|
|
 |
| |
Navigeringssystem
JA37
Tröghetsnavigering TN |
|

JA37 med RB71 och RB24J samt Extratank och AKAN. |
Till flygplan
JA37
kom att installeras ett navigeringssystem som
vidareutvecklats från
AJ37
navigeringssystem där flygplanets dator
CD-107/207 var huvudenhet
för sammanställningar av olika primärdatagivare samt beräknade de
parametrar som var av betydelse för ett navigeringssystem som kunde
medverka till att flygplanet kunde flyga i alla väder och mörker med
hjälp av inmatade färddata på marken och i luften.
Försvarets Materielverks Flygplanbyrå FMV-F tillsammans med
Flygvapenchefen CFV-s Flygavdelning utverkade en specifikation på
funktioner och uppdraget att utveckla systemet gick till Svenska
Aeroplan Aktiebolaget SAAB.
Datagivare för systemet var bland annat ett
TN-system IME,
Luftdatasystem LD-5, och
Taktiskt Landningsystem
TILS.
Utdata presenterades bland annat på Elektroniska
Presentationssystemet
EP-12.
I navigeringssystemet ingick följande samarbetande
enheter;
-
Dator CD
107/207
-
TN-system IME (Inertial Measurement Equipment)
-
Luftdataenhet LD-5
-
Anfallsvinkelgivare
AG
-
Taktiskt
Landningssystem TILS
-
Styrdata SD
(markinformation från STRIL)
-
Jaktlänk
JL (information två flygplan emellan)
-
Navigeringspanel
NP
-
Datapanel DAP
-
Systemtablå ST
(JA37C)
-
Knapp OPT FIX OF
-
Knapp OPT-LAND MOD
OLM
-
Flyglägesindikator
FLI
(från IME)
-
Reservkursanläggning RK
-
Reservkursinstrument KI (från IME
eller reservkursgyro)EP-12
-
Siktlinjeindikator
SI
-
EP-12 Målindikator MI
-
EP-12 Taktisk
indikator TI (JA37C)
-
Styrautomat SA-07
-
Radar RR PS-46
-
Bränslemängdindikator
BMI
-
Global Positioning
System GPS, JA35D, vissa fpl.
|
|
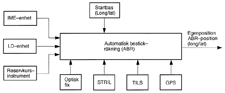
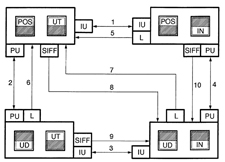
Principblockschema navigeringsfunktionen.
Större
bild
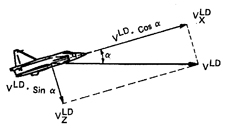
Fartvektor, princip
Större
bild
|
Uppbyggnad
och Funktion
Navigeringssystemet
var uppbyggt så att det betjänades av flertalet, dels fristående
system med egna presenterande funktioner och dels av system enbart för
navigeringsfunktionen. Dessa lämnade data till CD för att denne
skulle kunna utföra navigerings- och bränsleberäkningar för flyguppdrag.
Navigeringsfunktionen baserade sig på så kallad automatisk
bestickräkning ABR vilket i huvudsak innebar att flygplanets dator CD
med kännedom om startbas, fart och kurs kontinuerligt beräknade
flygplanets position i longitud och latitud, LOLA. Informationen om fart
erhölls från IME och från LD och om kurs från IME
och RK.
På grund av systemofullkomligheter kom den beräknade positionen
under flygning att avvika från flygplanets verkliga position. Felet
korrigerades genom så kallade FIX-tagningar, vilket innebar att man
manuellt med så kallad Optisk FIX eller SD FIX eller automatiskt
genom GPS – eller TILS FIX tillförde en korrektion så att
systemets uppfattning om positionen åter överensstämde den verkliga
positionen.
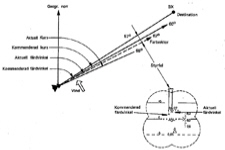
Navigeringsberäkningen krävde för att CD skulle kunna
utföra ABR att flygplanets markrefererade Fartvektor
(färdhastighetsvektor) V0 beräknades ur de IME mätta
hastigheterna vilka beräknades i ett markrefererat koordinatsystem men
skilt ifrån det norrefererade.
