trådslingans kontakter samt bromsklossar.
Under utkörning till start vidtar piloten åtgärder för mottagande av
styrdatameddelande från STRIL 60 med att ställa PN ML i läge STRIL. Han valde
även anbefalld STRIL-radiomottagarfrekvens på reservradio FR-14 Mottagare M.
Även i ordinarie Sändare/Mottagare FR-13 Manöverlåda ML hade piloten själv
skiftat Kanalförväljare, kallad ”spaden” för eventuell talkommunikation med
STRIL eller styrdatamottagning om han av annan orsak växlat till reservläge RES för
FR-13 .
|
 |
 |
|
FR-14 Mottagare med frekvensväljarrattar. |
FR-13 ML med bl. a. KV i mitten och Kanalförväljaren,”spaden” till höger.
|
Från första leveransen 1964 och under de 15 följande åren moderniserades
radiosystemen i omgångar.
Från 1969 ersattes FR-14 M av FR-21 Sändare/Mottagare, betecknad Sändtagare ST.
Från 1974 utrustades J35D (J35B hade då avvecklats) med FR-21 Manöverenhet ME2
som tillsammans med en Signalanalysator SA och en förprogrammerad Programpropp
PP vid speciellt val, automatiskt sökte efter fullgod signal för
dataöverföringen bland 16 olika förvalda styrdatasändarfrekvenser inom en av
fyra STRIL-sektorer i Sverige. Sektorerna utgjordes av Sektor Syd SeS, Sektor
Mitt SeM, Sektor Nedre Norrland SeNN och Sektor Övre Norrland SeÖN. För dessa
fanns färdigt programmerade PP som medföljde flygplanen vid ombasering. Även
manuell frekvensinställning kunde ske.
|
 |
 |
 |
|
FR-21 ST med Frekvensväljarrattar. |
FR-21 ME2 med KV (knappar och vred) för val av STRIL-frekvenser
och + knapp
för automatsökning av16 olika styrdatasändare. Programpropp nere till vänster |
FR-21/21
ME1 med KV för STRIL i nedre raden vilka benämndes med siffror |
Från 1976 utbyttes radiosystemet i J35D ännu en gång till ett komplett
FR-21/21-system med en gemensam ME1 med Kanalväljare KV för styrdatamottagning
och kommunikation. STRIL-kanalerna betecknades med siffror för att särskilja
från talkanalfrekvenser som betecknades med bokstäver. För FR-21/21 ME krävdes
omprogrammerade frekvensstavar vilka fanns klara för snabb ändring i flygplanet.
Alternativt kunde STRIL-frekvenser väljas manuellt på FR-21 datamottagare genom
intryckning av ”minus”-knappen i samma rad.
|
 |
|
IK ML med FV, Kodväljaren,
Testströmställare och Indikeringslampa |
Piloten ställer IK Manöverlåda ML i läge TILL på Funktionsväljaren FV samt
ställde dess Kodväljare i anbefallt läge. Han
gör en snabb test av IK-funktionen med hjälp av en två-läges Testströmställare
”KONTROLL” och en Indikeringslampa.
|
 |
 |
|
Radarpanel RP |
Vapenpanel VP |
PS och S startar automatiskt 30 sek efter det flygplanets generator kopplats in
och markströmskällan avlägsnats, förutsatt att 180 sek förflutit från det PS
strömställare KRAFT tryckts in på Radarpanelen RP. Vid behov ställer piloten
även in PS indikatorns symboler och ljusstyrkan för S optiska siktesbild med
hjälp av reglage på RP och Vapenpanelen VP.
|
 |
|
J35B med robotar RB24B och Fälltank FT startar från vägbas i trakten av Heby. |
Piloten drar på motorvarvet och tänder EBK och lättar efter ca 20 - 30 sek och
en knapp kilometer på startbanan samt börjar svänga och stiga mot beordrad kurs och
flyghöjd. Vid infällning av landställen kopplas markspärrarna för
beväpningssystemens el-kretsar bort.
|
 |
|
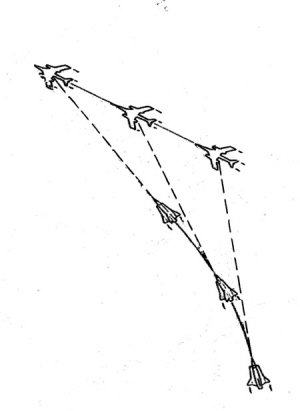
Jaktprofil för Direktledning DL för System J35BD
under Skede START, SKEDE I och
SKEDE II. |
Detta skede startar när jaktflygplanet lättat. När RrJAL, som nu övertagit
ledningen av jaktflygplanet identifierade detta på sin radarindikator PPI och
fått rätt IK-svar från flygplanet på fråga om dess identitet, d.v.s. anropssignal,
beordrar han omgående mål- och jaktföljning med hjälp av följesymboler ”låsta”
på jakteko och måleko. Till hjälp hade han en Målobservatör MÅLOBS. STRIL-s
avancerade stridsledningsdator återmatade sedan till RrJAL-s PPI den beräknade
optimala flygbanan till utgångsläge för anfall med JRAK, d.v.s. DA tvärs målets
flygbana.
RrJAL överförde sedan styrdata till flygplanet, genom val av olika styrvillkor, måldata och kommandon som skulle ingå i styrdatameddelandet och sedan via
utsändning från valda styrdatasändare på de anbefallda STRIL- radiofrekvenser. I
flygplanet togs styrmeddelandena emot, antingen via en Rundstrålande antenn
eller vid behov och val av piloten, via en Bakåtriktad antenn som minimerade
påverkan från fiendestörning mot FR datamottagare. I FR detekterades signalerna
och i Flygdatautrustningen FD Programenhet omvandlades meddelandet till digitala
”1-or” och ”0-or” varefter dessa i FD Registerenhet omvandlades till analoga
signalvärden. I DC omvandlades sedan signalvärdena från FD till representativa
analoga elektriska spänningsvärden vilka styrde presentationer på olika
instrument och indikatorer i flygplanets kabin.
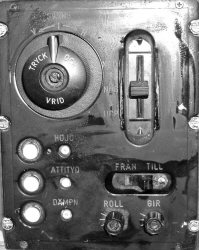
För att underlätta den fortsatta anflygningen kopplade piloten in STYRNING
(Autopilot) på SA Manöverpanel MP för J35B eller ATTITYD (Autopilot) på SA
Manöverenhet ME i J35D varvid automatisk attityd- och kurshållning erhölls samt
eventuell styrning av flygplanet behändigt kunde ske med en Svängratt och en
Upp/Ned-reglage på SA Manöverlåda ML i J35B alternativt SA ME i J35D. En finess
fanns i SA i J35D var att kunna välja Mach-hållning vilket senare under
1970-talet utbytes mot HÖJD-hållning.
