|
|
 |
| |
Siktessystem JA37
Siktesberäkning
Automatkanon och Robot
|
|
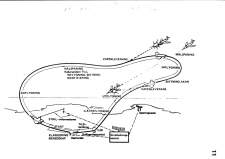
JA37 Jaktprofil princip
Större bild
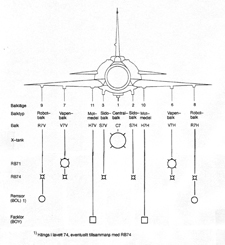
JA37C beväpningsalternativ för jaktuppdrag
Större bild.
|
Allmänt
Viggenflygplanet
JA37 var utrustat med ett siktessystem för Optisk
inriktning av vapen och som beräknades i flygplanets Centraldator
CD-107 samt presenterades med
dess Elektronisk Presentationssystem
EP-12. Som komplement
användes data från Siktesradar PS-46
vilken levererade nödvändiga
data till CD för beräkningen och presentationen. Systemet var
utvecklat av Svenska Aeroplanaktiebolaget SAAB tillsammans med annan
militärindustri i Sverige på uppdrag av Försvarets Materielverk FMV.
Siktesfunktionen benämnes
här Siktning och ingick som en del i flygplanets
beväpningssystem vid taktiskt uppdrag. Systemet föregicks i uppdraget av
Inflygning och Vapenval samt efterföljdes av
Vapenleverans vilka kortfattat beskrivs nedan i sina
sammanhang.
Den vapenarsenal JA37 var
utrustad med från utvecklingen och vid
leveransen till Flygvapnet från 1979 utgjordes av Automatkanon AKAN,
Jaktrobotarna
RB71
och RB74
eller Jaktrobotar
RB24J.
Den senare ersattes successivt efter
hand av RB74.
AKAN var monterad i en AKAN-box,
i sin tur monterad centralt under flygplankroppen medan robotarna var
hängda i balkar (RB71) och/eller i lavetter (RB74/24J) snett under
flygplankroppen eller under vingarna. De olika hängningsalternativen
framgår av bild i
JA37 Viggen,
notis 2 .
Från mitten av 1990-talet
modifierades ett antal JA37 till en variant benämnd JA37D där
bland annat en uppdaterad
CD
207 tillsamman med en ny
Vapendator ANP37 och en datalänk till respektive innerbalklägena
infördes. Detta var nödvändigt för att systemet skulle kunna kommunicera
och aktivera bland annat nytt vapen RB99 och störkapsel U95. De olika
hängningsalternativen framgår av bild i
JA37 Viggen,
notis 2 .
För att skilja JA37D
från de omodifierade flygplanen JA37 fick
dessa versionsbeteckningen JA37C.
Siktesfunktionerna hade till uppgift att med hjälp av inmätta
radardata och med elektroniska symboler på Siktlinjeindikatorn SI
och Målindikatorn MI i EP-12 presentera för flygföraren den
nödvändiga information som behövdes för de olika anfallstyper som
krävdes för anfall med AKAN och robotarna
RB71 och RB74 eller RB24J
samt senare RB99. Det skulle
också förse Styrautomat SA-07
med data för stöttning när Automatsiktning vid AKAN-siktning var vald
för att ge ökad träffsannolikhet.
Optisk inriktning mot målet, eller så kallad Takometrisk
mod nyttjades då radarföljning inte var tillgänglig.
Siktessystemet betjänades av flertalet, dels fristående system
med egna presenterande funktioner och dels av system enbart för
siktningsfunktionerna. Dessa lämnade data till CD för att denne
skulle kunna utföra siktesberäkningar för det taktiska flyguppdraget på
de olika indikatorerna.
I siktessystemet ingick följande enheter;
-
Centraldator CD-107/207
-
EP-12 Siktlinjeindikator SI
-
EP-12 Mållindikator MI
-
EP-12 Taktisk indikator TI (JA37C)
-
Vapeniställarpanel VIP
-
Vapenpanel VP
-
Vapentablå VT
-
Gasspak GS
-
Siktesradar PS-46
-
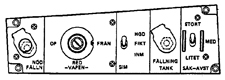
Systemtablå ST
-
Styrspak SS
-
Anpassningsenhet ANPC (JA37C)
-
Anpassningsenhet ANP71 (JA37C)
-
Anpassningsenhet ANP37 (JA37D)
-
Kursindikator KI
-
Flygradio FR-29 (STRIL)
-
Styrautomat SA-07
|
|
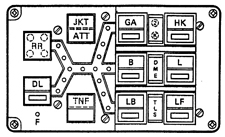
Systemtablå ST i JA37C
Större bild.