Flygplanets luftrelaterade V0 beräknades ur machtal och
ljudhastighet. För att få flygplanets fart i x- och z-led gjordes
transformering över anfallsvinkeln ALFA i AG. För att få
flygplanets fart i y-led utnyttjades ur IME -hastigheten beräknad
y- accelertion och flygplanets sidtidskonstant.
För att
få de luftdatamätta farterna i LD i det mark- och norrefererade
koordinatsystemet gjordes transformering över attitydvinklarna från
FLI. Genom jämförelse mellan IME- och LD -mätta
hastighetsvektorerna V0/IME och V0/LD erhölls vindhastigheten W0 och
vindriktning.
|
|
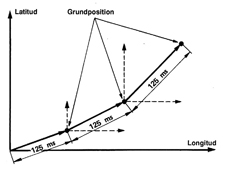
Princip uppdateringen av GP
Större
bild
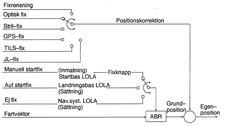
Princip beräkning och korrektionen av EP
Större
bild |
Ur Färdhastighetsvektorn (Fartvektorn) V0 beräknades flygplanets
position med utgångspunkt från startbasens koordinater i LOLA och
benämndes Grundposition GP. Uppdateringen av GP började vid rotationen
före lättning (noshjulet utfjädrat) och skedde genom integration av V0.
GP uppdaterades var 125:e millisekund ms. På grund av inverkan av olika
felkällor kom GP, som tidigare nämnts successivt avvika från verklig
position. För uppdatering av GP adderades en positonskorrektion till
flygplanets GP varvid den slutliga positionen kallad Egen Position EP
erhölls.
Positionskorrektionerna utfördes genom:
-
automatisk initial
FIX-tagning
-
positionsjämförelse
vid optisk FIX-tagning
-
genom (SD) STRIL-FIX.
-
FIX-tagning med
inmätning av TILS
-
genom
jaktlänk JL-FIX för att ensa två flygplans EP under ett företag
-
genom GPS-FIX
-
FIX-rensning
|
|
|
TN-systemets
IME mätte flygplanets accelerationer och läge relativt marken.
IME uppbyggnad och konstruktion vad gäller plattformsdelen beskrivs
i Flyglägespresentation JA37
under avsnittet
Uppbyggnad och Funktion.
Enhetens elektronikdel innehöll för navigeringssystemet del ett
minne för lagring av individegna kalibreringskonstanter, funktioner som
oberoende av den CD övervakade lodriktningen samt kretsar för
omvandling av analoga signaler till binära signaler och omvänt. För sin
normala funktion var IME helt beroende av beräkningarna som
utfördes av CD. Ävenså bestämdes i CD bland annat IME-
baserad acceleration, fart och GP. För attityd- och kursvinkelsignaler
fanns direkta utgångar från IME till FLI och KI.
Kraftdelen i IME utnyttjade i normala fall flygplanets
växelströmsförsörjning på 200/115V, 400Hz men vid kortare avbrott (> 500
m sek) på marken eller > 10 sek i luften tryggades försörjningen av +28
V via en DC / DC-omvandlare.
|
|
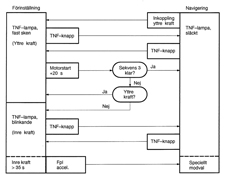
Modväxling i TN-systemet, princip
Större
bild.
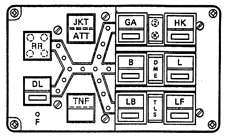
ST med TNF-knapp JA37C
Större
bild
TP med omkopplare och knappar till höger
Större
bild
|
TN-systemets navigeringsfunktion hade två funktionsmoder, en
Förinställningsmod och en Navigeringsmod. Vid förinställning
utgick TN-systemet från inmatad startbas.
Fanns
även en Back-Up-mod vid fel i CD.
Förinställningsmoden i sin tur var uppdelad i en Kort
förinställning vilken är beskriven i notis
Flyglägespresentation JA37
under avsnittet
Uppbyggnad och Funktion
och en Lång förinställning vilken inleddes av sekvens 4 varunder
plattformen uppvärmdes till drifttemperatur samt ställdes i vågläge.
