|
|
 |
| |
Navigeringssystem Flygplan AJ, SK37
AJ37A, SK37, AJ37SF, AJ37SH Navigering
|
|

AJ37 med
robotbeväpning
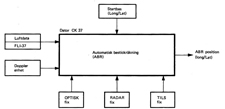
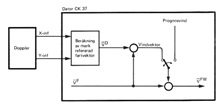
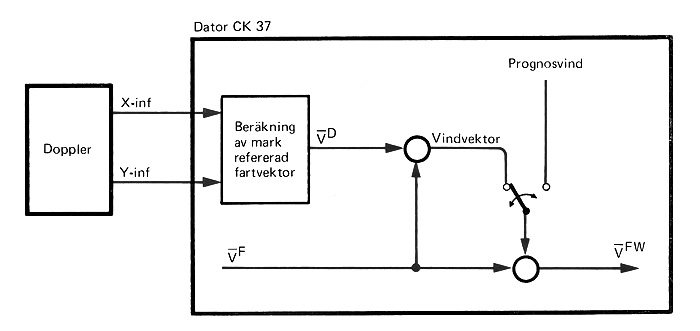
Principblockschema navigeringsfunktionen.
Större bild
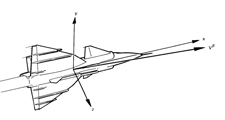
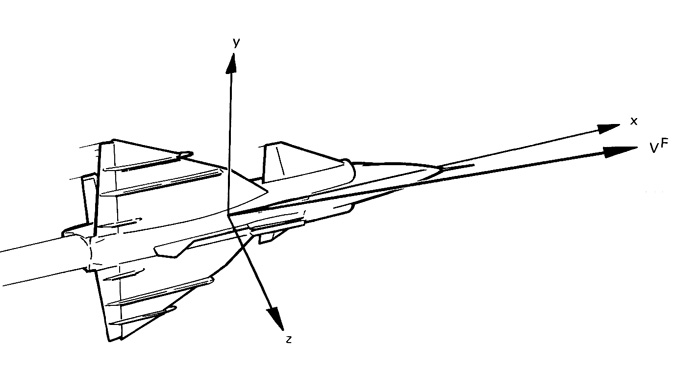
Fartvektor, princip
Större bild
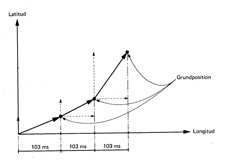
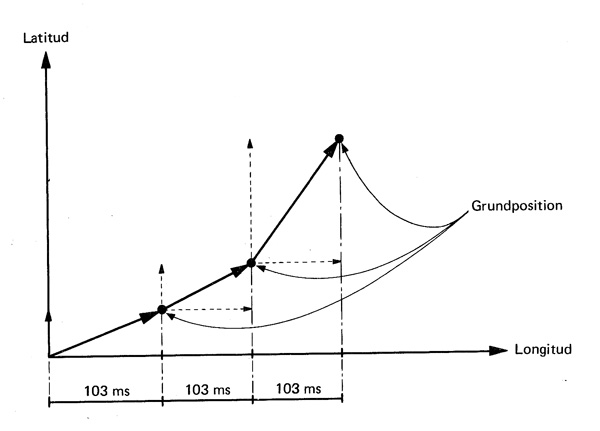
Princip uppdateringen av GP
Större bild
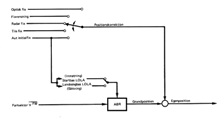
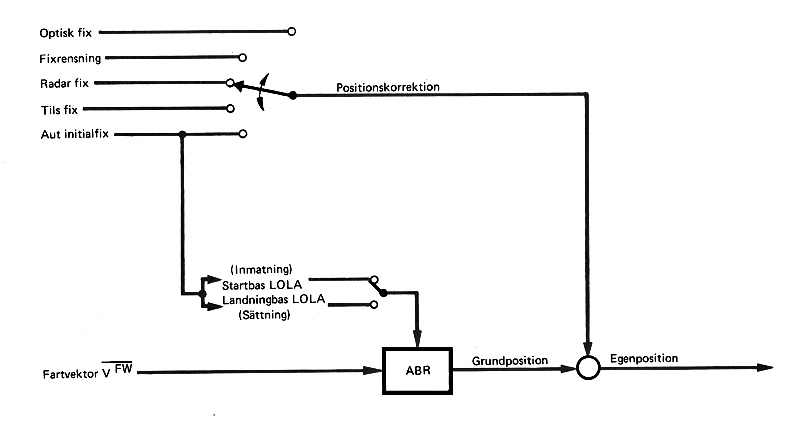
Princip beräkning och korrektionen av EP
Större bild |
Allmänt
Till flygplan
AJ37
och SK37
kom att
utvecklas och installeras ett navigeringssystem där flygplanets dator
Centralkalkylator CK-37
var huvudenhet för sammanställningar av olika primärdatagivare samt
beräknade de parametrar som var av betydelse för ett navigeringssystem
som kunde medverka till att flygplanet kunde flyga i alla väder och
mörker med hjälp av inmatade färddata på marken och i luften.
