|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
FPL35 Draken, SAAB 35 - Det första svenska Systemflygplanet för jaktuppdrag i överljudsfart.System J35F
Skribent
Göran Hawée BakgrundUnder andra världskriget utvecklades jaktflyget för att bekämpa fientliga bombflygplan, som i huvudsak verkade med insatser mot mål med stor utbredning som industriområden men även bostadsområden i terroriserande syfte. Även eskorterande jaktflyg skulle i viss mån kunna bekämpas varför jaktflygplanen måste ha allsidiga prestanda. De utrustades även för attackuppdrag om vapen fanns tillgängliga och kunde anpassas till flygplanen. Jaktflygplanen var därför försedda med kanoner och raketer och senare även med målsökande robotbeväpning. Flygvapnets jaktförsvar utvecklades under 1940- och till mitten av 1950-talet med en flora av utifrån anskaffade jaktflygplan som J26, J28 och J33 samt de svensktillverkade J21, J22 och J29. Även efterföljarna, den svenska J32B och engelska J34 bidrog till denna utveckling samt blev vägledande för att senare även J35 Draken konstruerades för samma ändamål. Hotbilden, d v s Sovjetisk invasion med bombflyg över Östersjön på hög höjd och med kärnvapen var högst påtaglig under det kalla krigets första hälft. Därför var det viktigt att jaktflyget hade prestanda och beväpning för att kunna nå och bekämpa detta hot.
Parallellt med utvecklingen av J35 Draken pågick vid Kungliga Flygförvaltningens KFF Robotbyrå ett intensivt utvecklingsarbete på en målsökande jaktrobot (RB321), som avsågs bli den första flygburna jaktroboten för direktanfall, d v s bekämpning av målet på mötande kurs. Utvecklingsarbetet avbröts dock och som ersättning anskaffades amerikanska IR- och radarmålsökande jaktrobotar till Drakenflygplanen vilka kunde börja användas från 1963 respektive 1965. Ersättaren till jaktflygplanet J29 Tunnan började planeras redan 1949. Flygvapnets mål var alltså ett överljudsflygplan som var prestanda- och elektronikmässigt optimerat som vapenplattform för direktinsats med robotvapen mot snabba, stora mål på hög höjd samt vara utrustat för flygning och bekämpning i alla väder och mörker av en besättningsman. Det skulle även vara anpassat till det unika svenska krigs- och vägbassystemet BAS 60samt till en markorganisation med ett utvecklat stridsledningssystem STRIL 60.
INNEHÅLL
Allmänt
Radarindikatorn med Styrindikator samt FHIS.
Flygplan 35 DrakenDen första prototypen av flygplan Draken, 35-1 - röd U flög den 25 oktober 1955. Totalt tillverkades 615 Saab 35 Draken i nio versioner. Av dessa utgjorde 19 st provflygplan och 63 st exporterades. Totalt beställde KFF 533 Saab 35, varav fem jaktversioner till Flygvapnet. Dessa jaktflygplan, J35A, B, D, F och J kom att nyttjas operativt vid 10 flygflottiljer och bestå av 24 divisioner Drakenflygplan. J35A avsågs att bli det första systemflygplanet i Draken-familjen. Så blev det dock inte p g a att flera svenska underleverantörer av delsystem inte fick fram utvecklade utrustningar i tid, se J35A Krigsfunktion. J35B och J35D beställdes som uppföljning till leveranserna av J35A, vilka blev utrustade med elektroniksystem som från början var planerad för Draken, d v s dels att kunna genomföra direktanfall mot mål i alla väder och mörker samt dels ledas mot målen med digital dataöverföring via radio utan tal, se J35BD Krigsfunktion.
J35F tillverkades i 230 exemplar och utgjorde den sista versionen av Draken som nytillverkades. Bakgrunden till flygplanets systemutformning var som för J35D, att söka bekämpa bombflygplan på hög höjd vars fartresurser, från mitten av 1970-talet hade ökat till M 2.0.
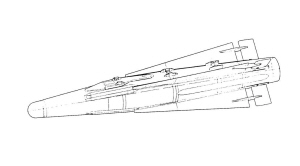
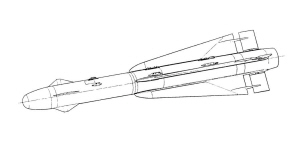
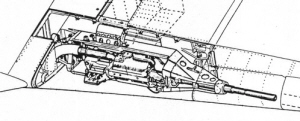
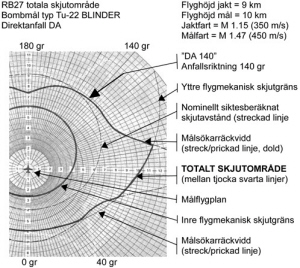
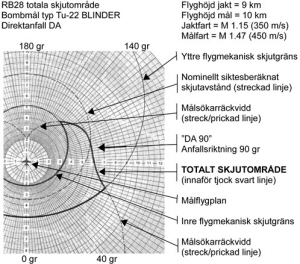
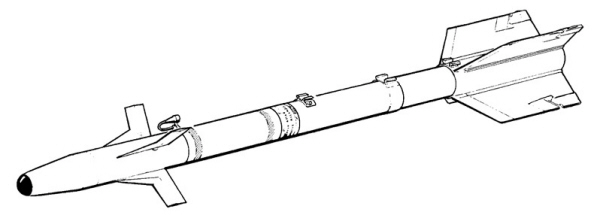
Sverige och KFF hade, med ett avtal från 1952 om teknologiskt utbyte mellan Sverige och USA som grund, under slutet av 1950-talet lyckats få köpa ett helt nytt flygburet robotsystem från USA i Sverige benämnda RB27 och RB28. De var av två versioner, en med radarmålsökare och en med IR-målsökare. Robotarnas målsökarkapacitet medgav anfall i alla riktningar mot målet. RB27 och RB28 ingick ursprungligen i en familj av jaktrobotar med namnet Falcon, som utvecklats av Hughes Aircraft Co HAC, USA. Den ursprungliga Falcon, AIM-4A, hade en passiv radarmålsökare, anpassad för X-bandet och började levereras i USA 1954 En version med infraröd målsökare togs där i tjänst 1956. Ett flertal andra versioner har senare utvecklats, däribland de svenska versionerna RB27 och RB28, som licenstillverkats av Bofors, Ericsson och Saab. Robotarna fanns i fem versioner och förutom de ovan nämnda också GAR-11 med semiaktiv radarmålsökare och kärnladdning, GAR-3 med semiaktiv radamålsökare (dyrare utförande) och GAR-4 med IR-målsökare arbetande på 3-4 my våglängd. För Sverige valde som radarrobot GAR-11 med konventionell verkansdel (stridsdel) och nytt ZON-rör. RB27 fick av HAC benämningen HM-55. Som IR-robot valdes GAR-2 med målsökaren från GAR-4. RB-28 fick av HAC benämningen HM-58. Dessa versioner köptes även av USAF under beteckningen AMI-26B (RB27) resp AMI-4C (RB28). J35F blev därmed utrustade som det från början var tänkt för Draken, med elektronik och vapen för anfall mot stora mål på mötande kurs i alla väder och i mörker. J35F var i stort lika i grundflygplanet som J35D men hade en mer omfattande elektronik för anpassning av robotsystemet varför utrymmet för en av automatkanonerna måste nyttjas för vissa delar av beväpningssystemets radarsikte där robotbeväpningens hjälpelektronik ingick.
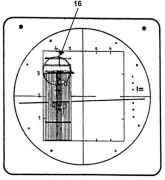
J35F flög i provserieutförande första gången redan 22 december 1961.Vid leveranserna från Saab hade alla flygplan den planerade utrustningen. Under tillverkningen av de första flygplanen anskaffades en IR-spanare, även den utvecklad av HAC, vilken medförde sådana taktiska skillnader att J35F utan IR-spanare benämndes J35F1 och flygplan med IR-spanare, benämndes J35F2. Även under flygning separerades de båda delversionerna så att J35F1 fick udda anropssignaler (nummer på fenan) och J35F2 fick jämna nummer. 100 J35F1 levererades i från maj 1965 till december 1967 och 130 J35F2 från oktober 1967 till juni 1972. Under början av 1980-talet förekom förhandlingar mellan Flygvapnet, Försvarets materielverk FMV och statsmakterna om jaktflygets utformning efter 35-systemet planerade avveckling 1983. Leveranserna av JA37, jaktversionen av Viggen blev fördröjda liksom beslut om anskaffning av JAS 39 Gripen. Under 1982 framkom att J35F beväpningssystem kunde avsevärt förbättras till en rimlig kostnad och anpassas till den förändrade hotbilden. FMV undersökte på uppdrag av Chefen för flygvapnet CFV, om förrådsställda J35F2 kunde moderniseras och igångsättas och vilka åtgärder som behövde göras för att kunna ingå i luftförsvaret ytterligare ett antal år framåt in på 1990-talet.