Vid snabba justeringar av flygläget kunde piloten, med en Spaktangent ST på
Styrspaken SS koppla ned SA (Autopilot) för direkt flygning med styrspaken via
flygplanets grundstyrsystem.
|
 |
 |
|
SA-51 MP med strömställare samt SA ML med styrreglagen |
SA-05 ME med strömställare och styrreglage |
Informationen i Styrdatameddelandet ledde jaktflygplanet till ett utgångsläge
för ett DA med JRAK och förfarandet kallades Direktledning DL. Vid anfall med
RB24B ledde informationen till utgångsläge för KA eller JK vid anfall med AKAN
eller JRAK. Ledningsförfarandet i de sistnämnda fall benämndes Kurvledning KL.
DL medförde att jaktflygplanet inledningsvis leddes i en parallell bana med
målet på kontrakurs 180 grader och avskilt i avstånd c:a 10 km.
Tiden fram till nästa skede varade tidsmässigt olika länge beroende på hur fort
jaktflygplanet kunde stiga till lämplig höjd och avstånd för övergång till nästa
skede i jaktcykeln. Vid höghöjdsmål skedde stigningen i etapper eller direkt
till ca 10 km meters höjd där jaktflygplanet planade ut och där
atmosfärstemperaturen var som lägst och dragkraftstillskottet var som störst.
Piloten accelererade sedan flygplanet och ökade farten samt steg mot högre målhöjder.
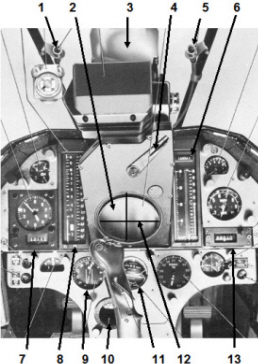
All information till piloten från STRIL 60 var koncentrerad på indikatorer runt
radarindikatorn på instrumentpanelen i kabinen för att piloten skulle få
optimalt nyttjande av all väsentlig information under den taktiska flygningen.
|
 |
|
1. Kollisionsvarningslampa
Vänster
2. Radarindikator
3. Reflexsikte,
visuell inriktning
4. Reglage
för radarindikatorbild i reflexsiktet
5. Kollisionsvarningslampa
Höger
6. Avstånd-Höjd-Kommando
AHK-indikator
7. Höjdindikator
(marktryckskompenserad)
8. Mach-Fart
MF-indikator
9. Kursindikator
med Styrkursvisare
10. Kursinställare
11. Horisontindikator
12. Styrindikator
med Sid- och Höjdvisare.
13. Flyghöjdinställare
FHIS
|
|
| Instrumentpanel J35BD |
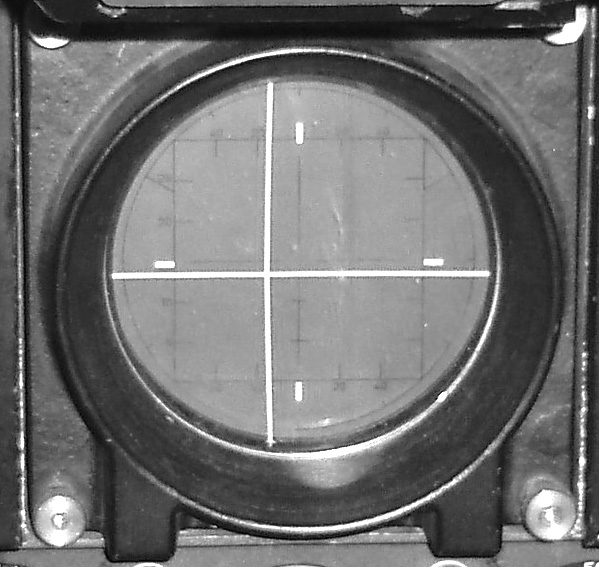
Radarindikatorn visade målets läge samt radarns antennriktning och
avståndssystemets position (kunde styras från STRIL) i målspaningsskedet (B-scop)
och den siktesberäknade taktiska anfallsprofilen i målföljningsskedet (F-scop).
Styrindikatorn framför radarindikatorn visade i STRIL-funktionen med Sidvisaren
avvikelsen mellan Beordrad kurs och flygplanets Egenkurs och med Höjdvisaren
avvikelsen från inställd höjd på FHIS samt i Navigeringsfunktionen riktningen
och glidbanan till navigeringsfyren samt inflygningskursen och glidbanan till
landningsbanans bantröskel.
Flyghöjdinställaren FHIS angav en inställd referenshöjd i vissa skeden samt gav
order om PLANE (glidbaneberäkning) i Navigeringsfunktionen.
|
 |
|
AHKI med sina indikatorer |
Kommandon
(20
st. i klartext i övre delen); FEL, HÖJDÄNDRING, FLERA MÅL, JAKT,
REMSOR, NYTT MÅL, OSÄKERT, VARNING, MÅLFART, MÅLKURS, 0 (nolla) FRAM, TVÄRS,
BAK, ÖKA, STIG, BRANT, BRYT, KVARLIGG och LANDA. Kommandotexten FEL informerade
piloten om fel i systemet eller att ingen signal fanns in till flygplanets
radiomottagare och 0 (noll) utgjorde ett parkeringsläge när RrJAL inte sände
något taktiskt kommando men att inget fel förelåg i systemet.
Målavstånd (AVST i vänstra spalten) i km x10 (Skede I) eller i km (Skede II)
Målhöjdindex (HÖJD i högra spalten) i km (liten pil)
Standardhöjd (HÖJD i högra spalten) i km och 0.1 km (runt index) samt refererat
till standardmarktryck 1013.2 mB.
OBS. På AHK-indikatorn på bilden ovan kan observeras det egna flygplanets
aktuella Höjd (2.45 km) till höger, att RrJAL informerat via styrdatameddelande
Avståndet till målet 350 km (d.v.s. Skede I) till vänster, Målets höjd (14.5 km)
på Målhöjdindex till höger samt att RrJAL beordrar stigning genom Kommando
(STIG) mot målet.
I pilotens hörlurar gavs via FR för uppmärksamhet en tonsignal (pling) vid
Skedes- och Kommando-växlingar
Kursindikatorn KI och dess Styrkursvisare under radarindikatorn visade
flygplanets Egenkurs och Beordrad kurs.
|
 |
|
KI med Styrkursvisaren |
Under detta skede använde RrJAL ett urval av Kommando såsom HÖJDÄNDRING, STIG,
REMSOR, OSÄKERT, NYTT MÅL, ÖKA, KVARLIGG, MÅLFART, MÅLKURS, FRAM, TVÄRS samt BAK
för information och/eller som order till piloten beroende på hur det taktiska
scenariot utvecklade sig.
Vid Kommando; MÅLFART från RrJAL angavs denne Målfarten i Mach (nedskalad 10
ggr) i stället för Målhöjden på Målhöjdindex och vid kommando MÅLKURS från RrJAL
angavs Målkursen i stället för Beordrad kurs på KI Styrkursvisare.