Under sekvens 5 – 9 gjordes upprepade beräkningar av plattformens kurs
och lodläge samtidigt som den ställdes allt noggrannare i våg. Efter ca
12 min var den långa förinställningen klar och siffran 2 visades i
DAP vilken preliminärt indikerade att navigeringsfelet var maximalt
2 km fel efter en timmes flygning.
Navigeringsmoden erhölls när förinställningen avbröts eller
avslutades och innebar att IME lämnade information till
samarbetande utrustningar, vilka utgjordes av CD, SA, RR, FLI, KI,
SI, TI och MI.
Navigationsmod TN innebar att flygplanets position beräknades ur
IME-beräknade hastigheter och Navigeringsmod LD innebar att
positionen beräknades ur LD-beräknade hastigheter.
Modväxling mellan Förinställning och Navigering kunde ske på
olika sätt och framgår av principbilden. Växlingen med TFN-knappen
gjordes på ST vilken även hade en inbyggd lampa.
Funktionsövervakning FK av IME övervakades dels internt
och dels av CD vilket informerades till samarbetande utrustningar
och indikerade på Indikeringstablå lampfält TN.
Funktionskontroll FK av IME startades genom att
Testvredet på TP ställdes i läge AUTO eller TN och knappen FK
trycktes in varvid CD gjorde en utvärdering av IME
övervakningskretsar. Vid godkänd test tändes Grön lampa på TP,
annars Röd lampa.
I
de flygplan där GPS ingick användes det som stödsystem för
övriga navigeringssystem. Automatiska positions-FIXAR utfördes med hjälp
av beräknade differenser mellan EP och GPS-position. GPS-mottagarens
positionsdata gick till CD för beräkning och GPS
aktiverades i CD via inmatning i DAP i läge FPL DATA, se
nedan.
|
|
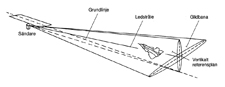
TILS placering vid landningsbanan samt sid- och
höjdtäckning.
Större
bilder.
|
TILS var ett system som även det arbetade på Ku-bandet (15,4 –
15,7 GHz). Det bestod av en markbaserad Sändare samt en flygplanburen
Mottagare. Sändaren sände med två antenner, en för en sidlob med
utbredningen 2 gr i sida och 20 gr i höjd och en för en höjdlob med
utbredning 40 gr i sida och 1,3 gr i höjd. Systemet definierade
elektroniskt en ledstråle i rymden och mottagaren mätte avvikelsen i
höjd och sida relativt ledstrålen. Systemet med Sändare och Mottagare
och i övrigt har beskrivits i notis
Navigeringssystem Flygplan AJ, SK37
under avsnittet Uppbyggnad och Funktion.
Mottagning kunde även här ske på upp till 20 kanaler vilka
inställdes enligt nedan;
Funktionsövervakning
i TILS mottagare gjordes på olika sätt så att den mottagna
informationen utvärderades korrekt. Godkänt resultat resulterade i att
signalerna SIDA OK och HÖJD OK matades till CD. Vid start av TILS
kontrollerade CD automatiskt mottagaren.
TILS sändare manövrerades från flygledningen. |
|
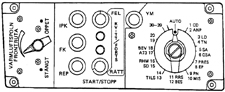
DAP (JA37D) med knappsats, DI och DKV. Läge DL/DAT saknas
i JA37C.
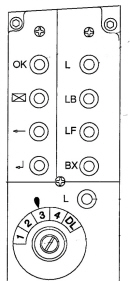
NP med Bpk i JA37D
NP med Bpk i JA37C
Lägesväxlingsschema DAP
Större
bild
|
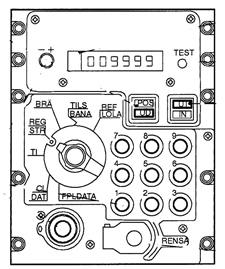
Manövrering och Presentation.
Inmatning och utmatning av uppdragsdata.
För in- och utmatning av uppdragsdata till systemet användes
DAP. Dess Datakategoriväljare DKV hade sju lägen med olika
funktioner för in- och ut- matning av alla aktuella data för beräkning
och presentation före och under ett flyguppdrag. Ävenså registrerades
eventuella felfunktioner av CD under flygningen vilka kunde
utläsas efter landning.