Försvarets Materielverks Flygplanbyrå FMV-F tillsammans med
Flygvapenchefen CFV-s Flygavdelning utverkade en specifikation på
funktioner och uppdraget att utveckla systemet gick till Svenska
Aeroplan Aktiebolaget SAAB.
Datagivare för systemet var bland annat ett
Dopplersystem 002,
Luftdatasystem LD-4,
Accelerometrar i Styrautomat
SA-06,
Flyglägesinstrument FLI-37,
Taktiskt Landningsystem TILS
och Radar
PS-37. Utdata
presenterades bland annat på Elektroniska Presentationssystemet
EP-8.
I
navigeringssystemet ingick följande enheter;
-
Centralkalkylator CK-37
-
Dopplerenhet DE 002
-
Luftdataenhet LD-4
-
Taktiskt Landningssystem TILS
-
Temperaturgivare TG
-
Accelerometerenhet ACC
-
Anfallsvinkelgivare AG
-
Styrautomat SA-06
-
Radarpanel RP PS-37
-
FLI-37 Flyglägesindikator
FLI
-
Navigeringspanel NP
-
Datapanel DAP
-
EP-8 Siktlinjeindikator SI
-
EP-8 Centralindikator CI
-
Avståndsindikator AI
-
Bränslemängdindikator BMI
-
Destinationsindikator DI
Uppbyggnad och Funktion
Navigeringssystemet var uppbyggt så att det betjänades av
flertalet, dels fristående system med egna presenterande funktioner och
dels av system enbart för navigeringsfunktionen. Dessa lämnade data till
CK för att denne skulle kunna utföra navigerings- och
bränsleberäkningar för flyguppdrag.
Navigeringsprocessen baserade sig på så kallad automatisk
bestickräkning ABR vilket i huvudsak innebar att flygplanets dator CK
med kännedom om startbas, fart och kurs kontinuerligt beräknade
flygplanets position i longitud och latitud, LOLA. Informationen om
dessa erhöll CK från LD och FLI. För att ABR skulle
bli meningsfulla måste hänsyn även tas till rådande vind vilken erhölls
från DE eller från inmatad prognosvind om DE var ur
funktion.
På grund av systemofullkomligheter kom den beräknade positionen
under flygning att avvika från flygplanets verkliga position. Felet
korrigerades genom så kallade FIX-tagningar, vilket utfördes så att man
från radarn via RP eller TILS eller på optisk väg
tillförde en korrektion så att systemets uppfattning om positionen åter
överensstämde den verkliga.
Navigeringsberäkningen krävde, för att CK skulle kunna
utföra ABR, att flygplanets Fartvektor VF beräknades vilken utgjordes av
resultatet av flygplanets hastighet i x-, y- och z-led.
Hastigheten i x-och z-led åstadkoms med att ljudhastigheten VA
beräknas med data från LD och TG och med machtalet från
LD beräknas verklig fart VM som multiplicering med Sin för ALFA från
AG. Dessa filtrerades med uppmätt acceleration i x- och z-led
från ACC varvid x- och y-komposanter erhölls. Y-komposanten
beräknades ur Y-accelerationen från SA. För referens till marken
transformerades komposanterna över flygplanets attitydvinklar från
FLI. Med vindkomposanterna från DE eller inläst prognosvind
från DAP erhölls den slutgiltiga markrefererade Fartvektorn VFW
som användes för ABR.