Under slutet av skedet förinställde piloten PS-funktioner på RP för spaning i
120-gr eller i en begränsad sektor c:a 70 gr till vänster, i mitten eller till
höger samt i 2- eller 4-linjers höjdprogram. Vidare ställer han in GYRO på
Radargreppet RG för att horisontreferera antennhöjdprogram samt utförde Vapenval på
VP. Vid val av JRAK, som här var förstahandsvapen, krävdes att inget annat vapen
var valt varför piloten med knappen AVBRYT ”rensade” systemet från eventuella
tidigare val av ROBOT eller KANON.
Skedets starttidpunkt meddelades via styrdatameddelandet från RrJAL vid c:a 40
km till målet. I förarkabinen indikerades skedesväxlingen med ljudton i pilotens
hörtelefon för att uppmärksamma honom på detta samt i datameddelandet med att
Målavståndet på AHK-indikatorn skalades om 10 ggr till att visa max 40 km.
|
 |
|
Radargreppet RG för PS och S |
Piloten startade radarsändaren Rr-sänd och ställer mottagarens Manuella
Känslighetsreglering MKR i optimalt läge på RG.
PS spanade i valt sidprogram och i ett av FLI horisontrefererat och från RG
styrbart höjdprogram. Antennhöjdvinkeln presenterades på Styrindikatorns
Höjdvisare. På PS indikator presenterade antennens sidläge och avståndet ut
till 30 km på ett avståndssvep nedifrån och uppåt med logisk sidläges- och
avståndpresentation av målekot. En från RP i avstånd reglerbar mållåsningsfålla
(kunde även styras från STRIL), LÅNG (ca 3,5 km) eller KORT (ca 300 m)
indikerades med en avståndslåsmarkör, s.k. strob vilken var centrerad i fållan.
Beroende på flyghöjd och/eller väder valdes Linjär LIN eller Logaritmisk LOG
mottagarförstärkning. LOG valdes alltid på lägre höjder för att bättre kunna
urskilja målekon från mark- eller vattenreflektioner, s k klotter.
Under skedet använde RrJAL i viss mån samma urval av Kommando som under
Anflygningsskedet. Tillkommande Kommandon kunde vara FLERA MÅL, JAKT, BRANT,
BRYT eller VARNING.
|
 |
|
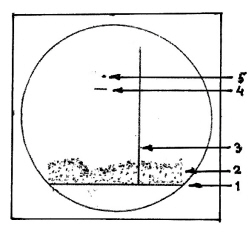
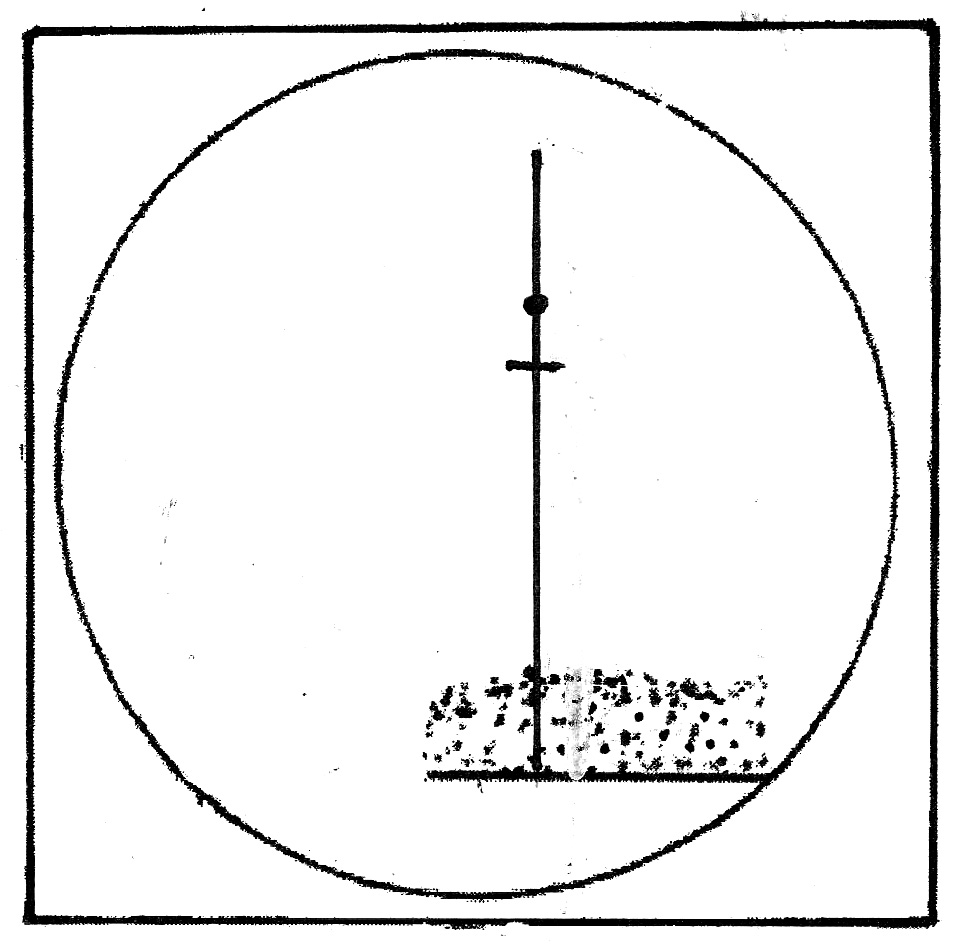
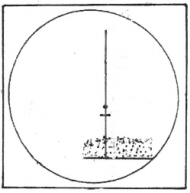
-
Nolleko vid avståndssvepets
start. Antennsvep 120 gr i sida
-
Ekon från underliggande
terräng / vatten.
-
Avståndssvepet från 0 – 30
km.
-
Måleko i bäring och avstånd.
-
PS avståndslåsmarkör, strob
kunde utläggas av STRIL.
|
|
|
PS indikator i spaning 120 gr i B-scop |
|
 |
|
|
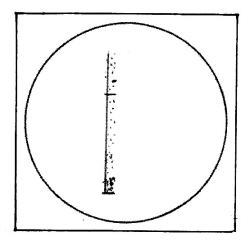
PS indikator vid positionsstyrning i B-scop
Antennsvep 10 gr |
|
Piloten kopplar sedan in funktion Markinformation TILL MIT på RG för att från
STRIL erhålla målutpekning på PS indikator. Där visade PS avståndsmarkör,
stroben, som styrdes av piloten om inte MIT valts, målutpekningen i form av en
punkt på indikatorn på grundval av Målavståndet samt skillnaden mellan
flygplanets Egen kurs och Målbäring från STRIL. När målekot, en 10 gr bred linje
på indikatorn dyker upp i anslutning till strobpunkten beordrar piloten
”Radarföljning” genom manöver FÖ T på RG. Härvid stannade spaningssvepet mitt
för måleko och strobpunkten och PS målfångning påbörjas. Eventuellt behövde
piloten justera antennens position och strobens läge (om KORT valts på VP) från
RG. När målekot fångats fullföljde PS inlåsningen på målekot och skedet var slut
efter 2 sek och PS lämnade stabila måldata till S i avstånd, sida och höjd.