CFV-s prioritering av åtgärder var i första hand inom Beväpningssystemet med förbättrad Radar och Sikte och nya balklägen för RB24J, samt inom vissa flygsäkerhetssystemen. 1984 var utredningen klar och FMV, med stöd av ÖB hemställde hos Regeringen om medel för iordningsställande av 54 st J35F2 för flygning till 1997. Detta beviljades 1985. Omfattningen av ändringarna motiverade sedermera den nya versionsbeteckning J35J. 1986 ökades beställningen med 12 flygplan till totalt 66 J35J. En beskrivning av den nya versionen kan läsas om i en särskild artikel om J35J . Parallellt med dessa undersökningar gjordes även en utredning om anskaffning av ytterligare en division JA37 (16-20 flygplan) förutom de åtta divisioner som redan var beställda för att täcka det operativa jaktbehovet fram till det JAS39 kunde börja levereras. Denna utredning lades ned när beslutet om att J35F2 skulle modifieras och konverteras till J35J varvid mycket pengar sparades.
System J35F i symbios med Stridsledningssystemet STRIL 60.InledningJ35 Drakens olika versioner skapades, med hjälp av den begynnande moderna avioniken *) till ett integrerat System 35, (radio, olika radar och sikten samt flygdatasystem sammankopplade) som tillsammans med STRIL 60-systemet (via radarkontakt och radiosamband) skulle samarbetade för att optimalt nyttja jaktflygplanen i alla väder och mörker i hela dess taktiska register. Denna ”resa” som jaktflygplanet m h a STRIL 60 och en där ingående Radarjaktledare RrJAL skulle göra från i princip start till landning i ett jaktuppdrag, fick tidigt benämningen Jaktcykel . Mången personal av olika kategorier var involverade under denna ”cykel” för att jaktuppdraget skulle kunna genomföras på ett framgångsrikt sätt. Där ingick ledningspersonal i Luftförsvarscentralen Lfc, piloter i flygplanen samt flygplantekniker för service- och felavhjälpande underhåll på System J35. STRIL 60-system hade alltså en stor roll i jaktstrategin vid ledningen av jaktflygplanen fram till ett bra utgångsläge där jaktens egna målinmätningssystem MIS kunde ta över samt vid återflygningen till basen. *) Avionik är en försvenskning av det engelska uttrycket avionics, som bildats av de två orden aviation electronics, vilket motsvarar flygelektronik på svenska. En allmän redogörelse om FV-s stridsledningssystems uppbyggnad och funktion kan studeras i speciell artikel om STRIL 60.
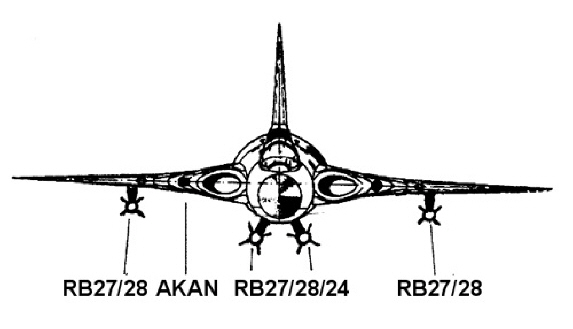
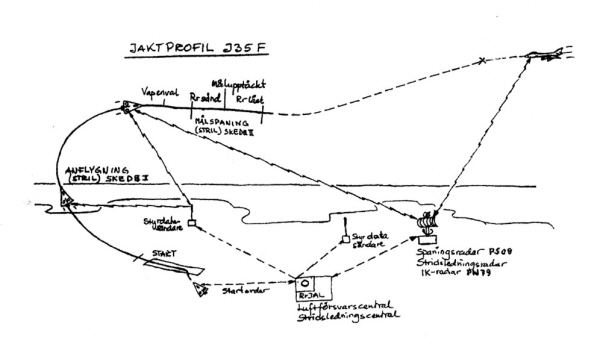
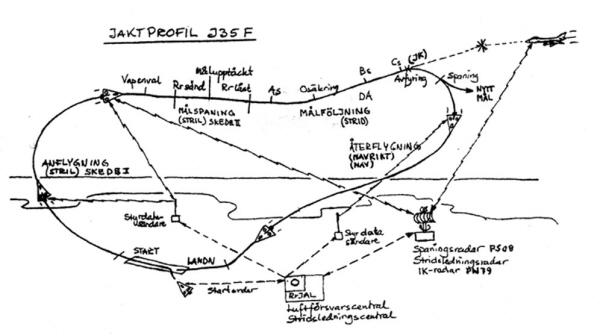
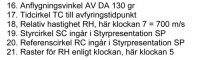
STRIL 60 i samarbete med System J35F/J.AllmäntFör att åskådliggöra jaktcykeln skapades en pedagogisk överblicksbild av ett stridsuppdrag från start till landning, en s k Jaktprofil för att alla inblandad personal skulle få en bra uppfattning om sin egen och andras roll(er) och funktion(er) i sammanhanget. Jaktprofilen för J35F präglas av att även denna version kunde uppträda offensivt i ett första Direktanfall DA på mötande kurs med målet. Detta utfördes dock med radar- och IR-sökande RB27 och RB28 som beväpning. Även med dessa vapen uppnåddes målet att Drakenflygplan kunde bekämpa mål på mötande kurs också med fördelen att de hade längre räckvidd än JRAK. Som alternativt robotvapen kunde jaktobotar RB24B Sidewinder användes och som andrahandsvapen 30 mm automatkanoner AKAN i målets baksektor för anfall i HK (RB24B) eller JK (AKAN). Jaktprofilen är i princip representativ för alla jaktversioner av flygplan 35 Draken från tiden 1961 (J35A), från 1964 J35B och J35D samt från 1966 (J35F) och framåt en bit in på 1970-talet.
JaktcykelnHela detta förlopp indelades liksom för J35BD i olika flygfaser, eller s k Skeden. Dessa fick speciella namn och användes av alla inblandade människor såsom STRIL-personal, piloter och flygplantekniker. De användes även som elektriska villkor i logiska kretsar i kalkylatorer och datamaskiner på marken och i flygplanen vilket var till stor hjälp för att åskådliggöra Jaktcykeln i dess alla delar under uppdragets genomförande.
I System J35F ingick också DS-2 – systemet med den analoga DC-2, identisk med den i J35B/D vilken utförde de logiska omkopplingar som var beroende av vilket Skede i System J35F som f n gällde. Styrningen av skedena gjordes även här i huvudsak från PN-594 Manöverlåda ML av piloten eller från STRIL 60 via digitala styrdatameddelanden från Rrjal när läget STRIL på PN-594 ML De diskreta styrdatameddelanden var i stort sett samma som till System J35B/D och presenterades på samma sätt och på samma indikatorer som i dessa versioner. Viss ytterligare information hade dock tillkommit.
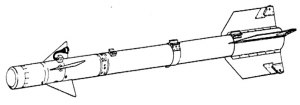
I System J35F bestod beväpningen av, för ett första anfall på mötande kurs med målet fyra Falcon-robotar vilka utgjordes av RB27 med radarmålsökare och RB28 med IR-målsökare. Robottyperna kunde monteras blandade eller enskilda beroende på måltyp och ev. störningshot. För optimal verkan mot störande mål valdes som huvudalternativ två av varje slag, sk ”blandad” last. Som komplement fanns en 30 mm Automatkanon AKAN m 55 av fabrikat med 90 skott i magasinet för JK-anfall. Alternativ vapenlast kunde vara en till två kroppsmonterade RB24B monterade på lavett på separata balkar under flygkroppen för ett uppföljande KA. När två FT medfördes hängdes två RB27 eller RB28 eller en av varje under vingarna.