SS med OPT-knapp
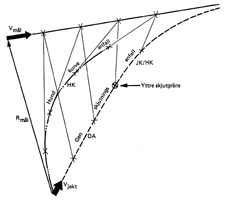
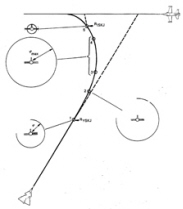
Profilbild av GA- och HK-anfall, princip.
Större bild |
Uppbyggnad och
Funktion
Allmänt.
Ett
normalt uppdrag började med Anflygning med styrorder från
STRIL via FR. Knappen DL var då
tänd på ST monterad till höger på
instrumentpanelen i kabinen. Skedet följdes av
Inflygning med styrorder från egen PS (DL på ST släktes).
Övergången skedde automatiskt om PS startats (knappen RR på ST
trycktes in och tändes) och etablerade följning på målet. Inkommande
kommandon från Stridsledningen STRIL presenterades då fortfarande på
TI och STRIL-styrorderna presenterades hela tiden på MI,
SI och TI, parallellt med styrorder beräknade från PS-data.
Genom intryckning av DL (som tändes) på ST kunde återgång till
Anflygning ske. PS-funktionen bröts dock inte utan styrorder
från PS kunde återväljas med knappen RR på ST.
Inflygning.
Allmänt
I inflygningsmoden
kunde Radarrobot
RB71
och eventuellt IR-robot
RB74
avfyras på så stora avstånd att målet inte kunde ses optiskt. På kortare
avstånd till målet valdes som regel optisk siktesmod till exempel med
OPT-knappen på SS. I siktesmod var Jakt IR-robot
RB24
eller Automatkanon AKAN de vapen som utnyttjades i första hand.
Nödvändig presentation visades i SI.
Anfallstyper
Inflygningen bestod
i huvudsak av två anfallstyper,
Genskjutningsanfall GA eller
Hundkurveanfall HK.
GA
var automatiskt förvalt vid PS tillslagen och radarföljning i 3
koordinater 3K (sida, höjd, avstånd), så kallad Kontinuerlig
Följning KF vilka indikerades på ST (lampa GA tänd). Även
HK indikerades på ST och valdes på denne manuellt
vid 3K-följning eller automatiskt när PS hade 2K-följning (sida,
höjd). Styrorder för inflygningen beräknades i CD med
målinformation från PS och bestod av kommenderad ban- och
färdvinkel och presenterades på SI och MI samt på TI
och KI.
GA bestod av
ett
Direktanfall DA
fram till det valda vapnet yttre skjutgräns. Därefter övergick systemet
till att presentera
Jaktkurva JK.
|
|
Presentation Inflygning SI
Större bild
Presentation Inflygning MI
Större bild |
Presentationer
Styrorder för inflygningen
beräknades i CD med målinformation från PS. Styrordern
bestod av kombinerad ban- och färdvinkel och presenterades i SI
och på MI, TI och KI. Presentationen i SI
bestod av en Följemarkör och i MI av en
Styrordermarkör.
På SI var presentationen
samma som vid Navigeringsmod, se
Navigeringssystem JA37, Brytpunktsnavigering
med följande undantag;
-
Följemarkör ersätter färdvinkeln.
-
Målutpekningssymbol RR-Mus om PS
målföljer i KF.
-
Avståndsskala med skjutgränser och ”L” vid
PS i KF.
-
Vald robot identifieras, 24/74/71 samt 99
(JA37D)
En linje visades vid avståndsindexet på
skalan vars längd visade målhastigheten och dess riktning om anfallet är
fram- eller bakifrån.
På MI erhölls
samma information som i SI och om RB 71
var vald identifierades den med texten SMAL eller BRED (dopplersvep).