På PS indikator ändrades presentationen till taktiskt F-scop varvid piloten
själv tog över ”ledningen” från RrJAL i LFC.
Detta skede inleddes när PS etablerat Rr-lås och piloten själv tog över
målföljningen på PS indikatorn. Tekniskt inkopplades skedet automatiskt från PS
till DC men kunde även väljas manuellt på PN ML till läge STRID. I båda fallen
”parkerades” Styrindikatorns Sid- och Höjdvisare utom synhåll för att inte störa
presentationen på PS Indikator under anfallets slutskede.
Under detta skede sände STRIL fortlöpande mål- och styrinformation till
flygplanet i händelse av att PS skulle ”tappa” målekot eller utsättas för
elektronisk störning. RrJAL kunde även sända ett fåtal kommandon vilka enbart
hade varnande och/eller stöttande syfte.
|
 |
|
Hela
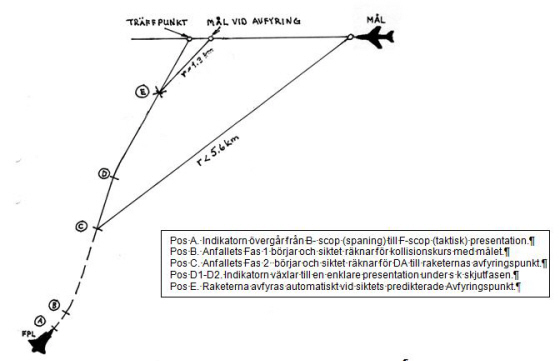
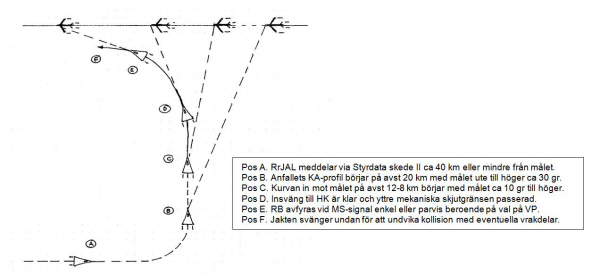
Jaktprofilen för System J35BD under samtliga Skeden för DL och DA |
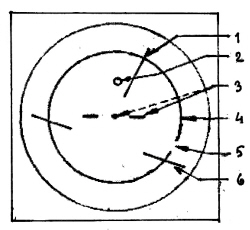
När radarföljningen etablerats och PS gav reella och noggranna målrörelsedata
till S, övergick PS indikatorpresentation till F-scop vid position A, se
profilbild nedan.
Vid position B startade sedan anfallets Fas 1. Med ledning av vapenval JRAK
arbetade S i Normalkoppling, varvid sikteskalkylatorn inledningsvis beräknade
styrvillkoren för DA mot kollision med målet. Vid DA med JRAK valdes alltid
skjutavstånd ”700m” med knappen STORT SKJUTAVST på VP för att minska risken för
kollision med målet (eller delar därav) vid undanmanövern efter avfyringen.
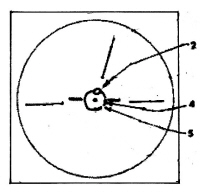
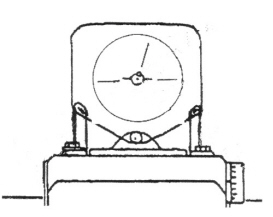
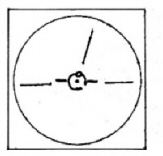
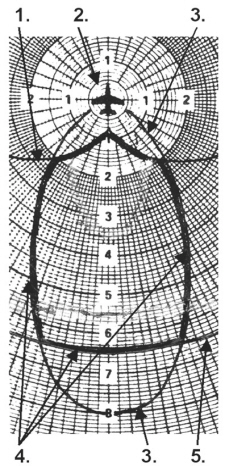
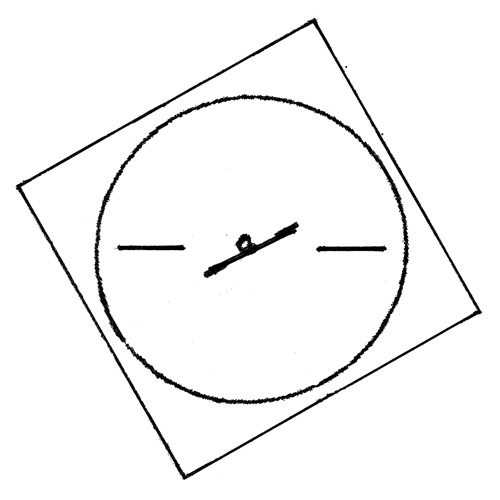
På PS indikator presenterades vid F-scop de nödvändiga styrmedlen för anfallet.
Styrsymbolernas huvudaktörer bestod av en Styrcirkel, som visade inriktningsfelet i sida och höjd till kollisionspunkten med indikatorns mitt som
referens samt en Tidscirkel vars storlek angav tiden kvar till kollisionspunkten
och började minska vid 30 sek kvar till densamma.
Andra symboler, som Konsthorisont och Flygplanreferens samt Radarantennens sidvinkel och indikeringen av
Relativa hastigheten utgjorde stödinfomation till
piloten för den taktiska flygningen under anfallet.
|
 |
|
1. Radarantennens sidvinkel.
2. Styrcirkel.
3. Nollreferenser för
flygplanskrovet.
4. Tidscirkel, minskande
diameter mot pos C och D.
5. Lucka i tidscirkeln, relativ
hastighet till målet.
6. Konsthorisont, referens från FLI.
|
|
|
PS indikatorns F-scop under Fas 1 pos B-C |
|
 |
|
De olika sekvenserna vid positionerna A, B, C, D och E vid inflygningen och
avfyringen med JRAK. |
Vid position C övergick anfallet sedan i Fas 2 när mindre än 25 sek
och 5,6 km målavstånd återstod till Avfyringspunkten genom att beräkningar av styr- och
tidsvillkoren i S ändrades till DA för raketernas bana till målet.
I ett tidigare läge, dock senast vid denna tidpunkt hade piloten, med ST på SS
kopplat ned SA för fortsatt flygning med grundstyrsystemet.
Piloten osäkrade Osä vapensystemets avfyringskretsar på SS övre del.
|
 |
|
Styrspaken SS
med manöverorgan och de olika strömställarna |
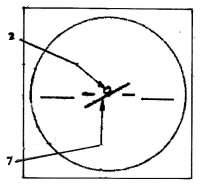
Stor precision krävdes i siktesberäkningarna och pilotens manövrerande i
slutfasen av anfallet. Raketerna måste också avfyras i rätt tidpunkt för säker
bekämpning av målet. Siktet kopplades därför om vid position D (D1 till D2) vid
5,6 – 4 sek kvar till avfyringen för förfinad beräkning av skjutvillkoren varvid
den s.k. skjutfasen inleddes. PS indikator växlade också taktisk bild så att
antennens sidvinkelmarkör uteblev och dess rollvinkel presenterades som markör
åt vilket håll flygplanet skulle rollas vid undanmanövern omedelbart efter
avfyringen.