Panelen
var placerad till höger i kabinen.
Inmatningar föregicks av rensning i CD med knappen RENSA
på DAP. Vid inmatning av data valdes IN med IN/UT-omkopplaren.
DKV ställdes i önskat läge. Med tio siffertangenter inskrevs data vilka
visades på Dataindikatorn DI.
Därefter verkställdes inmatningen av att avsedd Brytpunktsknapp
Bpk (eller Bpk OK i JA37D) på NP trycktes in.
Panelen
var placerad till höger i kabinen.
Inmatning av uppdragsdata från systemet gjordes med POS/UD i
läge UD och IN/UT-omkopplaren i läge IN samt val med DKV av önskad
kategori enligt nedan;
-
REF LOLA –Longitud
och latitud inskrevs med sex siffror eller ett ref.nr för vissa
baser eller brytpunkter inlagda i CD-s minne. Bpk L.
-
TILS/BANA –
TILS-kanalnummer, banriktning och bashöjder till bas som saknade
ref.nr. Bpk L.
-
BRÄ – Extra
varningssignal bränsle. Bpk B4 (Bpk OK i JA37D).
-
TI – Kartpositioner
hanterade av CD såsom Luftvärn LV-områden,
Flygförarbrytpunkter och STRIL-s fasta lägen överlagrades på TI.
Bpk B4 (Bpk OK i JA37D).
-
CL/DAT– Tid och datum
(för GPS). TN autokalibrering (JA37D).
-
FPLDATA – Flygplanindividberoende parametrar inmatades av
markpersonal. Funktionsparametrar för presentation
(inriktningskorrektion i SI), ljustrim för paneler, kalibrering av
gasreglagets manöverarmsvinkel MAV, STRIL-adresser och
presentationer av imperiska enheter matas in här samt även
parametrar för radar, vapen, jaktlänk och motmedel.
Utmatning
av uppdragsdata från systemet gjordes med POS/UD i läge UD och
IN/UT-omkopplaren i läge UT samt val med DKV av önskad kategori för
bland annat kontroll av rätt inmatning enligt nedan;
-
REF/LOLA. - Utläsning
av data för landningsbaserna (L1 – LDL). Utläsning av uppdragsdata
knutna till brytpunkter och uppdrags-, återflygnings- och
områdespolygoner gjordes på TI.
-
TILS/BANA - visades
bara TILS-kanal om bana med TILS var vald.
-
BRÄ - Behövdes ingen
adress.
-
TI - Kontroll av
inmatade TI-punkter och intryckning av OK presenterades på TI
eller på dataindikatorn.
-
REG/STR –Registrering
Underhåll Funktioner RUF Snabbrapport efter uppdrag (endast
avläsning). Vissa uppdragsparametrar, bland annat STRIL
förbandsadress, val av övningsmod AKAN och IR-robot. Bpk B4 (Bpk OK
i JA37D).
-
CL/DAT utlästes tid
och datum med OK-knappen (JA37D).
-
FPLDATA - Kontroll av
icke geografiskt bundna data gjordes i önskad inknappad adress och
stegning med IN/UT-knappen.
Rimlighetskontroll.
Innan uppdraget började kunde en rimlighetskontroll av detta
göras. Detta innebar att med simulering ”ta sig runt” det inmatade
uppdraget och kontrollera navigeringsbenens längd och riktning.
Rimlighetskontrollen utfördes på i princip samma sätt som i
AJ37, se notis
Navigeringssystem Flygplan AJ, SK37, under
avsnittet Rimlighetskontroll,
dock
med någon avvikande knappologi och presentation. Förfarandet i detalj
beskrevs i Speciell Förarinstruktion SFI JA37 del 2, Handhavande vid
flygning (Hemlig) i avsnittet Datakontroll.
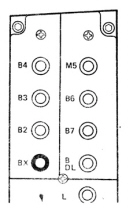
Brytpunktsnavigering.