Avfyringskryss
visades i SI och MI när Avtryckaren på styrspaken
trycktes in. Krysset släcktes vid robotskjutning när dessa separerat
från flygplanet samt när Avtryckaren släpptes vid AKAN-skjutning.
|
|

Presentation av skjutgränser på SI och MI. |
Skjutgränser och styrfelscirkel.
Skjutgränserna beräknades
i CD. De utgjorde yttre och inre skjutgräns för valt vapen och
presenterades i SI och MI.
Vid siktesmod
AKAN jakt
fanns två varianter. Den ena var vid låst
PS då yttre skjutgränsen motsvarade 3 sekunders projektilgångtid och
inre gränsen för att ge minst 150 meter (100 meter i bakanfall)
passageavstånd till målet.
Den andra varianten var utan PS-låsning,
så kallad takometrisk mod. Yttre- och inre gränserna utgjorde här
konstanta schablonvärden, 1000 respektive 200 meter.
|
|
Styrfelscirkel
storlek på MI |
Vid robotskjutning
skedde kontinuerlig beräkning av
skjutgränserna och framförhållning vid 3K-data från PS.
Vi endast 2K-data eller ingen måldata
från PS beräknades schablongränser med antagna parametrar. Vid
målpassage innanför yttre skjutgränsen visades en hel Styrfelscirkel på
MI vars varierande radie utgjorde maximalt tillåtet styrfel.
Denna varierade så att den blev större på närmare målavstånd och tillät
större styrfel. För att sedan minska igen vid närmandet av inre
skjutgränsen där den hade minsta radien.
|
|
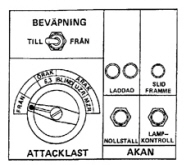
VIP i höger apparatrum
VP i förarkabinen
till höger
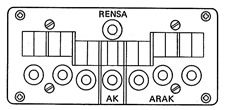
VT (JA37C) till
vänster på instrumentpanelen
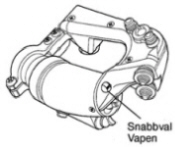
GS (JA37D) med Snabbvalsknapp |
Vapenval.
Allmänt
Olika vapensystem
som ingick i JA37C var;
I
vapensystemet ingick funktioner
för;
Identifiering och presentation av hängd last
-
Val av vapen
-
Bekräftning av vapenval.
-
Osäkring och Avfyring
-
Fällning av last
Tillslag av vapensystemet
gjordes med en omkopplare BEVÄPNING på
VIP i höger apparatrum av markpersonalen.
På VP till höger
i kabinen fanns en omkopplare för val av Vapenfunktionerna Operativ
eller Reducerad eller Fiktiv vapenlast. Övriga strömställare var för
Fällning av Xtra X-tank, Nödfällning av hängd last och val av
Säkerhetsavstånd.
Robotlavetterna identifierade sig automatiskt
från respektive balklägen;
-
Lavett 71
-
Lavett 71 + RB71
-
Lavett 74 (24J)
-
Lavett 74 + RB74 (24J)
För
vapenval och presentation av
hängd last utnyttjades VT på instrumentpanelen (JA35C).
Presentationen
av monterad robot och hängningsplats visades i
sifferfönster, två för varje robot och med siffran för respektive
robottyp samt aktuell robotbalk.
Var AKAN laddat
erhölls i ett fönster uppgift om antalet sekunder det fanns ammunition
laddat för uppdraget eller kvar efter tidigare avfyring. Vid maximalt
antal patroner, 120 stycken i magasinet och för 20 skott/sekund skrevs
siffran 6 i fönstret.
Vapenvalet
gjordes på VT med tryckning en speciell
knapp under varje par av sifferfönster. I JA37D ersattes all funktion
för VT med med en ny TI.
Alternativ valmöjlighet gjordes på GS till vänster i
kabinen med en till mittläget återfjädrande trelägesomkopplare. I läge
”uppåt” valdes AKAN och i läge ”nedåt” valdes robot vilket som tidigare
nämnts indikerades också på TI och i MI.