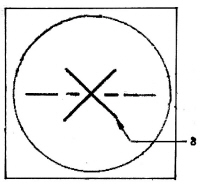
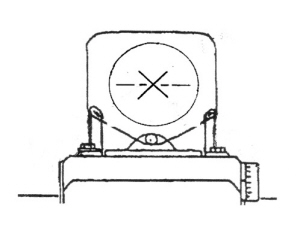
Avfyring av JRAK-kapslarna gjordes automatiskt av S utan att piloten behövde
göra avfyringsmanöver på SS vid position E när raketernas och målets kvarvarande
gångtid till kollision var lika stora. Tidscirkeln intog då minimal storlek och
avfyringen indikerades med att Styrcirkeln och Tidscirkeln på PS indikator
ersattes av ett Kryss vilket kvarlåg i 5 sek. Därefter kopplas PS målekoföljning
bort, och gick över i spaning med presentation av B-scop.
PS kunde i vissa fall tappa avståndsföljningen på målekot , t.ex. om målets
aspektvinkel ger ett svagt eko eller att målet sänder störning, s.k.
”egenstöning” ES antingen i brus- eller bärvågsform. Båda fallen indikerades av
att Styrcirkeln blinkade.
I det första fallet fortsätter PS att avståndsfölja med styrning från STRIL
eller på död räkning om STRIL-data saknas i alla koordinater viss tid och
avfyring kan ske med sannolik träffmöjlighet om jakten och målets flygbanor inte
ändras och det skedde i ett sent läge av anfallet. Återkom målekot i PS
avståndsföljeport ”låser” PS igen på målekot och S fortsätter sin noggranna
beräkningen.
I det senare fallet vid konstaterad ES kopplade piloten in s k ”Automatisk
Störpejl” med en knapp AS1 på RG. Härvid kopplar PS till antennföljning i sida
och höjd på störkällan, medan avståndsföljningen arbetade som vid målekobortfall.
Detta gav S beräkningar en ökad noggrannhet än vid enbart målekobortfall, även om
detta varade under en längre tid fram till avfyring, förutsatt att jakten och
målets flygbanor inte ändras.
 |
 |
 |
|
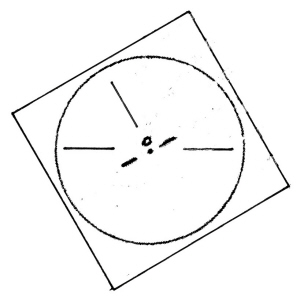
Pos D 1 |
Pos D 2 |
Pos E |
|
2. Styrcirkel.
4. Tidscirkel, minskande
diameter mot pos C och D.
5. Lucka i tidscirkeln,
relativ hastighet till målet.
7. Antennens rollvinkel.
8. Kryss som avfyringssymbol
|
|
|
PS indikatorns F-scop
under slutet av Fas 2 (D1) och s k skjutfasen (D2-E) |
För beräkning av skjutpunkten fanns i S för optimal träffsannolikhet en konstant
så att avfyringssignal sändes till raketkapslarnas tidverk när den 10:de raketen
i svärmarna tidsmässigt skulle kollidera med målet. Beräkningen av
styrinformationen, där även raketernas bansänkning ingick beroende bl.a. på
flygplanets höjd och fart, var också viktig och krävde en noggrannhet på mindre
än en grads avvikelse. Stor precision i flygningen krävdes därför vid målvinklar
upp mot 90 gr tvärs målbanan där sannolikheten för optimal bekämpning med JRAK
var som bäst.
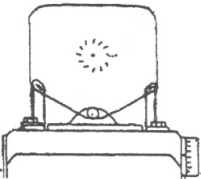
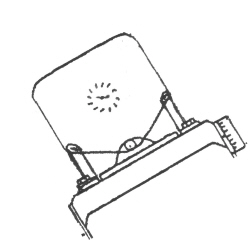
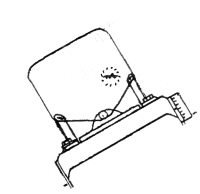
För att ge piloten en mer samlad inriktningsbild under dageranfall kunde han med
ett reglage och speciell optik välja att spegla upp radarbilden i reflexsiktet.
Denna funktion var dock i första hand till för att med sikteskameran RKA-14, som
var monterad ovanför reflexglaset, kunna fotografera radarbilden under anfallet
för efterutvärdering och i utbildningssyfte.
|
 |
 |
|
Pos D1 |
Pos E |
|
PS indikatorns F-scop
i reflexsiktet under Fas 2 |
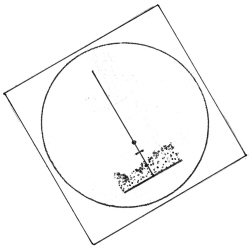
De 2x19 raketerna lämnade respektive kapsel samtidigt, under en tidsrymd av 0,33
sek med en topphastighet av 750 m/sek utöver flygplanets hastighet som var ca
300 m/sek vid M 0,9 på över 10 km höjd, i två c:a 300 m långa svärmar. Dessa
vidgades symmetriskt till en diameter på 6 m (ca 0,33 grader) efter 1 km
gångsträcka och 1 sek gångtid. I detta flygfall är raketsvärmarnas vidgning c:a 8
m. Raketernas sprängladdningar detonerade vid anslag i målet eller om de missade
genom autodestruktion, vilket skedde efter c:a 2,5 sek och c:a 2,5 km gångsträcka.
Eftersom avståndet vid avfyring skedde ganska nära målet och med hög
närmandehastighet räknade siktet även fram en Kollisionsvarning. Den
presenterades på de högt placerade röda lamporna på var sin sida om reflexsiktet
samt kraftigt ljud i pilotens hörlurar. Logiken och avståndet för initieringen
av varningen styrdes dels av att piloten tidigare valt optimalt
”frigångsavstånd” på VP (STORT SKJUTAVST) samt vilken av lamporna som skulle
tändas. När antennen pekade åt vänster tändes vänster och åt höger höger lampa.
Tillsammans med rollvinkelpresentationen i PS indikator vägledde detta pilotens
undanmanöver.
Ett JK-anfall med detta vapen kunde bli aktuellt om ett inledande DA
misslyckades och JRAK ej avfyrats samt att visuell inriktning kunde genomföras.
Det utfördes då med S i Gyrosikteskoppling på samma sätt som i JK med AKAN utan
radardata, se anfall i JK med AKAN nedan.
Härvid valde piloten först skjutavstånd ”400 m” med hjälp av knappen AVBRYT
(knappen STORT SKJUTAVST gick till frånläge) samt valdes GYROSIKTE för
Gyrosikteskoppling i S och JAKT för siktesberäkning JK , allt på VP. Gyrosiktets
riktmärkes ljusstyrka justerades med LJUSSTYRKA på VP.