Ur Fartvektorn VFW beräknades flygplanets position med
utgångspunkt från startbasens kordinater i LOLA och benämndes
Grundposition GP. Uppdateringen av GP började vid rotationen före
lättning (noshjulet utfjädrat) och skedde genom integration av
Fartvektorns VFW x- och y-komposanterna var 103:e millisekund. På grund
av inverkan av olika felkällor kom GP, som tidigare nämnts successivt
avvika från verklig position. För uppdatering av positionen adderades en
korrektion till GP varvid den slutliga positionen kallad Egen Position
EP erhölls. |
|
Princip beräkning av dopplerinformation i
CK
Större bild
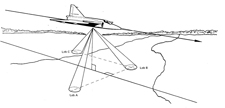
Dopplerns
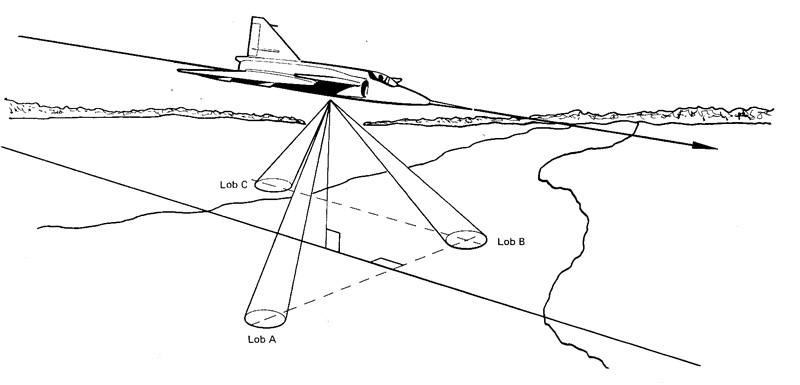
antennlobkonfiguration.
Större bild
Större bild
Större bild.
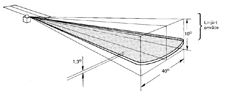
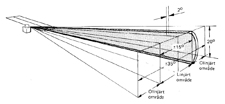
TILS placering vid landningsbanan samt
sid- och höjdtäckning.
|
Positionskorrektionerna utfördes på följande sätt genom:
-
positionsjämförelse vid optisk FIX-tagning
-
positionsjämförelse vid FIX-tagning från radar
-
FIX-tagning med inmätning av TILS
-
automatisk initial FIX-tagning
-
FIX-rensning
Dopplerutrustningen mätte flygplanets hastighet relativt
markytan längs dess x- och y-axel inom hastighetsområdet 25-500 m/sek i
x-led och +- 100 m/s i y-led. Den ur DE markrefererad Fartvektor
VD jämfördes med VF i CK och resulterade, som tidigare nämnts i
Fartvektorn VFW.
DE bestod av en CW-radar (Continuous wave) på Ku-bandet med
våglängden 2 cm och var placerad på undersidan av höger vinge. Tre
sändar- och mottagarantenner var monterade varav två var riktade framåt
snett nedåt och en bakåt snett nedåt.
I
funktionen ingick att sändaren sände ut signal i sina tre
antenner och reflektionerna från marken togs emot i mottagarantennerna.
Efter blandning med sändarfrekvensen erhölls en dopplerfrekvens från
respektive mottagare. Signalerna utvärderades i en frekvensföljare som
sökte upp och följde frekvensen med största amplituden och efter
jämförelse matades skillnaderna till CK som mått flygplanet fart
i x- och y-led.
Dopplerns tre funktionsmoder:
-
Sökmod, Tillslag och söker frekvens att följa på
-
Följemod, Systemet följer på dopplersignal
-
Minnesmod, Är 2,5 sek, startar vid signalbortfall.
DE
Funktionsövervakning FK indikerade på Indikeringstablå lampfält
NAV SYST och huvudvarning från CK 2 min efter upplåsning.
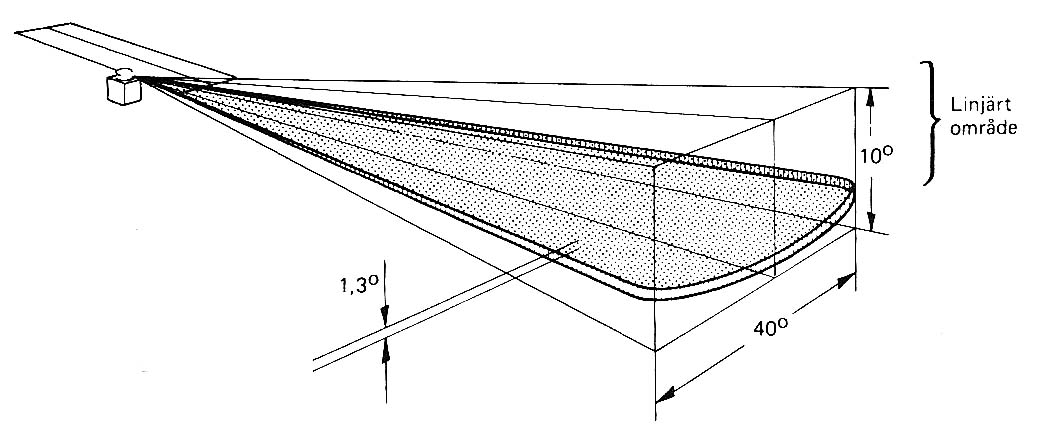
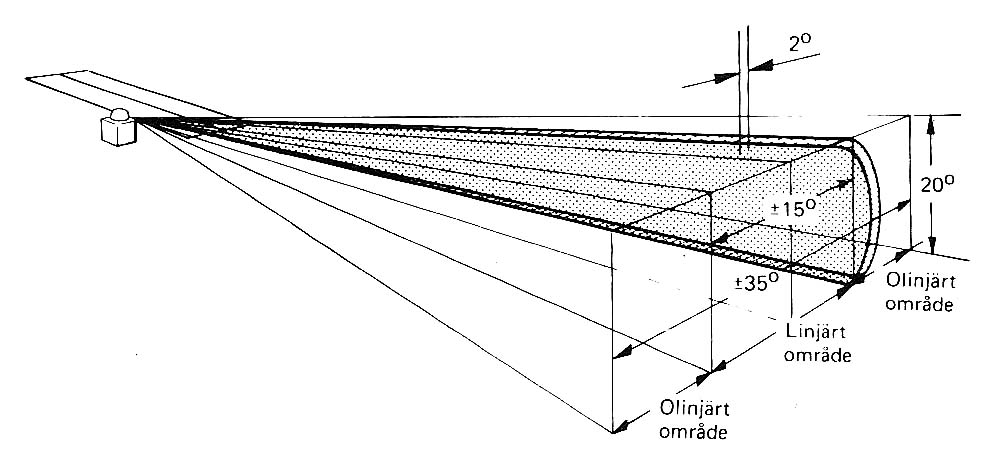
TILS var ett system som även det arbetade på Ku-bandet. Det