Vid vapenval ROBOT från GS valdes, om inget förval gjorts
på VT dessa efter prioriteringsordningen RB-74 – RB-71. Snabbval
RB-74 gav dubbelval om robotar fanns hängda på båda sidor under vingarna
på flygplanet. Om enbart RB-74 var hända i samtliga balklägen
resulterade snabbvalet i tur och ordning robotarna under yttervingarna,
sedan under innervingarna och sist under kroppen, i samtliga fall först
vänster och sedan höger.
Förval av kombination av robotar kunde göras på VT,
enkel- eller dubbelval. Förvalet kunde även vara ”blandat” (IR- och
RR-robotar) eller ”dubbelt” (två lika robotar). Specifikt vid ”blandat”
val var att ordningsföljden styrdes av valordningen på VT.
”Rensning” av respektive vapenval gjordes med knappen RENSA på
VT eller RENS på TI (JA37D).
|
|

SS med OS/S-bygel och AVF-knapp |
Fiktiv vapenlast.
Funktionen valdes genom att Vapenomkopplaren på VP
ställdes i FRÅN. Lasten kunde bestå av hängd last eller inmatad
standardlast med sju alternativ. I alla dessa förutsattes att AKAN
ingick och var laddad med 120 skott.
Vid
fiktiv mod var vapenfunktionerna utanför CD bortkopplade och
inget vapen kunde avfyras. I övrigt motsvarade indikeringarna och
funktionerna nästan de operativa.
Osäkring OS och Säkring S av systemet gjordes med
Säkringsbygeln och Avfyring AVF med avtryckaren på SS.
Förutsättningen för att OS- och AVF-signalerna skulle
matas till ett vapen var att vapenval gjorts. Öppen Noshjulslucka eller
vapenmodsvredet i läge FRÅN på VP förhindrade hårdvarumässigt
aktivering av OS och AVF till CD och vapenbalkarna.
Säkringsbygel/Avtryckaren var anslutna till ANPC och
ANP71 i JA37C och ANP37 i JA37D och programvara i dessa
styrde dess villkor ut till respektive vapenbalkar.
Avtryckarfunktionen hade självhållning för samtliga vapen utom AKAN.
AVF-krysset presenterades när Avtryckaren trycktes in och släcktes
när vapnen separerat från balken.
|
|
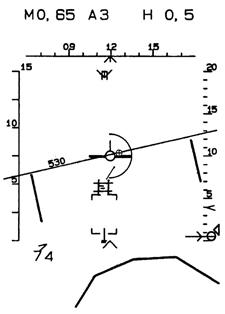
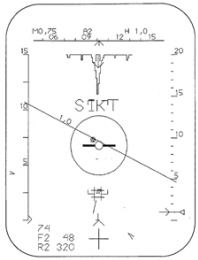
SI presentation AKAN Jakt
SI presentation AKAN Jakt
Större bild.
|
Siktning och
Vapenleverans.
Allmänt.
Normalt skedde siktning vid optisk sikt. Om PS målföljde
mot luftmål kunde siktning i optisk siktesmod (OPT-mod) ske mot
målsymbolen (RR-mus) i SI. Valet av mod gjordes, som tidigare
nämnts med OPT-knappen på SS vilken hade en växlingsfunktion
varannan gång mellan optisk Siktesmod och Styrordermod.
AKAN Jakt
Radarmod.
För moden krävdes att PS hade kontinuerlig följning i de
3 koordinaterna avstånd, sida och höjd, 3K-data. Moden erhölls
automatiskt vid PS-låsning i siktesmod AKAN Jakt.
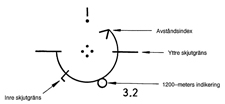
Presentationen i SI bestod av en riktprick med spårlinje,
cirkulär avståndsskala med skjutgränser, digitalt målavstånd samt PS
målutpekningssymbol (RR-mus). Övriga flygdata (höjd, fart och
banvinkellinjer) visades som i andra siktesmoder.
Riktpricken bestod av en punkt i avståndsskalans centrum när
målavståndet är inom skjutgränserna, i annat fall av fyra punkter.
Skjutgränserna hade fasta lägen: Yttre skjutgränsen vid ”kl 3”,
och inre vid ”kl 7.30”. Värdet på inre gränsen bestämde skalningen för
avstånd som var mindre än inre skjutgräns. Skillnaden mellan yttre och
inre gränserna bestämde skalningen på resterande delen av skalan.