Ett efterföljande anfall med RB24B (RB24J från 1977) kunde beordras av RrJAL om
lämpliga mål fanns tillgängliga. Anfallstypen var KA med efterföljande HK.
Upptakten för detta skedde via styrdatameddelande från RrJAL med Kommando; NYTT
MÅL och ljudton i pilotens hörlurar.
Ledningsinformationen i RrJAL-s styrdatameddelanden beordrade sedan på nytt
skede ANFLYGNING (Skede I) under vilket piloten gjorde Vapenval genom
intryckning av ROBOT på VP. Detta efterföljdes av skede ”Målspaning” (Skede II)
till utgångsläge för KA, 90 grader tvärs målbanan varefter skede ”Målföljning”
(”STRID”) inleddes.
Skede MÅLSPANING (STRIL) starttidpunkten meddelades från STRIL vid c:a 40 km
eller närmare till målet vid pos A, se profil för KA och piloten startade på RG
radarsändaren Rr-sänd. Målspaning utfördes med hjälp av presentationen på PS
indikator. Radarn spanade i hela eller sektoriserat program beroende på val.
Under skedet stöttades piloten fortlöpande med mål- och styrdata via
styrdatameddelande från RrJAL på berörda indikatorer.
|
 |
|
KA-profilens uppifrån i olika pos
A, B, C, D, E och F vid inflygning och avfyring med RB24B |
Skede MÅLFÖLJNING (STRID) inleddes när piloten påbörjar KA via PS indikator och
valdes med läge STRID på PN ML eller automatiskt när PS hade etablera följning
på målet. KA-profilen inleddes vid pos B med målet på c:a 20 km avstånd och c:a
20-30 grader ut till vänster eller höger beroende på anfallsriktning i sida. Fartförhållandet jakt/mål på 1/1,2 eftersträvades för att snabbare komma in mot
målet. Anfallet fortlöpte med målföljning via PS indikator i spaningsprogrammet,
nu sektoriserat 70 grader, i detta fall till höger så länge som möjligt för att
vilseleda följningsregistrering av jaktens PS i målets radarvarnare.
|
 |
|
PS indikatorns B-scop i pos
B. Målet 20-30 gr höger, avstånd 20 km |
Vid målavstånd 12-8 km vid pos C, beroende på bl. a. fartförhållandet började
insvängen (kurvan) mot målbanan med c:a 10 gr förhållning mot ett läge 2-3 km
bakom målet.
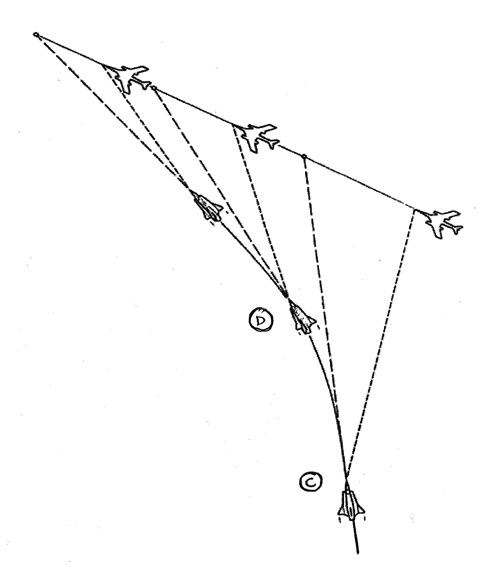
Vid anfall med RB24B krävdes att dess ”rakt fram”- fixerade (arreterade)
Målsökare MS pekade inom 4 gr mot målets varma delar (motorer) för att få
MS-signal från IR-strålningen. Detta var en förutsättning för att RB skulle
kunna styra till målet efter avfyring. Denna flygbana, som liknade en hunds
förföljande av ett byte kallades för Hundkurva HK. HK-anfallet måste även ske
inom ca 30 grader i målets baksektor från målets flygriktning på grund av att RB24B MS
IR-detektors våglängdsfrekvens (fönster) var anpassat för relativt höga
temperaturer som bara uppenbarade sig där.
|
 |
|
Bilden visar
ett typiskt HK-anfall |
För att erhålla skjutgränsberäkning och presentation för en noggrannare
inflygning i HK via information från PS indikator i F-scop valde piloten
Normalkoppling i S genom val RB på VP. Härefter etablerades radarföljning på målekot, i detta fall på c:a 10 km avstånd. Detta genomfördes på samma sätt som
vid uppkoppling till radarföljning vid anfall med JRAK. Den taktiska
presentationen på PS indikatorn visade nu styrinformation för anfall i HK med i
princip samma symboler som vid JRAK-anfallet samt beräknade RB24B skjutgränser
för det aktuella flygfallet.
Skjutgränserna beräknades i en speciell enhet i S och utgjordes av tre olika
gränser; maximalt skjutavstånd - R-max, maximal lastfaktor (i sväng) - N-max
samt minsta skjutavstånd - R-min. De beräknades och presenterades enligt följande:
R-max: När inmätt målavstånd R var större än beräknat R-max visades en
avståndscirkel (samma som tidscirkeln vid DA) med lucka för relativa hastighet
till målet, vars största storlek motsvara en skillnad av 6 km mellan R och
R-max. Med i detta fall jaktflygplanet i pos C visar cirkeln c:a 4 km kvar till R-max och relativa hastigheten c:a 300 m/s.
N-max: När uppmätt lastfaktor N var större än beräknat N-max och R är > R-max
visades en fast cirkel med lucka för relativa hastigheten till målet och vars
storlek är hälften av avståndscirkelns maximala storlek.
R-min: När inmätt målavstånd var mindre än R-min kopplades sidvinkelmarkören
bort och visades ett kryss (samma kryss som vid avfyring av vapen i S
Normalkoppling).
|
 |
 |
|
PS indikator F-scop i KA i pos C i KA-profilen.
R-max ännu ej passerats, ca 4 km kvar.
Närmandehastighet ca 300 m/sek |
PS indikatorns F-scop i HK i pos D i KF-profilen. Endast litet styrfel och alla mekaniska
skjutvillkor uppfyllda. |
När siktets skjutgränsberäkning vid radaravståndsföljning passerade yttre
skjutgränsen för RB24B flygegenskaper, vilket indikerades av att avståndscirkeln
minskat till noll, osäkrade Osäk piloten avfyringskretsarna på SS. Detta
inträffade vid ca 6,5 km mot mål över 10 km höjd med målfart M 0,85 och jaktfart
M 1,1. Piloten avvaktade sedan signal från RB24B MS vilket i skedde på ca 5 km
avstånd för sovjetisk bombmåltyp Tu-16 BADGER eller M-4 BISON.
För att ge piloten en mer samlad inriktningsbild under dageranfall kunde han
analogt med vid JRAK-anfall ovan, välja att spegla upp radarbilden i
reflexsiktet.