Som riktmedel för beväpningen hade SAAB vidareutvecklat Sikte S från J35B/D för allvädersbruk vilket även nu byggde på målinformation från en av LME utvecklad en nosmonterad Pulssiktesradar PS, nu med 25% bättre räckvidds- och följeprestanda än radarn i J35BD. I J35F2-serien tillkom en i USA utvecklad IR-spanare monterad under flygplanets nos som var helt integrerad med PS i antennföljningen. Som komplement i S fanns också ett optisk Gyroreflexsikte grundat på visuell kontakt med målet. Tillsammans med PS kunde S användas i DA med RB27/28 samt i KA med RB24. Med Gyrosiktet kunde anfall i JK utföras med AKAN samt i HK med RB24. Radarsiktet utgjorde grundkoppling när inriktningen skedde med hjälp av målinformation från markledning STRIL och styrinformationer från S baserat på måldata från PS som presenterades på PS indikator. Gyrosiktet baserade sig på visuell målinriktning med hjälp av S optiska del. Nedan följer en beskrivning av händelserna i flygplanets operativa delar i avioniksystemen i de olika Skedena. Texten inom parentes är inställda läget på PN ML. Eftersom de olika 35-versionerna har något avvikande utseende så visas de på bilder var för sig och i den ordning de togs i bruk i Flygvapnet.
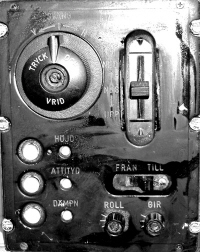
Skedet BEREDSKAP (FÖRVÄRMNING)Skedet började när piloten anmäler flygplanet klart i ”Högsta beredskap” till Luftförsvarscentralen Lfc och den egna basens Kommandocentral Kc. Piloten hade bl.a. för den skull direkt och radiotyst kommunikationsförbindelse med dessa via ”Markslingan”, ett system uppbyggt enbart med kabel vilket var bra ur sekretess- och störningssynpunkt. Piloten kunde även höra kommunikation med andra flygplan som var anslutna till slingan. till . Under detta skede var markström anslutet via flygplanets markanslutning från ett Beredskapsaggregat BRAGG. Flygplanets Huvudströmställaren var i läge TILL och Flygradio FR var igång för kontakt med markorganisationen men Flygmotorn var ej igång. Piloten satt i kabinen och hade vidtagit de nödvändiga åtgärderna för att snabbt kunna starta. Alla övriga avionikutrustningar som fordrade tid för uppvärmning var strömsatta i sina respektive uppvärmningslägen för att inom kort tid kunna tas i bruk vid startorder. Berörda system var Flyglägesinstrument FLI (TILL och snabbstbbilicerat), Styrautomat SA (TILL), Datasystem DS och Navigeringsradar PN (FÖRV/STRIL), samt Igenkänningsradar IK (BER/TILL). Aktuellt marktryck är inställt på Höjdmätaren. I beväpningssystemet berördes Siktesradar PS (RADAR i BER) och Siktet S (VAPENVÄLJARE i FÖLJN) samt förinställningar för PS. Dessa var Smalt (SMAL/BRED) sökprogram, (LIN/LOG) i linjär mottagarförstärkning, låsning (FRAM/BAK) på målekots framkant, ej jittrad (JITT TILL/FRÅN) pulsrepeterfrekvens PRF på RP, 2 linjers (2 LINJ/4 LINJ) sökprogram, gyrostabbiliserad antenn (FPLF TILL/FRÅN) på VP samt mätområde (40/16) 40 km och val radarföljning på måleko (RR-IR) och S1-S0) i läge RR respektive S0 på PS Handkontroll HK.
I ett tidigt skede av tillverkningen av J35F1 fanns ett Radargrepp RG, i likhet med det i J35B/D installerat i en första serie av flygplan. Detta fick sedermera utgå efter beslut till förmån för en HK som var mer lätthanterlig operativa lägen. I J35F2 med IR-spanare startade piloten IR-kylningen och inställde ljudtröskeln (LJUDTRÖSKEL IR) och 4 linjers (2 LINJ/4 LINJ) sökprogram på VP samt IR-känslighet (IR-KÄNSL) och ljudstyrka (LJUDSTYRKA IR) på RP resp på reglage invid RP. Dessa åtgärder gjordes alltid för att inledningsvis i spaningsläget få tidigare målupptäckt med IR-spanaren som hade större kännlighet än radarn och senare efter mållåsning kunna anfalla med s k blandad radar/IR-följning med IR-spanaren som antennföljare och radarn som avståndsföljare på målet. Detta gav fördelen att systemet ej påverkades av elektronisk antennföljningsstörning och fick bättre låghöjdsprestanda.
Ingen kylluft för avioniken behövde vara ansluten. Skedet valdes systemmässigt av piloten med PN ML i läge FÖRV/STRIL. Flygplanet var fulltankat, vid behov med Fälltankar FT samt med en beväpning enligt flygplanversionens huvudalternativ. Efter modifieringar i flygplanens luftsystemet kunde avioniken kylas och kabinutrymmet uppvärmas vintertid eller kylas vid varma sommardagar från BRAGG. Med BRAGG modell B tillfördes luften i ett kombinerat el- och kylluftsanslutningsdon GT-6 som var monterat på vänster landställsben för snabb separation. Vid läge ”5 min beredskap” (eller längre tid) var piloten placerad i värn. Flygplanet var ej strömsatt. För att förhindra fördröjning av starten när startorder kom startade Mekanikern avioniken och gjorde de förberedande åtgärderna samt övervakade kabinen till piloten äntrade kabinen.
Skedet START (STRIL)Skedet började när startorder gavs från Lfc av Tråjal till jaktflygplanen i Beredskap. Beslutet hade tagits av Jaktledaren JAL på grundval av att fiendemålekon uppträtt på spaningsradarns PPI (Plan Position Indicator) -indikator. Piloten startar flygmotorn och när huvudgeneratorn kopplades in efter 10-15 sek bryts markströmmen och trådslingan bort av mekanikern. I senare modifiering separeras markströmsanslutningen och trådslingan från ett markströmsintag monterat på vänster landställsben (GT6) resp under vingen när flygplanet rullade iväg. Under utkörning till start vidtar piloten åtgärder i systemet för mottagande av styrdatameddelande från STRIL 60 genom att ställa PN594 ML i läge STRIL. Han valde även anbefalld STRIL-radiokanal på Sändtagare ST FR-16 (reservradio). Även för ordinarie kommunikationsradio ST FR-17 Manöverenhet ME hade piloten eller marpersonal vi behov skiftat Kanalförväljare (kallad ”spaden”) för talkommunikation med STRIL eller styrdatamottagning om han växlat station på en Omkopplingsenhet FR-17/16/23 (FR-23 ersatte senare FR-16 i SK60). På FR-17 ME valde piloten med knappsystem anbefalda och förvalda kommunikations- eller styrdatakanlfrekvenser vilka styrde inställningen av ST FR-17.
Från första leveransen 1965 och under de 15 följande åren moderniserades radiosystemen i omgångar. Från 1967 ersattes FR-17/16 av radiosystemet FR-21A /-21B med en gemensam ME1 med Kanalväljare KV för styrdatamottagning och kommunikation. STRIL-kanalerna betecknades med siffror för att särskilja från talkanalfrekvenser som betecknades med bokstäver. För FR-21/21 ME krävdes vid omprogrammering extra frekvensstavar vilka fanns klara för snabb ändring i flygplanet. Alternativt kunde Kommunikations- och STRIL-frekvenser väljas manuellt på resp ST FR-21 genom intryckning av ”minus”-knappen i samma rad. FR-21 /-21B Sändare/Mottagare, betecknad Sändtagare ST, samt en gemensam ME1 för FR21 /21B. Från 1974 började J35F tillsammans med införande av ST FR28 med FR-21 Manöverenhet ME2 som tillsammans med en Signalanalysator SA och en förprogrammerad Programpropp PP vid speciellt val, automatiskt sökte efter fullgod signal för dataöverföringen bland 16 olika förvalda styrdatasändarfrekvenser inom en av fyra STRIL-sektorer i Sverige. Sektorerna utgjordes av Sektor Syd SeS, Sektor Mitt SeM, Sektor Nedre Norrland SeNN och Sektor Övre Norrland SeÖN. För dessa fanns färdigt programmerade PP som medföljde flygplanen vid ombasering. Även manuell frekvensinställning kunde ske.