bestod av en markbaserad Sändare samt en flygplanburen Mottagare.
Sändaren sände med två antenner, en för en sidlob med utbredningen 2 gr
i sida och 20 gr i höjd och en för en höjdlob med utbredning 40 gr i
sida och 1,3 gr i höjd. Systemet definierade elektroniskt en ledstråle i
rymden och mottagaren mätte avvikelsen i höjd och sida relativt
ledstrålen.
Sändaren var placerad vid landningsbanans sättpunkten (ca 100 m
in på banan) och ca 50 m från banans mittlinje och riktad så att
ledstrålen i sida avvek 3 gr från grundlinjen och korsade denne ca 900 m
framför sättpunkten. Vinkelinformationerna var pulskodade och
proportionella mot flygplanets vinkelavvikelse. Utanför sektorn (+- 40
gr) i sidkanalen var avvikelsen olinjär. I höjd var informationen endast
proportionell.
Vid
nederbörd (regn) begränsades räckvidden till 25 km, i klart väder till
100 Km.
Den pulskodade informationen bestod av pulspar som gav olika
informationer;
För
varje grad som antennerna vred sig i förhållande till sina
referensriktningar ändrades tidsavståndet 2 mikrosekunder mellan
pulsparen. I sida varierade tidsavståndet motsvarande 0 – 15 gr och i
höjd 0 – 10 gr. Höjd- och sidinformationen identifierades med att tiden
mellan pulsparen varierades.
Mottagaren uppgift var att ur de mottagna signalerna utvärdera
och mata informationen till CK om flygplanets vinkelavvikelse
relativt ledstrålen. Efter detektering avkodades pulserna och påfördes
en integrator vars spänningsläge representerade både sida och
höjdinformation. Denna påfördes med hjälp av logiksignaler två
hållkretsar, en för sida och en för höjd. Utspänningarna för dessa
benämndes TILS SIDA och TILS HÖJD och var proportionella mot avvikelsen
från ledstrålen och glidbanan upp till ±6
gr i sida och ±2,5 gr i höjd
varefter de blev konstanta. De matades till CK för beräkning av
styrorder. Mottagning kunde ske på upp till 20 kanaler vilka inställdes
enligt nedan;
TILS sändare
manövrerades från flygledningen. |
|
DAP med knappsats, dataindikator och
kategoriväljare till höger i kabinen.
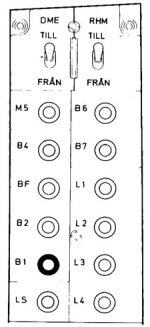
NP med brytpunktsknappar
Bpk till höger i
kabinen

FIX-omkopplaren på radarhandkontrollen
nere till vänster i kabinen
DI till höger på instrumentbrädan visar
att Brytpunkt B1 valts som destination.
AI under DI med
avståndsvisare och fönster för mil eller km

Kursindikatorn CIk
med index visande bäring till destination

BMI under AI visar aktuell bränslemängd
och behovet på ”slipsen”. |
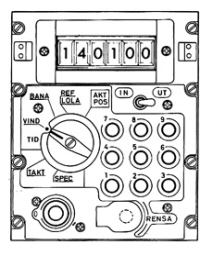
Manövrering och Presentation.