När avståndsskalan var en hel cirkel var avståndsindex parkerat
vid max skala ”kl 9” vilket inträffade vid ett målavstånd vars storlek
berodde på anfallsgeometrin, vilket innebar > 4 km i baksektorn och >
5-6 km i framsektorn. Avståndet visades digitalt i hela km vid parkerat
avståndsindex, därefter med decimal.
På utsidan av cirkellinjen visades ett runt index (liten
cirkel) som utgjorde målavståndet 1200 meter. Indexet gav antydan om
aktuell skalning och värdena på yttre och inre skjutgränserna.
Vid AVF tändes ett +-tecken framför avståndpresentationen.
Utstyrningen av riktpricken beräknades ur akanprojektilens
utskjutningsriktning med förhållning beräknad från PS inmätta
Målrörelsemodell MRM.
Spårpunkten beräknades och visades i SI efter OS.
Från riktpricken ritades en spårlinje till spårpunkten. Flygplanet
styrdes så att riktmärket kom på målet och med spårpunkten på målet
gjordes AVF.
|
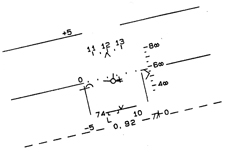
|
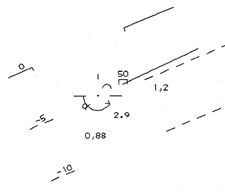
SI-presentation vid takometrisk mod
Större bild

SI presentation av
schbloninställda lägen
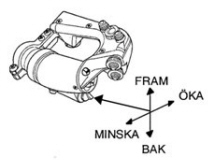
GS med avstånds- /spännviddsomkopplaren |
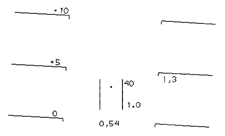
Takometrisk mod.
SI-presentationen i siktesmod utan PS-låsning,
takometrisk mod, bestod av en riktprick med spårlinje vilken var släckt
i FRAM. På ömse sidor om pricken fanns spännviddsmarkeringar i form av
två stolpar med digital angivelse av målspännvidd i meter och målavstånd
i km till höger. Även höjd och fart visades digitalt.
Övergång till takometrisk mod från PS-mod enligt
följande;
-
Upplåsning av PS-följning på målet
-
Påverka avstånds- /spännviddsomkopplaren på GS.
-
PS-följning upphör på grund av minavstånd för PS.
Vid
tappad PS-följning låg PS-mod kvar på minnesgångsdata i några
sekunder för övergång till takometrisk mod.
Följande schabloninställningar av avstånd och målspännvidd kunde
utföras;
-
Litet skjutavstånd BAK. Målspännvidd 15 meter, avstånd 600 meter
-
Stort skjutavstånd BAK. Målspännvidd 14 meter, avstånd 1200 meter
-
Stort skjutavstånd FRAM. Målspännvidd 40 meter, avstånd 1800 meter
Val
av schabloninställningarna gjordes med
avstånds-/spännviddsomkopplaren på GS. Upprepade tryckningar
nedåt (BAK) gav växling mellan stort och litet skjutavstånd BAK. Vid
detta val kunde manuell avståndsinställning göras genom att omkopplaren
fördes mot MINSK eller ÖKA. Avståndet begränsades inom intervallet
200-1500 m vid val BAK och 450-2000 m vid stort BAK.
Initialsättningen gjordes med ”litet skjutavstånd BAK” vid val av
siktesmod AKAN och vid snabbval PS.
|
|

Avbrytkommando |
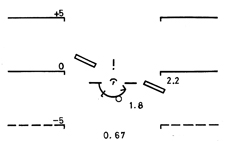
Avbrytkommando och passageavstånd.
Avbrytkommando presenterades i följande moder;
Avbrytkommandot
tänds i SI 1 sekund före inre skjutgränsen och när
gränsen passeras börjar kommandot blinka.
Villkor
för avbrytkommando är följande;
eller
eller
Passageavståndet
presenteras i SI när avbrytkommandot tänds. Det presenteras i
meter på platsen där det digitala avståndet normalt stod. När
min-avståndet till målet passeras tänds passageavståndet upp och
kvarligger i 5 sek.
|
|
SI-presentation vid AS
|
Automatsiktning AS.