Från 1976 utbyttes radiosystemet i J35F ännu en gång till ett komplett FR-28/-21B-system med en ny ME1 för ST FR28 med Kanalväljare KV för styrdatamottagning och kommunikation. Knappsatserna för frekvensval hade nu kompletterats med vred och fönster för indikation av valda kanaler samt hålremsor som grund för programmering. STRIL-kanalerna betecknades med siffror för att särskilja från talkanalfrekvenser som betecknades med bokstäver. Med hålremssytemet fanns både freds- och krigsalternativet med i flygplanet och inga speciella åtgätder behövdes. Alternativt kunde frekvenserna väljas manuellt på ME1 genom intryckning av en ”minus”-knappen och manuell inställning i ett sifferfönster. För manövrering av ST FR-21B infördes en ME3 eftersom ST FR-21B flyttades ur kabinen. ME3 var byggd för ”fjärr”-styrning av FR-21B med alla faciliteter som behövdes.
IK Manöverlåda ML i läge TILL på Funktionsväljaren FV samt ställde dess Kodväljaren i anbefallt läge. Han gör en snabb test av IK-funktionen med hjälp av en två-läges Testströmställare ”KONTROLL” och en Indikeringslampa.
PS och S startar automatiskt 30 sek efter det flygplanets generatorn kopplats in och markströmskällan avlägsnats, förutsatt att 180 sek förflutit från det omkopplare RADAR i TYST (sändareffekten i konstlast) på VP. Antennen spanar i valt program och indikatorn visar B-scopspresentation. Vid behov ställer piloten även in PS indikatorns symboler och ljusstyrkan för S optiska siktesbild med hjälp av reglage på VP. I System J35F startade RB27 och RB28 momentgyron och målsökargyron med förhöjd spänning i 15 sek när flygplanet höjer nosen. I RB27 omkopplades även om för yttre avsånds- och frekvensslavning. Vid införande av ”enkelskott RB28” från 1970 inkopplades även låg glödspänningar fram till RB28.
Piloten drar på motorn och tänder EBK och lättar efter ca 20-30 sek och en knapp km på startbanan samt börjar svänga och stiga mot beordrad kurs och flyghöjd. Vid infällning av landställen kopplas markspärrarna för beväpningssystemens elkretsar bort.
Skedet ANFLYGNING (STRIL) Skede IDetta skede startar när piloten hade ställt PN594 ML i läge STRIL och jaktflygplanet lättat. När Rrjal, som nu övertagit ledningen av jaktflygplanet identifierade detta på sin radarindikator PPI och fått rätt IK-svar från flygplanet på fråga om dess identitet, d v s anropssignal beordrar han omgående mål- och jaktföljning med hjälp av följesymboler ”låsta” på jakteko och måleko. Till hjälp hade han en Målobservatör MÅLOBS. STRIL-s avancerade stridsledningsdator återmatade sedan till Rrjal-s PPI den beräknade optimala flygbanan till utgångsläge för anfall med Robot RB27/28 d v s DA företrädesvis i målets framsektor.
Rrjal överförde sedan styrdata till flygplanet, analogt som förJ35B/D genom val av olika styrvillkor, måldata och kommandon som skulle ingå i styrdatameddelandet och sedan via utsändning från valda styrdatasändare på de anbefallda STRIL- radiofrekvenser. I flygplanet togs styrmeddelandena emot, antingen via en Rundstrålande antenn eller vid behov och val av piloten, via en Bakåtriktad antenn som minimerade påverkan från fiendestörning mot FR datamottagare. I FR detekterades signalerna och i Flygdatautrustningen FD Programenhet omvandlades meddelandet till digitala ”1-or” och ”0-or” varefter dessa i FD Registerenhet omvandlades till analoga signalvärden. I DC omvandlades sedan signalvärdena från FD till representativa analoga elektriska spänningsvärden vilka styrde presentationer på olika instrument och indikatorer i flygplanets kabin. För att underlätta den fortsatta anflygningen kopplade piloten in Attityd (Autopilot) på SA-05 Manöverenhet ME varvid automatisk attityd- och kurshållning erhölls samt eventuell styrningen av flygplanet behändigt kunde ske med en Svängratt och en Upp/Nej-reglage på SA ME. En finess fanns i SA-05B var att kunna välja Mach-hållning vilket senare från 1974-talet utbytes mot HÖJD-hållning vid modifiering till SA-05C. Vid båda valen fanns ATTITYD-funktionen kvar. Vid snabba justeringar av flygläget kund piloten, med en Spaktangent ST på Styrspaken SS koppla ned SA (Autopilot) för direkt flygning med styrspaken via flygplanets grundstyrsystem. Flygplanet intog sedan den aktuella attityden när tangenten släpptes ut.
Informationen i Styrdatameddelandet skulle ledda jaktflygplanet till ett utgångsläge för DA med målsökande Robotar. Förfarandet kallades Direktledning DL. Vid eventuellt anfall med RB24B ledde informationen till utgångsläge för KA (kurvanfall) eller JK (jaktkurva) vid anfall med AKAN. Ledningsförfarandet i de sistnämnda fallen benämndes Kurvledning KL.
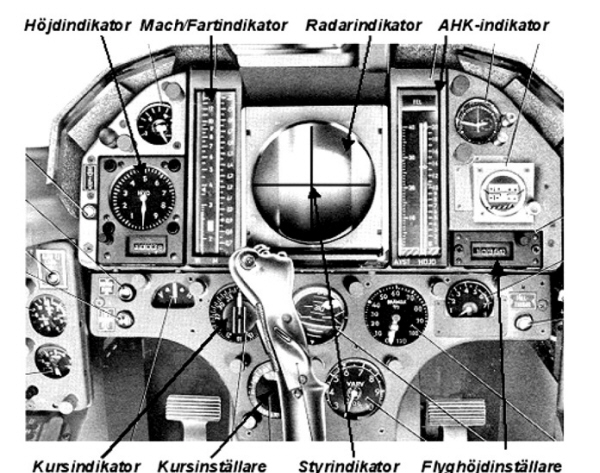
DL medförde att jaktflygplanet leddes i en bana direkt mot en punkt där piloten själv kunde, efter mållåsning med PS fortsätta, i ett siktesberäknat DA till avfyring av robotarna. Tiden fram till nästa skede varade tidsmässigt olika länge beroende på hur fort jaktflygplanet kunde stiga till lämplig höjd och avstånd för övergång till nästa skede i jaktcykeln. Vid höghöjdsmål skedde stigningen i etapper eller direkt till ca 10 km meters höjd där jaktflygplanet planade ut och där atmosfärstemperaturen var som lägst och dragkraftstillskottet var som störst. Piloten accelererade sedan flygplanet och öka farten samt steg mot högre målhöjder. All information till piloten från STRIL 60 var koncentrerad på indikatorer runt radarindikatorn på instrumentpanelen i kabinen för att piloten skulle få optimalt nyttjande av all väsentlig information under den taktiska flygningen.
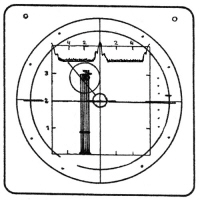
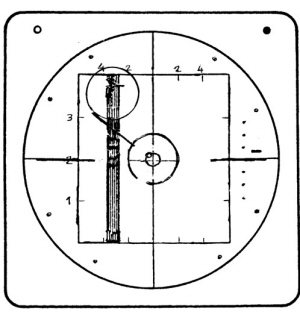
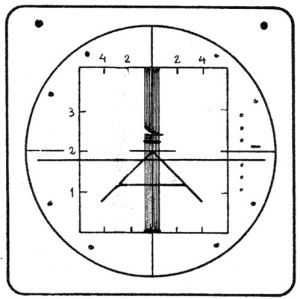
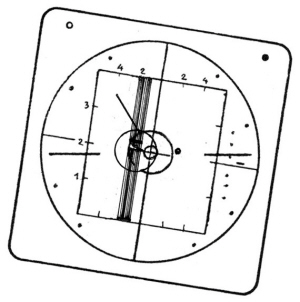
Radarindikatorn med Styrindikator samt FHIS. Radarindikatorn visade radarns antenn och IR-spanarens målsökar MS-riktning och radarns avståndssystemets position i målspaningsskedet (B-scop) samt senare den siktesberäknade taktiska anfallsprofilen i målföljningsskedet (F-scop). Styrindikatorns framför radarindikatorn visade i STRIL-funktionen med Sidvisaren avvikelsen mellan Beordrad kurs och flygplanets Egenkurs och med Höjdvisaren avvikelsen från inställd höjd på FHIS samt i Navigeringsfunktionen riktningen och glidbanan till navigeringsfyren samt inflygningskursen och glidbanan till landningsbanans bantröskel. Flyghöjdinställaren FHIS angav en inställd referenshöjd i vissa skeden samt gav order om PLANE (glidbaneberäkning) i Navigeringsfunktionen.