Inmatning
och utmatning av uppdragsdata.
För in- och utmatning av uppdragsdata till systemet användes
DAP. Dess Datakategoriväljare DKV hade sju lägen med olika
funktioner för in- och utmatning av alla aktuella data för beräkning och
presentation före och under ett flyguppdrag. Även så registrerades
eventuella felfunktioner av CK under flygningen vilka kunde
utläsas efter landning.
Inmatningar föregicks av rensning i CK med knappen RENSA.
Vid inmatning av data valdes IN med IN/UT-omkopplaren. DKV ställdes i
önskat läge. Med tio siffertangenter inskrevs data vilka visades på
dataindikatorn. Därefter verkställdes inmatningen av att avsedd
Brytpunktsknapp Bpk på NP trycktes in.
-
REF
LOLA –Longitud och latitud inskrievs med sex siffror eller ett ref
nr för vissa baser eller brytpunkter inlagda i CK-s minne.
Bpk B1-B7
-
BANA – Banriktning inmatades för bas som ej hade ref nr. Bpk L1-L4.
-
VIND – Vindrikning och vindstyrka inmatades. Utgjorde reserv om
dopplermätning inte fungerade. Valfri Bpk.
-
TID
– Aktuell tid inmatades. Bpk LS. Planerad anfallstidpunkt inmatades.
Bpk M5 (mål)
-
TAKT – Val av IR-robot (RB24B eller 24J)
-
SPEC – Utläsning av lasträknare och CK-felindikeringar.
(Användes av markpersonal)
-
AKT
POS – Utmatning av aktuell position.
Utmatning
av uppdragsdata från systemet gjordes med IN/UT-omkopplaren i
läge UT samt val med DKV av önskad kategori för bland annat kontroll av
rätt inmatning.
Den alfanumeriska beteckningen för den brytpunkt som utgjorde
destinationen presenterades på DI och angavs i två sifferfönster.
Dess drivelektronik var placerad i DAP. Under flygning eller på
marken registrerades värden och felfunktioner i systemet.
Rimlighetskontroll.
Innan uppdraget började rekommenderades att en
rimlighetskontroll av detta gjordes. Detta innebar att med simulering
”ta sig runt” det inmatade uppdraget och kontrollera navigeringsbenens
längd och riktning.
Rimlighetskontrollen utfördes på följande sätt;
Med
dataväljaren i AKT POS och IN/UT i UT trycktes Bpk LS in varvid
FIX-tagning till LS gjordes med FIX-omkopplaren på radarhandkontrollen i
läge TV (bottenläge). Utgångsläget var nu LS (startbasen) och när
destinationsväxling gjordes med Bpk till B1, visades B1 på DI och
avståndet mellan LS och första brytpunkten B1 på AI Denne hade
två områden, 40 mil och 40 km vilket omkopplades automatiskt och
indikerades i ett fönster på AI. Kursindexet på CI
Kursindikator, CIk visade bäring till B1. På BMI visades
på den speciella randiga visaren, ”slipsen” beräknad bränsleåtgång för
uppdraget från start till landning (LS – L1).
Kontroll av nästa delsträcka utfördes på motsvarande sätt genom
FIX-tagning på B1 och destinationsväxling till B2 med Bpk. Avståndet
mellan B1 och B2 visades på AI och bäringen mellan B1 och B2 på
indexet på CIk. På BMI presenterade bränslebehovet på
”slipsen” för återstående delen av uppdraget (B1-L1).
Anm.
Genom att jämföra bränslebehovet mellan B1 - L1 med behovet från
FIX-tagningen LS - L1 erhölls beräknad åtgång för delsträckan LS - B1.
På detta sätt kontrollerades uppdraget mot de planerade
navigeringsberäkningarna. Kontrollen avslutades med FIX-tagning på LS
eller med DKV i läge TID varvid LS-kordinaterna automatiskt sattes som
EP. |
|
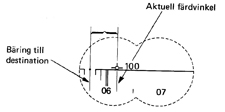
SI visar på
Fartvektorn VFW bäringsavvikelsen till destination
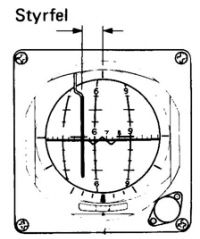
FLI sidvisare visar ”styrfelet”
mellan aktuell kurs och bäring till
destination.
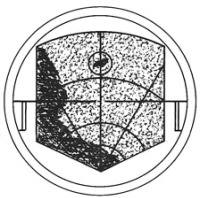
CI med presentation av destinationseko och
cirkelmarkör.