Navigeringsmod
B (Brytpunkt) innebar i stort att presentationerna vid
rimlighetskontrollen blev detsamma under det efterföljande
flyguppdraget. Sålunda erhölls styrorder för navigering mot den
Brytpunkt Bp som utgjorde destination, B1- B7 (B1 – B48 i JA37D) som var
inmatade via DAP och vid övergång till moden inkopplades vald Bp
som destination. I CD fanns logik för att bestämma förvald Bp.
Kopplades moden in för första gången kontrollerar CD om det fanns
LOLA på Bp i en prioriteringsordning BDL (Bp datalänk från STRIL via
SD) – B1, B2 o s v. Om moden varit inkopplad tidigare erhölls den
senaste Bp som destination om inte BDL uppdaterats, då denna Bp valdes
som destination.
Manuell Bp-växling gjordes med knappen aktuell Bpk B1 – B7
(knappen B på TI i JA37D).
Automatisk destinationsväxling gjordes dels vid rotationen
(noshjulet fjädrade ut) före lättning, varvid första inmatade
brytpunkten B1 valdes som destination och dels när en Bp passerades,
dock måste det ske inom 3 km från destinationen. Vilken brytpunkt som
helst kunde också vid behov väljas manuellt, enligt ovan bland annat vid
passage utanför 3 km.
I de
fall där BDL var definierad valdes alltid denna vid övergång till Navigeringsmod B.
|
|
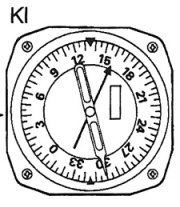
Presentationen på KI
Större
bild
|
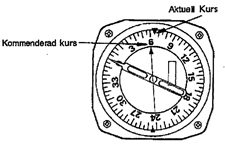
Kurs- och färdvinkelinformation.
På KI erhölls flygplanets kurs på kursskalan mot det fasta
indexet och bäring till destination (Kommenderad kurs) på smala visaren
mot kursskalan.
Indikatorn var placerad till höger uppe på instrumentpanelen. |
|
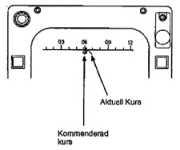
Presentationen på MI
Större
bild
|
På MI indikerades kurs av ett index mot kursskalan och
Kommenderad kurs angavs med rörlig (tvärrandig) symbol.
Indikatorn, i första hand en indikator för RR var placerad
centralt rakt fram i instrumentpanelen. |
|
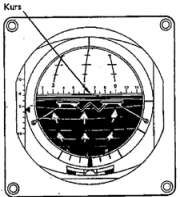
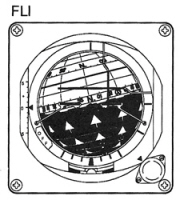
Presentationen på FLI
Större
bild
|
På FLI visades flygplanets kurs på kursskalan mot en fast
flygplansymbol.
Indikatorn var placerad till vänster vid sidan av MI på
instrumentpanelen. |
|
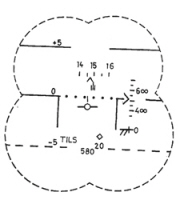
Presentationen på SI
Större
bild |
På SI visades Färdvinkelskalan 3 gr ovanför Fartvektorn VO
skalad 1:6,7. Färdvinkeln (flygplankursen) avlästes mot index under
skalan. Under skalan fanns index (tvärrandigt) för Kommenderad
färdvinkel. Ävenså visades avståndet till aktuell destination.
Indikatorn var placerad ovanför instrumentpanelen i flygförarens synfält
framåt. |
|
Presentation av de olika symbolerna på TI i JA37C)
Större
bild |
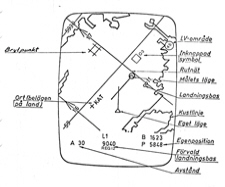
På TI visades en kartbild (ELKA) med Kustremsor och ett rutnät
med LOLA-grader samt ett relativt stort antal symboler, dels lagrade i
CD, dels inknappade via DAP och dels sända från STRIL via
SD. Kartan var centrerad till den egna flygplansymbolen, markerad
med en triangel samt en linje i färdriktningen. Linjens längd motsvarade
en minuts flygtid.
Utöver
dessa presenterades även eventuellt radarmål (från STRIL och/eller egen
radar) med flygkurslinje med längd som motsvarade 1 minuts flygtid, EP
i LOLA, förvald landningsbas samt avståndet till aktuell destination.