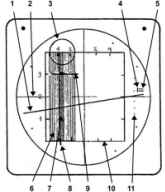
Avstånd-Höjd-Kommando AHK-indikatorn och FR hörtelefon. Kommandon (20 st i klartext i övre delen); FEL, HÖJDÄNDRING, FLERA MÅL, JAKT, REMSOR, NYTT MÅL, OSÄKERT, VARNING, MÅLFART, MÅLKURS, 0 (nolla) FRAM, TVÄRS, BAK, ÖKA, STIG, BRANT, BRYT, KVARLIGG och LANDA. Kommandotexten FEL informerade piloten om fel i systemet eller att ingen signal fanns in till flygplanets radiomottagare och 0 (noll) utgjorde ett parkeringsläge när Rrjal inte sände något taktiskt kommando men att inget fel förelåg i systemet. Målavstånd (AVST i vänstra spalten) i km x10 (Skede I) eller i km (Skede II) Målhöjdindex (HÖJD i högra spalten) i km (liten pil) Standardhöjd (HÖJD i höger spalten) i km och 0.1 km (runt index) samt refererat till standardmarktryck 1013.2 mB. OBS. På AHK-indikatorn på bilden ovan kan observeras det egna flygplanets aktuella Höjd (2.45 km) till höger, att RrJAL informerat via styrdatameddelande Avståndet till målet 350 km (d v s Skede I) till vänster, Målets höjd (14.5 km) på Målhöjdindex till höger samt att Rrjal beordrar stigning genom Kommando (STIG) mot målet. I pilotens hörlurar gavs via FR för uppmärksamhet en tonsignal (pling) vid Skedes- och Kommando-växlingar
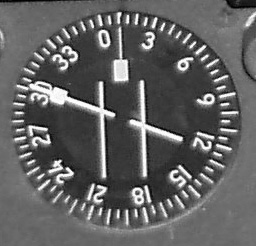
Kursindikatorn KI och dess Styrkursvisare under radarindikatorn visade flygplanets Egenkurs och Beordrad kurs eller inställd Landningskurs i Navigeringsfunktionen.
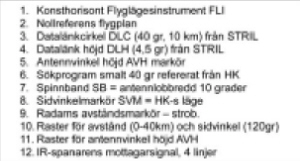
I System J35F kopplas automatiskt symboler för målutpekningen in från Rrjal till radarindikatorn med PN ML i läge STRIL. Där visade STRIL med en Datalänkcirkel DLC målets förväntade läge i sida och avstånd på radarindikatorn, t v parkerad på avstånd 40 km. Grundvärdena utgjordes av skillnaden mellan flygplanets Egen kurs och Målbäring. Med en symbol Datalänk Höjd DLH visade STRIL målhöjdvinkeln baserad på Målhöjden och Jakthöjden samt Målavståndet refererat till horisonten. Övrig presentation på PS indikator utgjordes av de nödvändiga hjälpmedel för piloten för att senare kunna manövrera radarn och IR-spanaren för målupptäckt och koppla dem till följning på målet. Dessa utgjordes bl a av en Konsthorisont KH refererad till Flyglägesinstrumenten FLI, en Antennhöjdvinkelmarkör AHV, en Sidvinkelmarkör SVM och ett Spinnband SP refererad till sid- och höjdreglagen på HK. Piloten förberedde mållåsning genom att föra radarantennen och IR-spanarens MS, om IR valts på HK, till rätt läge gentemot DLC och DLH (sid- och höjdvinkel) samt låsmarkören, stroben (avstånd) mot centrum på DLC. I detta läge med ett eventuellt mål utanför PS operativa avståndsområde parkerade DLC på 40 km och stroben på maxläget 30 km. Om IR valts för IR-spanarinformation flyttas DLC och stroben för att inte skymma IR-presentationen.
PS manöverorgan HK hade en central roll i hur PS manövrerades i sina s k ”moder”. Dessa hade både stationär och tidsbegränsade tillstånd för vilka de förra utgjorde lägen för vapenleverans mot målen beroende på bl a störningspåverkan från målet eller annan eller ingen inverkan, d v s störfritt. Påverkande manöverorgan för de olika ”moderna var omkopplaren F0-F1-F2 för målföljning generellt, RR-IR för val av vinkelföljningsgivare (radarantenn eller IR-målsökare) samt S0-S1 för val av följning på måleko eller brusstörning. Övriga omkopplare och reglage betydelse för radarns allmänna tillstånd och har tidigare berörts och även senare när behov uppstod.
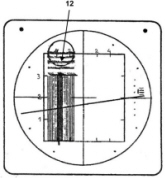
Under skedet använde Rrjal ett urval av Kommando såsom HÖJDÄNDRING, STIG, REMSOR, OSÄKERT, NYTT MÅL, ÖKA, KVARLIGG, MÅLFART, MÅLKURS, FRAM, TVÄRS samt BAK för information och/eller som order till piloten beroende på hur det taktiska scenariot utvecklade sig. Vid Kommando; MÅLFART från Rrjal angavs Målfarten i Mach (nedskalad 10 ggr) i stället för Målhöjden på Målhöjdindex och vid kommando MÅLKURS från RrJAL angavs Målkursen i stället för Beordrad kurs på KI Styrkursvisare. I slutet av skedet korrigerade vid behov piloten de på marken förinställda PS-funktioner på RP avseende antennspaning, 120-gr eller sektor 40 gr (flyttbart med HK). Han valde även 4 linjers höjdprogram (om det tidigare inte gjorts) om spaning skulle ske med IR-spanaren vilket valdes med RR/IRi IR på HK samt valde läge TYST (om detta inte gjorts initialt) på VP. Härvid sändes uteffekten i konstlast och radarmottagaren, som slavades till sändarferkvensen kunde svepas med knappen VAR på HK för spaning efter elektronisk störfri miljö vid behov. Piloten utförde Vapenval på VP, i detta inledande anfall RR för RB27. RB28 var uteslutet vid anfallsvinklar 120 gr eller mer beroende dess begränsning avseende målsökarens temperaturfönster. Valde Rrjal att leda flygplanet till en anfallsgeometri mindre än ca 120 gr och att målets IR-utstrålning var tillräcklig så att RB28 kunde nyttjas valdes ALLA, senare BL (blandat) för gruppavfyring av RB27/28 vilket kunde vara fördelaktigt mot stora mål eller mot mål sändande elektroniskt störning, s k Egenstörare ES. För prioriterad avfyring av RB28 valdes IR. Den fortsatta redovisningen och presentationen av det anfallet som här kommer att systemmässigt beskrivas är DA 140 grader varvid anfallet ej är lämpligt för RB28 inledningsvis. Efter avfyring av RB27 kan dock ett fortsatt anfall (upprepat anfall) i JK med RB28 bli aktuellt då anfallsvinkeln snabbt kan minska och bli acceptabel för RB28.
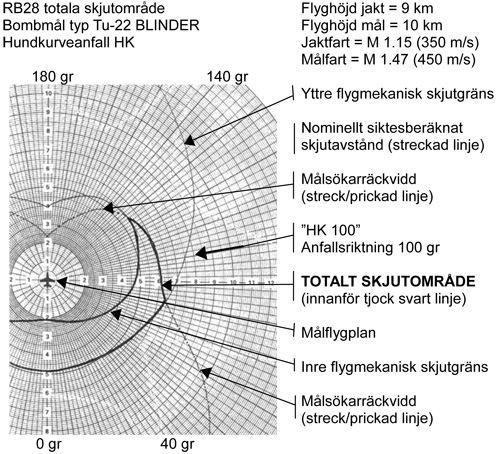
I det fall att Rrjal konstaterat att målet fällde remsstörning (eller att det kunde befaras senare i anfallet) valdes alltid anfallsriktning 180gr vid bekämpning med RB27 för att minimera risken för att störningen skulle ha så liten verkan som möjligt mot robotens verkanssystem om dess följesystem låste över på remsstörningen.