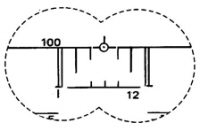
SI med tänd tidslinje.
|
Brytpunktsnavigering.
Brytpunktsnavigeringen vid flygning innebar i stort att
presentationerna vid rimlighetskontrollen blev detsamma under det
efterföljande flyguppdraget. Sålunda om LS utgjorde destination vid
start, växlades vid rotationen (noshjulet fjädrade ut) före tältning,
första inmatade brytpunkten B1 automatiskt fram som destination.
Därefter framväxlades brytpunkterna automatiskt när en brytpunkt
passerades, dock måste det ske inom 3 km från destinationen, till nästa
brytpunkt som då blev destination. Vilken brytpunkt som helst kunde
också vid behov väljas manuellt bland annat vid passage utanför 3 km.
Under navigeringen tillkom presentationer, förutom de som
visades vid rimlighetskontrollen även;
Kursavvikelsen
till destination kunde, förutom på CIk även avläsas på
färdvinkelpresentationen av Fartvektorn VFW på SI. Den avvek i
grader från bäringen till destinationen och begränsades till maximalt
8,5 grader samt kunde missvisas på grund av vindavdrift. Även FLI
korsvisarens sidvisare presenterade avvikelsen mellan aktuell- och
kommenderad kurs.
Aktuellt kvarvarande bränsle samt bränslebehovet till landning
L1 från respektive brytpunkt B1 - B4 eller M5 presenterades allteftersom
uppdraget förflöt på BMI.
Avståndspresentationen var, förutom den på AI
kompletterad med ett avstånd presenterat på CI. Där kunde
destinationen och en cirkelmarkör presenteras inom CI mätområde
men avståndsinformationen var inte så noggrann.
På
SI presenterades även en tidlinje med mittindex som angav beräknad
flygtid till destination. Den tänds vid 60 sek kvar och minska i längd
proportionellt med tiden kvar till destination. Vid destination till M5
och om åtgärd skall göras tänds den vid 40 sek var. |
| |
Fixtagning.
Eftersom navigeringssystemet var behäftat med fel som kunde
växla med tiden måste GP övervakas vilket utfördes med FIX-tagningar.
Men använde då de i CK definierade brytpunkternas koordinater vid
beräkningen av korrektioner till grundpositionen. FIX-tagning gjordes
även för uppdatering om målets position i systemet. All FIX-tagning
verkställdes med FIX-omkopplaren på radarhandkontrollen i läge TV
(bottenläge).
FIX-tagning indelades i följande typer.
Manuell
FIX var antingen Egen FIX eller Mål FIX. Den sistnämnda utfördes när
mål, M5 var destination och den förstnämnda när destinationen var vilken
annan brytpunkt som helst.
Egen
FIX utfördes som Optisk FIX eller som Radar FIX.
Optisk FIX gjordes med flygning över en utvald känd fixpunkt eller
brytpunkt och vid passagen aktiveras FIX-tagningen.
Radar FIX utfördes så att en video- och cirkelmarkör styrdes med
radarhandkontrollen så de sammanföll med radarekot från
destinationspunkten, fixpunkten där FIX-tagningen verkställdes.
Mål
FIX bestod av Optisk mål FIX vilken förutsatte att
målet var destinationen och att det var synligt eller Radarmål FIX
som förutsatte att målet var destination.
Optisk mål FIX utfördes så att flygningen gjordes över målet varvid
FIX-tagningen verkställdes vid passagen.
Radarmål FIX gjordes på samma sätt som vid Radar FIX
men att korrektionen utgjordes av sträckan markörerna flyttades från det
presenterade läget till radarekot.
Automatisk FIX var av egenfixkaraktär och skedde helt automatiskt.
De bestod av Automatisk initial FIX och TILS FIX.
Automatisk initial FIX verkställdes vid start eller landning och
åstadkom så att dess kordinater blev utgångspunkt för grundpositionen
vilka därmed uppdaterades.
TILS
FIX gjordes vid TILS-inflygning och skedde kontinuerligt så länge
flygplanets mottagare befann sig inom det linjära området och
uppdaterade dess EG.