Indikatorn var placerad snett upp till höger i instrumentpanelen.
|
|

Presentationen på BMI |
På BMI visades aktuellt kvarvarande bränsle på den smala visaren
samt bränslebehovet på randiga breda visaren ”slipsen” till landning L1
från respektive Bp allt eftersom uppdraget förflöt.
Indikatorn var placerad till höger uppe på instrumentpanelen. |
|
|
Fixtagning.
Eftersom navigeringssystemet var behäftat med fel som kunde
växla med tiden måste GP övervakas vilket utfördes med FIX-tagningar.
Men använde då de i CD definierade brytpunkternas koordinater vid
beräkningen av korrektioner till grundpositionen.
FIX-tagning indelades på följande sätt;
-
Automatisk
FIX-tagning
-
Manuell FIX-tagning
-
Start-FIX
-
Optisk-FIX
-
STRIL-FIX
-
JL-FIX
-
FIX-rensning
Automatisk
FIX-tagning.
Automatisk FIX var av egenfixkaraktär och skedde helt
automatiskt. De bestod av Automatisk initial FIX (Start FIX),
GPS FIX och TILS FIX.
Automatisk initial FIX (Start FIX) verkställdes vid start eller
landning och åstadkoms, under förutsättning att vid sättning vid senaste
landningen avståndet till den landningsbas som utgjorde destination vid
start av navigeringssystemet ansågs vara mindre än 5 km sattes därvid
den aktuella landningsbasen som startbas och dess koordinater blev
utgångspunkt för GP vilken därmed uppdaterades.
GPS
FIX uppdaterade EP och tilläts om GPS-data var OK men endast under
flygning och ej under landningsfas 2 och 3.
TILS
FIX gjordes vid TILS- inflygning och skedde kontinuerligt under
landningsfas 3 (ej på lägre höjd än 50 meter) så länge flygplanets
mottagare befann sig inom det linjära området. Den
uppdaterade EG.
|
|
Knapp för initiering av FIX-tagningar monterad uppe till
vänster i kabin.
|
Manuell FIX skedde helt manuellt och bestod av Initial
FIX (Start FIX), Optisk FIX, STRIL FIX och FIX-rensning.
Initial FIX (Start FIX) verkställdes vid start eller landning och
åstadkom så att startposition och banriktning definierades för systemet
genom att knappen OPT FIX på styrspaken trycktes in på den av baserna i
L1 – L4 eller LDL (se landningsfaserna nedan) som utgjorde startbas och
dess koordinater blev utgångspunkt för GP vilka därmed uppdaterades.
Optisk FIX kunde verkställas när korrigering av navigeringssystemets
positionsuppfattning ansåg behövas vid överflygning av någon av de
inlästa Bp- erna. Den avsedda Bp valdes som destination och vid passage
av Bp trycktes knappen OPT FIX in varvid EG korrigerades.
STRIL FIX verkställdes på samma sätt som Optisk FIX ovan men mot en
av STRIL utlagd Bp (BDL).
JL
(Jaktlänk) FIX kunde utföras mellan olika flygplans
navigeringssystem som hade uppkopplat radiosamband och ingick i en
JL-grupp.
FIX-rensning har egenfixkaraktär och nollställde de korrektioner som
adderats till GP varvid denne och EG blir densamma. Funktionen
verkställs med RENSA på DAP.
|
|
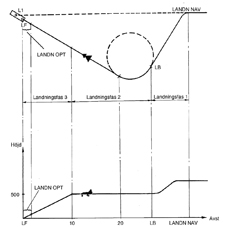
Landningsfaser och bangeometri.
Större bild. |
Landningsfunktion.
Allmänt
Landningsmod L (Landning) efter uppdraget inleddes genom
modväxling, automatiskt eller manuellt. Därmed blev förvald landningsbas
destination och styrkommandon erhölls mot den aktuella banans mittpunkt.
På
SI och FLI korsvisare visade kommandona för flygning mot en
landningsbrytpunkt LB. När denna passerades erhölls styrkommando in mot
grundlinjen och därefter längs glidbanan till sättning på
landningsbanan. Om TILS fanns aktiverad och flygplanets mottagare låst
på denna gavs styrkommando från TILS, dock inte förrän LB passerats.