Skede MÅLSPANING (STRIL) Skede IISkedets starttidpunkten meddelades via styrdatameddelandet från RrJAL vid ca 40 km till målet. I förarkabinen indikerades skedesväxlingen med ljudton i pilotens hörtelefon för att uppmärksamma honom på detta samt i datameddelandet med att Målavståndet på AHK-indikatorn skalades om 10 ggr till att visa max 40 km. I detta läge kan IR-spanaren redan indikerat målet och visat detta på PS indikator beroende på hur kraftigt målets IR-strålning var.
Piloten startade nu radarsändaren Rr-sänd på VP och ställer mottagarens Manuella Känslighetsreglering MKR i optimalt läge på HK. Radarn spanade i valt sidprogram centrumorienterat till SVM och horisontrefererat i höjd och med AHV på HK styrbart höjdprogram med referens till DLC- och DLH-markörerna. PS indikatorn presenterade m h a SB mätavståndet nedifrån (0 km) och uppåt (40 km) med logisk avståndpresentation av målekot. Beroende på flyghöjd eller om ej höjdunderläge kunde nyttjas eller väder (moln) eller eventuell brusstörning från målet s k ES (egenstörning) förelåg valdes Linjär LIN eller Logaritmisk LOG mottagarförstärkning. LOG valdes alltid på lägre höjder för att bättre kunna urskilja målekon från mark- eller vattenreflektioner, s k klotter. Under skedet använde Rrjal i viss mån samma urval av Kommando som under Anflygningsskedet. Tillkommande Kommandon kunde vara FLERA MÅL, JAKT, BRANT, BRYT eller VARNING. Piloten avvaktade uppdykande radarmåleko, förträdesvis inom DLC. Fanns IR-målindikering visade detta rätt sid- och höjdvinkelinställning av PS antenn. När målekot uppträder på PS indikator justerades, genom manöver på HK antennens sökprogrammet symetriskt över målekot i sidled och i höjdled till maximal styrka på målekot samt stroben förs till ett lite kortare avstånd än målekot.
När målekostyrkan anses tillräcklig (IR och/eller PS) stoppar piloten antennsvepet med manöver F1 på F-omkopplaren på HK samt finjusterar den positionsstyrda antennen och IR-spanaren med sid- och höjdreglagen på HK till maximal styrka på respektive målekot.
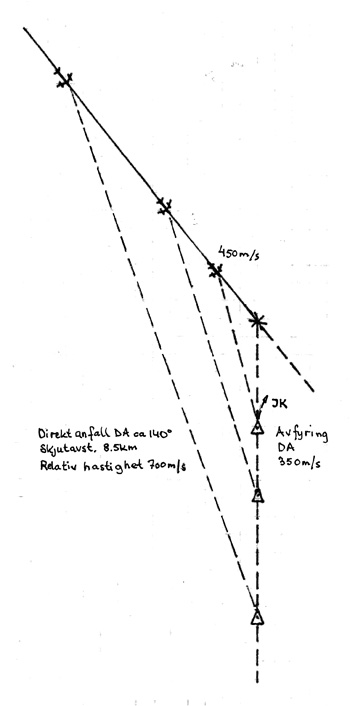
Har IR-koppling beordras med RR/IR-omkopplaren i IR på HK och tillräcklig IR-signal fanns, beordrade piloten IR-följning med manöver F0 på F-omkopplaren på HK varvid IR-spanarens MS startar följning på målet i höjd och sida och PS antenn slavades till IR MS. Åtgärden förbereder även PS för avståndslåsning och när målekot, som rörde sig mot kortare avstånd med den närmandehastighet som anfallsprofilen gav, ca 700 m/s i detta fall och stroben sammanfaller startar PS avståndslåsning med urval på målkots fram- eller bakkant beroende på val FRAM/BAK på RP i avståndsled. Om IR-spanaren inte var aktiverad, RR/IR-omkopplaren på HK i RR blir PS antenn gyrostabiliserad i rymden vid F0 och kunde ej påverkas. Genom F0-manövern gavs även låsorder till PS varvid avstånds- och antennföljningen startar i PS. Detta indikeras av PS indikator omedelbart övergår till en taktisk presentation, benämnt F-scop där initialt en av S börjar beräkna anfallsdata och presenterar en Anflygningsvinkel AV till målet och DLH försvinner samt parkeras Korsvisarens Sidvisaren utom synhåll. Höjdvisaren är sedan tidikare redan parkerad utom synhåll. Inlåsningen sker i ett insvängningsförlopp med minskande följningsauktoritet i två steg under 2 sek varefter i följesystemen inkopplades inbyggda accelerationsbegränsningar i förebyggande syfte gentemot bl a elektronisk störning ES från målet. Skedet avslutades således när IR-spanarens MS eller PS antennföljesystem samt PS avståndsföljesystem etablerat lämnade stabila måldata i avstånd, sida och höjd till S. och piloten själv tog över ”ledningen” från Rrjal i LFC.
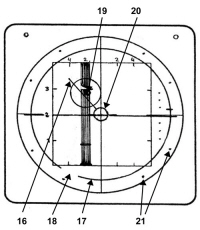
Skedet MÅLFÖLJNING (STRID) med System J35F.Detta skede inleddes när PS etablerat Rr-lås och piloten själv tog över målföljningen. PS indikatorn visar full taktiska presentationen på F-scopet på PS indikator. Tekniskt inkopplades skedet automatiskt från PS till DC när PS inledde sitt låsförfarande men kunde även väljas manuellt på PN ML till läge STRID. I båda fallen ”parkerades” Styrindikatorns Sid- och Höjdvisare utom synhåll för att inte störa presentationen på PS indikator under anfallets slutskede. Under detta skede sände STRIL fortlöpande mål- och styrinformation till flygplanet i händelse av att PS skulle ”tappa” målekot eller utsättas för elektronisk störning. RrJAL kunde även sända ett fåtal kommandon vilka enbart hade varnande och/eller stöttande syfte.
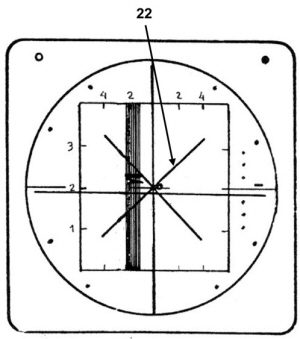
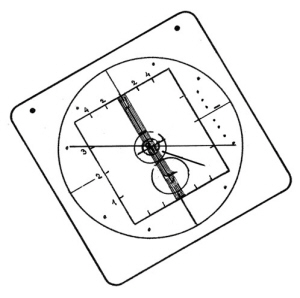
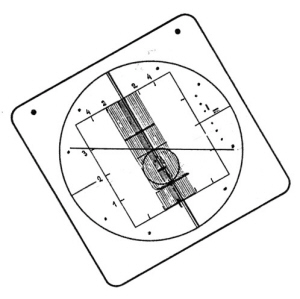
Anfall med RB27 och/eller RB28. När radarföljningen gav reella och noggranna målrörelsedata startade S det DA-beräknade anfallet vilket grundade sig på pilotens vapenval RR (RB27), ALLA (RB27/28) eller IR (RB28). S-kalkylatorns beräkningar presenterades på PS indikator de nödvändiga styrmedlen för DA vilka i huvudsak bestod av en Styrcirkel SC, som vid avvikelse från en Referenscirkel RC i centrum på indikatorn visade riktningsfelet i sida och höjd till Avfyringspunkten samt en Tidscirkel TC vars storleken angav tid kvar till densamma. Som ytterligare hjälpmedel presenterades AV enl tidigare presentation och Relativa hastigheten RH till målet som en lucka i TC. Anfallet genomlöpte successivt med flera nedräknande tidsekvenser för att automatiskt styra så att olika Prepareringar och Radarslavningar skulle genomföras till vald(a) robot(ar) för avfyring. Om målekot försvann eller blev för svagt föll avståndslåsningen varvid antennen rymdstabbiliserades och avståndssystemet gick i Minnesgång MI. Härvid försvann AV, SC och RC på PS indikator och DLH återkom. Återkom målekot på nytt med tillräclig styrka och inom avståndssystmets låslucka skedde låsning automatiskt. Om inte så kunde piloten ge stroben Hatighetstillskott HT mot målekot genom manöver F1-F0 på HK och låsning skedde sedan enligt ovan. Hann målekot avvika ur Spinnbandet SB under minnesgången måste piloten börja om hela inlåsningsförfarandet via spaningsprogrammet genom manöver F2-F0 på HK. Om PS utsattes för avsiktlig störning kunde PS själv i viss mån vara resistiv mot dessa med inbyggda filter. Men vissa typer, speciellt elektronisk störning, som från slutet av 1960- och början av 1970-talet, när s k störutrustningar utvecklades för övningsändamål och hängdes på speciella målflygplan av typ J32E krävde detta ett mer eller mindre stort engagemang av piloten att med handgrepp på HK försöka avsluta ett anfall med blandat resultat avseende träffsannolikhet för RB. I böran av 1980-talet infördes dock modifieringar i PS som lindrade verkan av dessa störningar avsevärt. Dessa åtgärder kan studeras i en notis om ”Modifieringar i avioniksystemet Hawée 1 och Hawée 2.”