Alternativ metod vid KA- anfall med efterföljande HK-anfall kunde även ske via
PS indikator med spanande radarantenn, s.k. B-scops-inflygning i 120 gr eller
sektoriserat 70 gr spaningsprogram. Eller så kunde visuell inriktning med hjälp
av fast optiskt riktmärke utföras, fixerat i robotbalkarnas och RB MS
längdriktning i gyrosiktets dagdel.
|
 |
 |
|
PS indikator B-scop i pos C.
Målet 10 gr höger, avst
10 km
|
PS indikator rollad i pos D.
Målet rakt fram
|
|
 |
 |
|
Gyrosiktet horisontellt pos
C.
Målet ca 10 gr höger |
Gyrosiktet rollat pos D.
Målet
rakt fram, avstånd 6.5 km |
Med någon av dessa senare presenterade anfallsmetoder gick dock piloten miste om
värdefull skjutgränsinformation från S skjutgränsberäkning och fick själv avgöra
med tumregler när optimala skjutvillkor (flygmekaniska skjutgränser) var
uppfyllda. I båda fallen valdes ROBOT på VP. B-scops-inflygning genomfördes med
S i Normalkoppling via radarinformation på PS indikator och vid visuell
inflygning i Gyrosikteskoppling med inriktning via optiska siktets riktmärke.
RB Avfyrades med avtryckaren på SS och lämnade flygplanet en och en eller parvis
beroende på pilotens val på Robotväljaren på VP.
 |
|
1. Inre mekanisk
skjutgräns.
2.
Mål.
3.
Gräns för MS Tu 16.
4.
Totalt skjutområde (innanför).
5.
Yttre mekanisk skjutgräns
|
|
|
RB24B aktuella skjutgränserna vid det aktuella flygfall. |
|
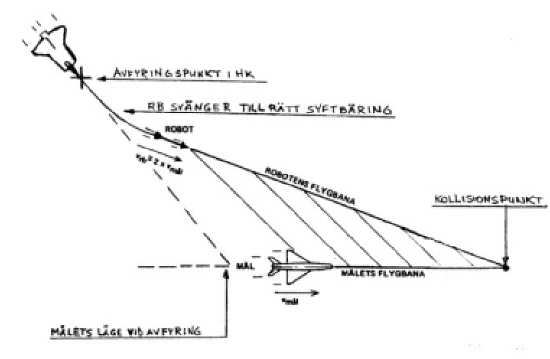 |
|
RB24 flygbana enligt syftbäringsprincipen
|
RB24B accelererade när den lämnade flygplanet till M 3.0 (inkl flygplanets fart)
och styr snabbt in till s k ”syftbäringskurs” mot en kollisionspunkt med målet.
Efter i detta flygfall 14-16 sek gångtid och c:a 9 km robotgångsträcka nådde
roboten målet och vid anslag i målet eller från signal från dess IR-känsliga ZON-rörsutlösning vid nära målpassage detonerade RB sprängladdning.
|
 |
|
Jaktrobot Sidewinder RB24J från 1977 |
Från 1977 ersattes RB24B med RB24J som var en modifierad och uppdaterad variant
av Sidewinder-robotfamiljen. Därmed förbättrades möjligheten till bekämpning
genom att RB24J MS var känsligare på grund av viss nedkylning av MS detektor och
minskad öppningsvinkel (för RB24B = 4 grader till c:a 1 grad för RB24J) vilket
ökade räckvidden med 25 %. Även robotens yttre flygmekaniska skjutgräns ökade på
grund av en kraftigare motor med längre brinntid samt avkortades den inre
flygmekaniska skjutgränsen genom att den fick bättre svängförmåga på grund av
styrfenornas nya utformning (dubbeldelta). På grund av MS snävare öppningsvinkel
uppstod dock vid inriktningen mot målets IR-strålning eftersom gyrosiktets
riktmärke ej kunde hålla fixeringen i kurvan (svängen in mot målet) och avvek
från centrum varvid piloten fick syfta in målet. Detta avhjälptes med att ett
fast optiskt riktmärke, s k aim point monterades på sikteshuvudets övre del.
Efterföljande anfall med AKAN kunde också beordras av RrJAL om lämpliga mål
fanns tillgängliga. Anfallet mot det nya målet föregicks av samma procedur som
med RB24B/J, d.v.s. KL följt av ett KA som leddes av RrJAL med
styrdatameddelanden genom MÅLSPANINGS- och MÅLFÖLJNINGS- skedena fram till att
piloten fick radarkontakt eller visuell kontakt med målet för genomförande av
JK.
För beräkning av anfallstypen JK med S i Normalkoppling och med stöd av
radardata gjorde piloten vapenval KANON på VP. Vid radarföljning matades alla
måldata från PS till S vilket beräknade och presenterade anfallet på F-scop i PS
indikator. JK-anfallet beräknades först som ett DA. När DA-anfallets
avfyringstidpunkt uppnåddes kopplades S om så att träffvillkoret kontinuerligt
uppfylldes. I det läget startade inflygning Fas I och vapnen osäkrades Osäk av
piloten på SS. När Fas II sedan inträdde gav S styrning för direktkurs så att
lämpligt utgångsläge uppnåddes för JK-anfall. Skjutfasen slutligen började med
omkoppling till JK och piloten började svänga för att minimera styrfelet.
Optimal avfyringstidpunkt inträffade när träffvillkoret i avståndsled, d.v.s. när
tidpunkten för AKAN- projektilernas och målets kvarvarande gångtid till
kollision var lika stora och Tidscirkeln intog minimal storlek. Vapnen Avfyrades
manuellt av piloten på SS vilket indikerades av ett kryss på PS indikator..
Kollisionsvarning med ljud och indikeringar efterföljde anfallet på samma sätt
som vid DA med JRAK.
|
 |
|
Anfallsprofil vid JK-anfall
|
|
|
 |
 |
|
PS indikator i DA i pos C |
PS indikator i JK i pos D |
Gyrosiktet i JK. med
visuellt mål. |
Beräkning vid JK utan radardata utfördes genom visuelle kontakt med målet med S
i Gyrosikteskoppling. Funktionen valdes med KANON eller JRAK samt GYROSIKTE JAKT
på VP. JK som anfallstyp karaktäriseras av att jaktflygplanet under sväng
riktades mot en beräknad träffpunkt framför målet som vid DA. Härvid kom
jaktflygplanet att beskriva en krökt bana. Träffpunktens läge relativt målet var
beroende av målavståndet och syftlinjens vinkelhastighet, d.v.s. flygplanets
sväng rörelse. Som grundinställnig för beräkningen av förhållningen till målet
förinställdes målets uppskattade spännvidd på ett graderat vred på sikteshuvudet.
Piloten styrde sedan flygplanet så att riktmärkets mittpunkt låg på målets och
reglerade kontinuerligt en ”ruteresscirkel”-s diameter runt målets yttersta
delar under anfallet med ett vridreglage på RK.