Funktionen är i princip en direktlandning och indelas i tre
faser enligt nedan;
-
Landningsfas 1 –
börjar då LB valdes på NP. Bp blir då destination och kommenderad
höjd sätts då till 500 meter.
-
Landningsfas 2 –
börjar när LB passerats varvid LF blir destination eller valts
manuellt (kort inflygning) på NP
-
Landningsfas 3 –
börjar kommando för standardplané (avstånd 10 km till sättpunkten)
erhölls (förutsatte TILS)
|
|
FLI korsvisare frilagda.
KI med bankursen 30 grader presenterad.
|
Landningsfas 1
När LB
valdes på NP inkopplades funktionen för landningsnavigering in.
Härvid erhölls styrorder mot landningsbrytpunkt som svarade mot förvald
landningsbas och banriktning. Presentationen på SI var identisk
med vid navigering, se bild under Navigeringsmod B ovan. På FLI
lösgjordes korsvisaren och visade kurs- och höjdkommandon för
flygning mot LB. På TI visades avståndet och på KI
bäringen till landningsbrytpunkt LB. KI visade även
landningsbanans riktning. På TI lades en inflygningscirkel ut
till grundlinjen där det framgick om det blev höger- eller vänstersväng
in mot denne. Om landstället var utfällt gavs på TI en beräknad
ALFA-vinkel som gav optimal omdragsacceleration
(omdrag = nytt landningsförsök) vid fullgas (MS, Max
gas och Släckt EBK) på aktuell höjd. På SI gavs presentation för
hållning av en konstant flyghöjd till lägst 500 m fram mot LB samt även
presentation på Fartvektorns VO-s fena. Om den i programmet anbefallda
farten 550 km/h inte hölls indikerades vid för hög fart hög fena och vid
för låg fart låg fena. När landningsstället fälldes ut ändrades
fartreferensen till den fart som motsvarade ALFA = 12 grader eller 15,5
grader om denna ALFA-referens valts manuellt. Destinationen till LB hade
som mål 20 km från sättpunkten. |
|
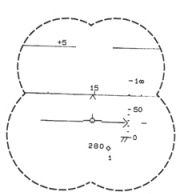
SI presentation fas 2
Större
bild |
Landningsfas 2
Fasen
inträdde automatiskt när LB passerades varvid styrkommando på FLI
och KI presenterades för sväng in mot grundlinjen och sättpunkten
LF blev destination.
SI
ändrar också presentation och visade ett programmerat svängkommando samt
höjdstolpar. Svängen hade radien 4,1 km vilket med farten 550 km/h gav
en bankningsvinkel på 30 grader. Flyghöjden sattes i programmet till 500
m vilket angavs i SI på Fartvektorn VO. Fanns tillgång till
TILS- information, (TILS låsning) indikerades detta med tänd lampa
TLS vid MI och text TILS i SI. Om då flygplanet befann sig
utanför linjär sidsignal gavs styrorder med 45 graders anflygningsvinkel
till TILS ledstråle i sida och vid passage till linjär signal gavs
styrorder på SI och FLI för en mjuk sväng in till denna
ledstrålen.
Växling till Landningsfas 3 uteblev om:
|
|
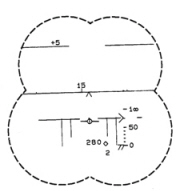
SI presentation fas 3
Större
bild
|
Landningsfas
3
Fasen inträdde automatiskt när flygplanet korsade glidbanan för
standardplané 2,86 grader, vilket inträffade vid den kommenderade
flyghöjden 500 m på avstånd 10 km från sättpunkten. Styrkommando
presenterades i SI och på FLI korsvisare att följa den med
avståndsinformation från TILS och med presentation av avståndet på
TI. På SI presenterades glidbana med riktpricken 2,86 grader
under konsthorisonten och avvikelsen från glidbanan presenterades av
höjdstolpbanan i förhållande till glidbanan. I slutet av fas 3 släcktes
TILS- indikeringen i SI och ersattes med
avståndsindikering digitalt. Under fasen uppdaterades EP automatiskt med
så kallad TILS-FIX men upphör under 50 meters flyghöjd.
|
|
SI presentation Optisk landningsmod.