I ett tidigare läge, dock senast vid denna tidpunkt hade piloten, med Spaktangenten ST på SS Styrspaken kopplat ned SA för fortsatt flygning med grundstyrsystemet.
A-preparering A-prep initierade av A-signal As från siktet ca 30 sek före beräknad avfyringstidpunkt eller genom manöver Osäkring på SS. Minsta Aprep-tid vid radarföljning var 9 sek. S RB-kraftomkopplare lämnar under Aprep-tiden förhöjd glödspänning i 9 sek och därefter normal glödspänning till samtliga medföljande RB27/28 elektronrör. PS sändare och RB mottagare genomför grovslavning till den av markpersonal förvald RB-frekvens. I fredstid inställdes en och samma frekvens kanal F i alla flygplan och i ofred kunde ytterligare fem olika frekvenser (kanal A – E) väljas och fördelas över flygplanparken enligt Stridsplan.
Indikering gavs om Osäkring ej gjorts vid As på lampor i övre synfältet på PS indikator, grön lampa för As och röd för icke Osäkrat. Denne senare slocknade vid Osäkring på SS. Hela Aprep-tiden måste genomlöpas före start av nästa sekvens. Vid införande av enkelskott IR (RB28) från 1970 minskade minsta A-prep-tid till 3 sek för RB28 samt infördes en sekvens för låg glödspänning i 15 sek efter det noshjulet fällts in vilken måste genomlöpas innan A-prep kunde starta. Under anfallet fram till nästa prepareringssekvens minskar RC till hälften vid avstånd 30 x relativa hastigheten, s k HISS-signal i detta fall ca 21 km till målet och piloten börjar stiga mot detsamma. B-preparering B-prep initierades av B-signal Bs från siktet 10 sek före beräknad avfyringstidpunkt. På PS indikator var TC lika stor som DLC samt KH delade sig dels som indikering på B-prep, dels för att mindre störa inriktningen m h a SC mot avfyringspunkten i anfallets slutskede. Minsta B-prep-tid var alltid vid PS-följning 6 sek. Vidare låste S också RB-valet till efter Avfyring eller till det att systemet Säkrades. Härvid erhölls vid val RR- eller IR dubbelskott RB27 eller RB28 och vid val ALLAdubbelskott RB27 följt av dubbelskott RB28 i en följd. Vid B-prep aktiverades även valda RB-s batterier. I RB27 startade finavstämningen av mottagarfrekvensen och avståndsslavningen gentemot PS sändre och i RB 28 dess kylsystem för dess målsökare MS. Dessa åtgärder var irreversibla och IR-kylningen var slut efter 60 sek. Batteriet däremot hade kapacitet 120 sek varför RB27 kunde utnyttjas under längre prepareringstid. För PS del blockerades återgång till spaningsläge till 30 sek efter avfyring vid RB27 vald. Vidare slavades valda RB27/28 målsökare till radarantennens pekriktning. Hela B-prep måste genomföras före start nästa sekvens.
Om B-preptiden av någon anledning, p g a att målet gjorde undanmanöver (UMAN) eller inverkan av elektronisk störning (avståndsavhakning) på PS drog ut på tiden (mer än 56 sek från As (A-prep) och RB28 fanns med i vapenvalet avbröt ABR S anfallet, låste systemet och förhindrade avfyring eftersom med RB28 kylsystem av MS var förbrukad (ca 60 sek) och presenterade det på PS indikator. Vid införande av enkelskott IR (RB28) från 1970 minskade minsta B-prep-tid till 3 sek för RB28 och vapenval ALLA ersattes med ”Blandad” BL. Vid BL-val avfyrades först en kroppshängd RB27 tillsammans med en vinghängd RB 28 i en följd. Fanns kroppshängd RB27 och vinghängd RB28 kvar i vapenlasten avfyrades dessa i en följd vid upprepat eller förnyat anfall och val BL. C-preparering C-prep initierades av C-signal Cs från siktet 1.25 sek före Avf när samtidig avfyringsmanöver gjordes på SS. Härvid startar avfyringssekvensen mot F med Parameterberäkning PAB av de olika följe- och styrauktoriteterna för vald(a) robot(ar) för det aktuella flygfallet. Dessa måste genomföras före nästa sekvens. F-preparering F-prep initieras av signalen Parameterberäkninge klar PABKLAR i S vilket medför att avfyringssekvensen fortsatte och avslutas inom 0.5 sek med att i tur och ordning Parametrarna ställs ut PASTÄLL med sina digitala värden från S och att sedan Parametrarana ”sprängs” PASPR och blir irreversibla i robotens avionik. Vidare osäkras robotarnas stridsdel samt utlöses dess hydraulkraftssäkring. För RB27 inställs även robotens fram- eller bakkantföljning samt evntull ZON-rörsfördröjning. Sekvensen avslutas med att tändsignal TÄND går ut från S till vald(a) RB 27/28. En viss precision krävdes i siktesberäkningarna i slutfasen varför robotarna måste avfyras vid rätt tillfälle för att optimal träffsannolikhet skulle erhållas för bekämpning av målet. Avfyringssignal till RB gick därför automatiskt när piloten höll avfyringsknappen intryckt och Cs initierades.
Avfyringsfasen avslutades med att Styr- och Tidscirkeln på radarindikatorn ersattes av ett Kryss samt luckan i KH fylldes varefter, med 0.5 sek fördröjning krysset försvann och siktet beräknade för ett upprepat andra anfall i Jaktkurva JK. Härvid utförde S automatiskt nytt vapenval beroende på vad RB-typ som fanns kvar i lasten samt gick över i s k JK-koppling. Presentationen på PS indikator utgjordes av att SC visade avvikelsen från rätt riktpunk och TC vidgade sig och visade tid kvar till kollision med målet. I JK var hela tiden alla skjutvillkor uppfyllda och avfyring kund när som helst ske om ny B-prep initierats och genomflutit. Härvid måste dock piloten väga in om ett upprepat anfall (andra anfall) syntes möjligt om bedömt nyvalda robotars MS kunde fånga målet eller att inte inre skjutgränsen för RB flygförmåga inta passerats senast 6 sek därefter.
Avfyringspunkten i tid sett i DA var så beräknad att RB27 och RB 28 skulle lämna flygplanet mitt mellan yttre och inre skjutgränsen för det aktuella flygfallet. Härför preseterades inte dessa gränser. Därmed blev också inriktningsfelet, avläst på SC inte så kritiskt förutsatta att målet gick på rak bana till träff. Vid mer eller minder styrfel fanns då utrymme för RB att ändå hinna svänga in till rätt bana i sin syftbäringskurs. Om målet däremot avvek i kurs (undanmanöver UMAN) under RB-s gångtid var marginalerna för avvikelse i inriktningen små för god träffsannolikhet. Beroende på måltypens benägenhet att kunna göra UMAN vilket var avhängligt av, dels dess möjlighet att initialt identifiera jakten med hjälp av varningsystem, dels målflygplanets manöverförmåga (bomb- eller attackflygplan) och dels beroende på företagets art avseende på viktigheten att bekämpa dess måls kontra bränsletillgång och aukionsområde strävade piloten för den skull alltid efter att inte ha ett större inriktningsfel på SC än 2.5 grader vid avfyring, d v s TC 0 sek.