Efter att piloten osäkrat systemet Osäk gjordes Avfyring manuellt på SS varvid AKAN- projektilerna (20 st/sek) eller samtliga JRAK (48 st på 0.33sek) lämnade
flygplanet. Dess sprängladdningar detonerade sedan vid anslag i målet. 120
AKAN-skott fanns i magasinen och var förbrukade efter totalt 6 sek avfyringstid.
Skede MÅLFÖLJNING avslutades efter Säkring av vapensystemet och jakten svängt
undan från det sist bekämpade målet.
Detta skede bestod av 3 faser.
Fas 1 började med Kommando; LANDA från RrJAL och sände samtidigt
styrdatainformation om avståndet till startbasen i stället för Målavstånd och
återflygningskurs som Beordrad kurs samt anvisning om återflygningshöjd i
stället för Målhöjd. Piloten ställer in återflygningshöjden på FHIS och styrde
sedan flygplanet med de data om avstånd och kurs som visades på AHKI och KI och
informationen på Styrindikatorns Sidvisare avseende skillnaden mellan
återflygningskurs och egen kurs samt dess Höjdvisare till rätt
återflygningshöjd.
Om alternativ landningsbas rekommenderades från RrJAL angav denne Kommando LANDA
/ NYTT MÅL. Vilken bas som skulle väljas hade piloten själv klart sedan starten.
|
 |
 |
|
Styrindikatorn med Sid- och
Höjdvisarna |
Flyghöjdinställaren i läge NAV-plané
|
Fas 2 började när piloten väljer läge NAVRIKT på PN ML samt koden för lämplig
navigeringsfyr på kodväljare NAV. Avståndsangivelsen på AHKI parkerar då på 0 km
och piloten följer Styrindikatorns Sidvisare där riktningsangivelsen, utvärderad
av fältstyrkan i PN riktantenner i flygplanets luftintag och utan frågesändning
från flygplanet angav riktningen till den valda markfyren. Härvid flög
flygplanet radartyst och röjde sig inte.
När piloten valde NAV 400 på PN ML startade frågesändning och avstånd till vald navigeringsfyr erhölls på AHKI när navigeringsutrustningen ”låste” på markfyren.
Rikningsavvikelsen visades om tidigare men med knappen Plané utdragen på FHIS
visade Styrindikatorns Höjdvisare en 8 graders planébana (glidbana) mot
navigeringsfyren med en höjdangivelse med standardmarktryck (1013.2 mB) som
referens i beräkningen när flygplanet flögs med visaren i mitten. Vid avstånd 19
km omkopplades planébanan till 3 grader. Pilotens val av NAV40 på PN ML gav
sedan 10 ggr noggrannare avståndsangivelse och med fortsatt planépresentation på
Styrindikatorn samt en överensstämmelse med AHKI standardhöjdmätare för
3-graders planévinkel, d. v. s. förhållandet mellan höjd / avstånd = 1 / 20.
|
 |
|
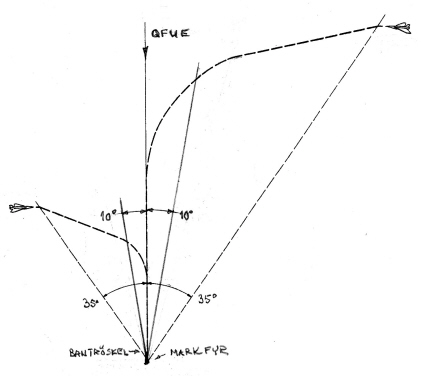
Inflygningskurvor uträknade av flygplanets analoga dator i läge LANDNING. |
Fas 3 utgjordes av Skede LANDNING
Skedet börjar när piloten valde läge LANDN med PN ML samt valde lämplig LAND-kod
för aktuell bas. Inflygningskursen till landningsbanan, benämnd QFUE (E =
elektrisk), vilken avvek 4 gr från den geografiska QFUG och korsade denne ca 2
km före bantröskeln ställdes in på Kursinställaren. Genom en bräkning i
flygplanets analoga dator DC jämfördes från DS LD-enhet flygplanets aktuella
flyghöjd, som var marktryckskompenserad och angavs som QFE och begärdes av
piloten från marken, med PN inmätta avstånd till bantröskeln och skillnaden
mellan inställt QFUE och aktuell flygkurs från FLI och flygplanets sidläge i
förhållandet till QFUE inmätt av PN. Styrindikatorns Höjdvisare visar med den
första jämförelsen en planébana på 3 grader och i den senare jämförelsen på
Sidvisare en krökt inflygning till Bantröskeln på landningsbasens landningsbana
när flygplanet flögs med båda visarna i mitten. Inflygningen i sida hade tre
sekvenser som började med godtycklig kurs mot QFUE. När sidläge mindre än 35 gr
passerades låste PN på landningssystemets Markfyr i avståndskanalen och en
konstant inkurs på 75 gr mot QFUE beräknades. När flygplanet passerade mindre än
15 gr sidläge från QFUE minskade vinkelvärdet successivt från PN in till DC fram
till 10 gr sidläge, varefter förhållandet 1 / 6 mellan sidlägesangivelsen från
PN från QFUE och inställd QFUE i beräkningen gav en mjuk och bekväm
inflygningssväng till QFUE när Styrindikatorns Sidvisare med en behaglig
bankningsvinkel på flygplanet flögs till mittläge.
|
 |
|
J35B landar med Bromsskärm på vägbas i trakten av Heby.
|
Efter landning med Bromsskärm för kort stoppsträcka avslutades Skedet när
flygplant går in i värn för tankning och omladdning av vapen av markpersonalen.
Klargöring av J35BD för nytt jaktuppdrag var normalt avklarat på mindre
än 10
minuter ofta med piloten kvar i kabinen (om inget tekniskt fel behövde åtgärdas)
varvid Jaktcykeln var sluten när flygplanet anmäldes flygklart igen och en ny
cykel kunde börja.
Ett jaktuppdrag med J35BD kunde alltså, när alla skeden i Jaktprofilen fungerade
som de skulle genomföras utan att ett enda ord sändes mellan markorganisationen
och jaktflygplanet (möjligen en gång när piloten meddelade ”jag leder”) vilket
hade kunna avlyssnats men knappast röjt uppdraget. Och ändå fick piloten alla
nödvändiga data och direktiv i alla delar av uppdraget för att komma till ett
säkert utgångsläge för anfall mot och bekämpning av det utvalda målet samt att
återflyga och landa på en lämplig flygbas. Samtidigt bidrog de markbundna
Styrdatasändarnas höga uteffekt (endast en tiondel nyttjades under fredstid) och
den bakåtriktade antennen för datamottagning på flygplanet till att
styrdatasystemet var mycket svårt att avsiktligt störa ut.
Detta System J35B/D utvecklades ytterligare i
J35F när det, med sitt nya
robotsystem togs i bruk. under mitten av 1960-talet
Skribent
Göran Hawée
|