Större
bild

Styrspak med OPT–knapp.
|
Optisk Landningsmod inkopplades automatiskt när aktuell flyghöjd
under slutfasen understeg 35 m och radarmätt höjd var mindre än 15 m. Då
växlade SI presentation och indikerade att stolpbanan försvann
och samtidigt korrigerades banvinkeln så att glidbanan utgjordes av en
sjunkhastighet av 2,96 m/sek.
Optisk Landningsmod kunde även inkopplas manuellt med att trycka in
OPT- knappen på styrspaken Glidbanan presenterades då på SI och
FLI med förhållandet 1:20 (höjd:avstånd, 2, 86 grader till
sättpunkten) i landningsbanans riktning. TILS- information användes inte
för styrorderberäkning i denna mod varför TILS- indikeringen
släcktes vid MI och på SI och Korsvisarna i FLI
parkerades
TN-systemet hade ett reservsystem AHRS (Attitude Heading
Reference System) som aktiverades vid TN-fel. Vid AHRS aktiverat
presenterade flygläget i SI med en Horisont med Banvinkelskala,
Reservfartvektor, Reservkurs, TILS-information som normalt samt texten ”AHRS”.
FLI felvarnar. AHRS använde information från SA
vinkelhastigheter i roll och tipp och SA omräknar dem till roll-
och tippvinklar som vid bortfall av IME (TN) och med stöttning
från LD av fart, höjd, anfallsvinkel samt kurs från RK för
att beräkna flygläget.
AHRS
kopplades automatiskt in, SA attitydfunktioner kopplades ur och
medförde relativt bekväm hemflygning till bas. |
|

Dimensionerande fall för beräkning av bränsletilläggför
inflygning för landning.
Större
bild. |
Bränsleberäkning.
Under uppdraget erhölls information om bränslesituationen på den
i CD planerade flygningen. Bränsleuppföljningen syftade
till att ange bränslebehovet för återstående delen av uppdraget
inklusive tillägg för landningsproceduren (tillägget varierad beroende
på vald mod, L, LB ,LF) och minimibränsle vid sättning (10%).
Beräkningarna av ovannämnda funktioner utfördes av CD och
aktuell bränslemängd och beräknat behov (”slipsen”) presenterades på
BMI.
Beräkningen utgick ifrån planerat uppdrag samt aktuell vind och
yttre last. Efter start beräknades behovet fortlöpande. Beräkningen på
den aktuella delsträckan gjordes med planerad fart och aktuell höjd fram
till destination för aktuell delsträcka Därifrån ingick behovet i
enlighet med uppdragsplaneringen för resterande del av uppdraget fram
till landning. |
|
BMI visar aktuellt bränsle samt behovet för uppdraget på
”slipsen”. |
Beräkning av presentation av bränslebehovet i olika
navigeringsmoder Mod;
-
Mod B – ”Slipsen”
enligt planering för återstående del av uppdraget fram till
landning.
-
Mod L - ”Slipsen”
från aktuell position till landning med distansekonomisk fart på
aktuell höjd.
-
Mod LB - ”Slipsen”
för distansekonomisk fart på aktuell höjd. Tillägg för flygning LB
till LF (4%) utöver minimibehovet vid sättning (10%).
-
Mod LF - ”Slipsen”
för distansekonomisk fart på aktuell höjd. Inget tillägg utöver
minimibehovet vid sättning (10%).
|
|
Lampa BRÄMÄNGD på en del av ITF
|
BRÄMÄNGD-varning
(första och andra) för min bränsle indikerades som BRÄMÄNGD
(lampa) på en ITF (varningstablå) och akustisk huvudvarning i
hörtelefon. Den gavs då bränslebehovet ”slipsen” (med respektive utan
inmatad bränslereserv) var lika som kvarvarande bränslemängd. Varningen
beräknades från aktuell position till förvald landningsbas, inklusive
behovet till alternativ bas.
ITF var
monterad till höger i kabin.
Skrivet
av Göran Hawée
Senast
uppdaterad 2020-09-04
Källor:
Beskrivning JA37, del 1.
|