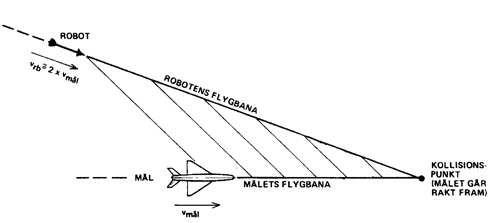
RB27 och/eller RB28 accelererade när den lämnade flygplanet till M 3.0 (inkl flygplanets fart) och styrd sedan med s k ”syftbäringskurs” mot en kollisionspunkt med målet. Efter ca 6 sek (ca 9 km robotgångsträcka) detonerade robotens(arnas) sprängladdning från signal från Radarkänsliga ZON-rörsutlösning vid nära målpassage (RB27) eller vid anslag i målet (RB27 och/eller RB28).
Kollisionsvarning kunde inträffa om vissa kriterier för denna risk förelåg. Funktionen bestämdes av relativa hastigheten till målet. Var den mindre än 160 m/s inträdde varningen KOLL vid avståndet 800 m. Var relativa hastigheten 160 m/s eller mer räknade S för ett varningsavstånd på 5 gånger aktuella relativa hastigheten, i detta fall ca 1800 m. Detta visa att relativa hastigheten då är ca 500 m/s och att DA-vinkeln minskat
Efterföljande anfall med RB24B kunde beordras av Rrjal om RB24 fanns i lasten och lämpliga mål fanns tillgängliga. Upptakten för detta skedde via styrdatmeddelande från Rrjal med Kommando; NYTT MÅL. Åter startade ”Skede I” följt av ”Skede II” med alla nödvändiga data och kommandon som vid ovanbeskrivna DL. Ledningsinformationen i Rrjal-s styrdatameddelanden beordrade alltså på nytt skede ANFLYGNING (Skede I) vilket efterföljdes av skede MÅLSPANING (Skede II) till utgångsläge för KA, 90 grader tvärs målbanan. Skede MÅLFÖLJNING (STRID) inleddes sedan vid radarlåsning när radardata började sändas till siktet varvid jaktpiloten åter övertog ”Ledningen”. Beräkning av KA- profilen gjorde piloten med ledning av presentationen på radarindikatorn dels med PS-följning på målet eller med B-skopsinflygning. S räknade, med ledning av vapenvalet RB24 för HK-anfall och presenterade det på radarindikatorn eller i gyrosiktet. En detaljerad information om KA-profilen och inflygningen i HK samt skjutgränser och robotbana för RB24, se artikel FPL35 Draken, SAAB 35 – 35BD avsnittet Anfall med Robot RB24. Till skillnad från J35BD presenterade dock inte S skjutgränser på PS indikator vid PS-följning utan piloten fick använda tumregler för dessa ur minnet. Presentationen gav dock bra avstånds- och inriktningsingivelser samt tid kvar till kollision med målet vilket visades på SB, SC och TC.
Från 1977 ersattes RB24B med RB24J som var en modifierad och uppdaterad variant av Sidewinder-robotfamiljen. Ytterligare information om denna, se artikel FPL35 Draken, SAAB 35 – 35BD avsnittet Om Robot RB24J. Problemet med inriktningen p g a RB24J snävare MS avhjälptes dock i J35F med att den s k aim point inmodifierades i S siktehuvud och uppspeglades för piloten i ordinarie reflexglas. I början på 1980-talet modifierades flygplaninstallationen i J35F för att kunna vingmontera RB24J som alternativ till RB27/28.
Visuell inflygning med RB28. Anfall med RB28 utan PS-följning i HK via gyrosiktets riktmärke blev aktuellt från mitten av 1970-talet efter införande av modifiering för enkelskott IR i systemet. RB28 gjordes därmed betydligt snabbare tillgänglig för avfyring, nu max 6 sek och prestanda beräknades för HK. Detta visade bl.a. RB28 MS medgav att betydligt större anflygningsvinklar än BB24 kunde nyttjas. Anfallsmetodiken med ledning från marken och den egna målföljningen var lika som för RB24 men piloten behövde ej tvingas in i målets baksektor utan kunde välja en mer offensiv HK.
Efterföljande anfall med AKAN kunde också beordras av Rrjal om lämpliga mål fanns tillgängliga. Ledningen för detta under Skede I och II utfördes på samma sätt som med RB24B avseende kommandon via styrdata. Anfall med AKAN mot nytt mål genomgick samma procedur som med RB24B, d v s KL följt av ett KA som leddes av Rrjal med styrdatameddelanden fram till att piloten fick radar- och/eller visuell kontakt med målet och tog över ”Ledningen. Beräkning vid JK utfördes genom visuell kontakt med målet med S gyrosikte. Funktionen valdes med AKAN VP. JK som anfallstyp karaktäriseras av att jaktflygplanet under sväng riktades mot en beräknad träffpunkt framför målet som vid DA. Härvid kom jaktflygplanet att beskriva en krökt bana. Träffpunktens läge relativt målet var beroende av målavståndet och syftlinjens vinkelhastighet, d v s flygplanets sväng rörelse. Som grundinställnig för beräkningen av förhållningen till målet förinställdes målets uppskattade spännvidd på ett graderat vred på sikteshuvudet. Piloten styrde sedan flygplanet så att riktmärkets mittpunkt låg på målets och reglerade kontinuerligt en ”ruteresscirkel”-s diameter runt målets yttersta delar under anfallet med ett vridreglage på RK. Efter att piloten osäkrat systemet Osäk gjordes Avfyring manuellt på SS varvid AKAN- projektilerna (20 st/sek) lämnade flygplanet. Dess sprängladdningar detonerade sedan vid anslag i målet. 90 AKAN-skott fanns i magasinen och var förbrukade efter totalt 5 sek avfyringstid.
Skede STRID avslutades efter säkring av vapensystemet och när jakten svängt undan från det sist bekämpade målet. Vid val RR (RadarRobot RB27), BL (Blandad RB27/RB28 Vid val av RB27 var 6 sek och 3 sek vid val RB28.
Skedet ÅTERFLYGNINGHela detta skede genomfördes med samma utrustning och med samma funktion som i J35BD. Det inleddes med kommandon från Rrjal i Fas 1 och fortsatte i Fas 2 med information från flygplanets Navigerinsutrustning i NAV- funktion och pilotens val av NAVRIKT, NAV 400 och NAV 40 med av DC framräknade planébanor och avslutades med information från funktionen LANDN avseende inflygningsbanor. Hela förloppet beskrivs i artikel FPL35 Draken, SAAB 35 – 35BD avsnittet Skedet ÅTERFLYGNING.
Skede KLARGÖRING.Klargöring av J35F för nytt jaktuppdrag var normalt avklarat på mindre än 10 minuter ofta med piloten kvar i kabinen (om inget tekniskt fel behövde åtgärdas) varvid Jaktcykeln var sluten när flygplanet anmäldes flygklart igen och en ny cykel kunde börja….
Ett jaktuppdrag med J35F kunde alltså, när alla delar i Jaktprofilen fungerade som de skulle, genomföras utan att ett enda ord sades mellan markorganisationen och jaktflygplanet vilket hade kunna avlyssnats och röjt uppdraget. Och ändå fick piloten alla nödvändiga data och direktiv i alla delar av uppdraget för att komma till ett säkert utgångsläge för anfall mot och bekämpning av det utvalda målet samt att återflyga till och landa på en lämplig flygbas. Samtidigt bidrog de markbundna Styrdatasändarnas höga uteffekt (endast en tiondel nyttjades under fredstid) och den bakåtriktade antennen i flygplanet för datamottagning till att styrdatasystemet var mycket svårt att avsiktligt störa ut. Detta System J35F utvecklades ytterligare något i J35J när det, med bl.a. sitt modifierade beväpningssystem togs i bruk i slutet av 1980-talet
Skribent Göran Hawée
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||





.jpg)