Allmänt
AS
kunde endast kopplas in i AKAN Jakt och PS-låsning för att
avlasta styrningen vid anfallet och öka träffsannolikheten. AS
var främst avsett för anfall mot rakbanemål i dess FRAM-sektorn och vid
anfall i dess BAK-sektorn. Flygplanet styrdes grovt i tipp och roll mot
målet medan sedan SA skötte finstyrningen i tipp och gir.
|
|
Inkopplingsknapp AS på SS
|
In- och urkoppling AS
Inkoppling
erhölls bland annat vid villkoren;
-
Flyghöjden är < 8 km
-
Flygplanets hastigheten är mellan 400 km och M 0.92
-
AKAN Jaktmod vald
-
SA i SPAK-mod
-
PS-följning i siktesmod.
-
Målavståndet > inre skjutgränsen
-
OS
aktiverat
-
FRIGÖRINGS/AS-knappen på SS trycks in
Urkoppling
erhölls vid bland annat villkoren;
-
FRIGÖRINGS/AS-knappen på SS trycks in
-
Någon av inkopplingsvillkoren upphör.
-
Avtryckaren på SS släpps vid < 2 sek kvar till inre
skjutgräns.
Styrorder vid AS
Flygplanet styrs så målet kommer inom avståndscirkeln i SI.
Vid säkrad PS-följning i 3K och efter OS kopplas AS
in samt styrs manuellt i tipp och roll. När träffvillkoren var uppfyllda
gjordes AVF. AS kopplades ur och flygplanet
undanmanövrerades. Styrorderna behövdes inte styras med precision För
bästa resultat var det snarare viktigt med mjuk styrning av flygplanet.
Funktionerna för skjutgränser, avbrytkommandon och passageavstånd vid
AS var detsamma som vid manuell PS-mod.
|
|
SI presentation vid robotval
Större bild
Avståndsskala i SI
Förlängningslinje i SI |
Robot jakt.
Optisk siktning för robotar skedde utan förhållning både i PS-mod
och i mod utan PS-låsning. För samtliga robottyper lades
riktmärket attitydsfast i flygplanet X-axelriktning. För RB74 slavades
målsökaren MS vi OS till PS om RR-mus presenterades, i
annat fall till riktmärket.
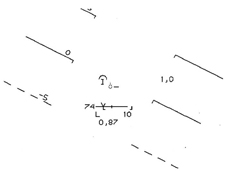
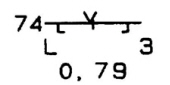
Vid PS-följning visades i SI en RR-mus och avståndsskala
med mittindex och skjutgränser. Aktuellt avstånd visades med ett ”V”
eller ett ”ruteress” (beroende på målidentitet) på avståndslinjen. Det
avstånd som linjen representerade visades digitalt till höger om linjen,
3, 10, 30 och 60 km. Vid avstånd >60 km släcktes linjen. Omskalning till
3 km erhölls inte vid närmandehastighet <250 m/sekund.
Skjutgränsmarkörer presenterades på avståndslinjen.
RR-musen visades i SI vid PS-följning på mål. Symbolens
utstyrning var begränsad till 2,5 grader från fartvektorn eller
riktpricken. Var avvikelsen större än >0.5 grader visades en
förlängningslinje från RR-musen mot målet. Om avvikelsen var >10 grader
i Siktesmod tillkom digital information avrundat till närmaste 10-tal.
Digital presentation av vinkeln till IR-mål visades endast i Siktesmod.
|
|
MI presentation i siktesmod
Större bild
|
På MI har presentationerna vid siktesmod presenterat generellt
under avsnittet om Skjutgränser och styrfelscirkel ovan. Bortsett från
de primära presentationerna för inriktning fanns på MI ett
flertal presentationer som berörde målläge och avstånd till målet samt
övrig måldata som bland annat gav information om dess storlek. Ävenså
presenterades styrorder från STRIL, flygplanets flygläge, höjd och fart
samt vapenval.
Skrivet
av Göran Hawée
Senast
uppdaterad 2020-11-09
|