FIX-rensning har egenfixkaraktär och nollställde de korrektioner som
adderats till GP varvid denne och EG blir densamma. Funktionen
verkställs med RENSA på DAP. |
|
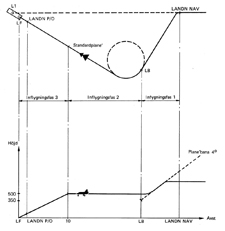
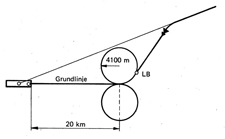
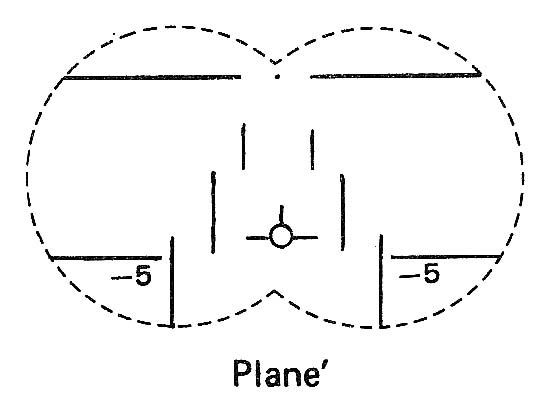
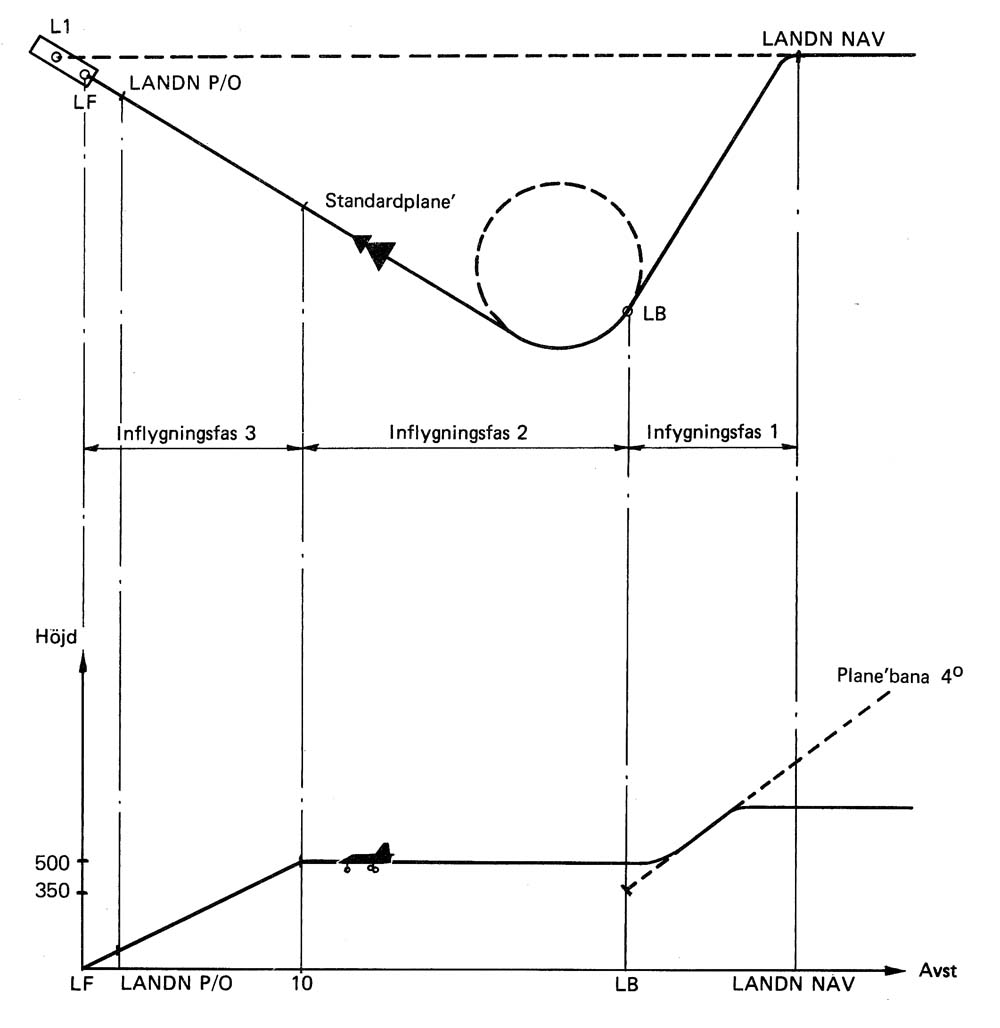
Inflygningsfaser och bangeometri.
Större bild.
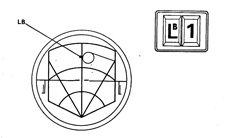
CI presenterar destination mot LB1
Större bild
Större bild
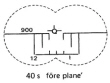
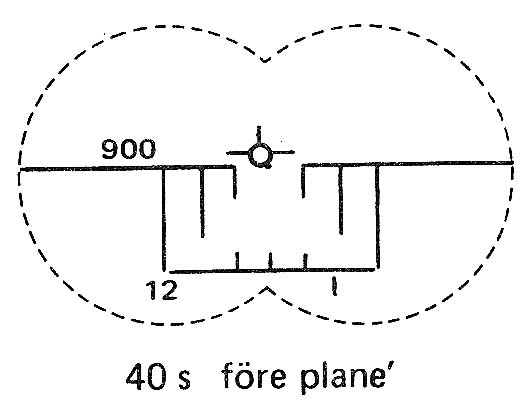
SI presentation före och efter
Plané-kommando.
Inflygningscirkeln från LB.
Större bild. |
Landningsnavigering
När destinationen under uppdraget utgjordes av Landningsbas L1
och läge NAV valdes på skedesväljaren inkopplades funktionen för
landningsnavigering. På SI och FLI korsvisare erhölls
kommandon för flygning mot en landningsbrytpunkt LB. När denne
passerades erhölls styrkommando in mot grundlinjen och därefter längs
glidbanan till sättning på landningsbanan. Om TILS fanns aktiverad och
flygplanets mottagare låst på denna gavs styrkommando från TILS, dock
inte förrän LB passerats. Funktionen är i princip en direktlandning och
indelas i tre faser enligt nedan;
-
Inflygningsfas 1 – börjar med skedesväljaren i läge LANDNING NAV.
-
Inflygningsfas 2 – börjar när LB passerats.
-
Inflygningsfas 3 – börjar vid standardplané (avstånd 10 km till
sättpunkten).
Anflygning
skede nav.
När
landningbas L1 blev destination, automatiskt eller med manuellt val på
NP började inflygningsförloppet. L1 visades på DI.
Styrinformation erhölls till landningsbasens mittpunkt på SI och
FLI korsvisare samt på CIk som tidigare.
Inflygningsfas 1
När
läge LANDNING NAV valdes på skedesomkopplaren inkopplades funktionen för
landningsnavigering. Härvid erhölls på CIk och på FLI
korsvisare kurs- och höjdkommandon för flygning mot, samt visade AI
avståndet till landningsbrytpunkt LB. DI visade LB1 och CI
visade avstånd och riktning mot LB samt svängriktning. På SI gavs
presentation för hållning av en konstant flyghöjd till lägst 500 m fram
mot LB.
Vid 40
sek före Plané-kommando tändes tidslinjen i SI och då flygplanet
korsade planébanan på 4 grader gavs styrkommando i SI om att
följa den. I SI angavs även presentation på Fartvektorns VFW-s
fena. Om den i programmet anbefallda farten 550 km/h inte hölls
indikerades vid för hög fart hög fena och vid för låg fart låg fena. När
landningsstället fälldes ut ändrades fartreferensen till den fart som
motsvarade ALFA = 12 grader eller 15,5 grader om denna ALFA-referens
valts manuellt.
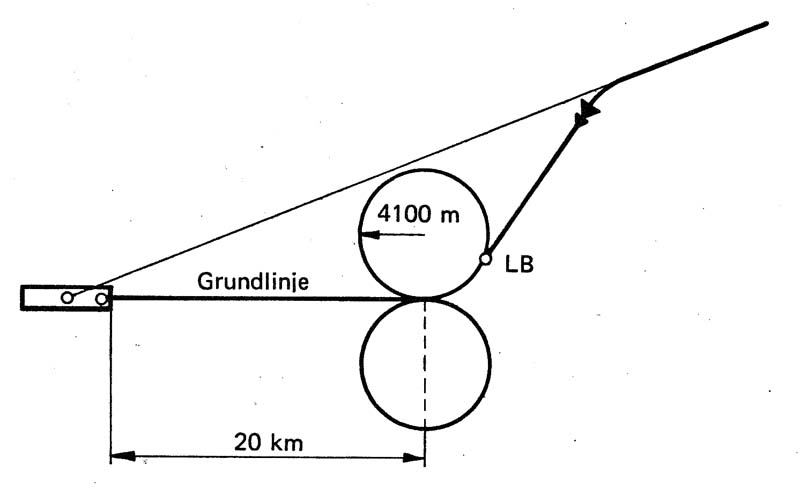
Destinationen till LB hade som mål 20 km från sättpunkten.
Inflygningsfas 2
Fasen
inträdde automatiskt när LB passerades varvid styrkommando på Clk
och FLI presenterades för sväng in mot grundlinjen och
sättpunkten LF blev destination. På DI visades LF1. SI
ändrar presentation och visade ett programmerat svängkommando. Svängen
hade radien 4,1 km vilket med farten 550 km/h gav en bankningsvinkel på
30 grader. På CI ändrades presentationen varvid
cirkelmarkörens centrum angav landningsbasens läge. Flyghöjden sattes i
programmet till 500 m vilket angavs i SI på Fartvektorn VFW.
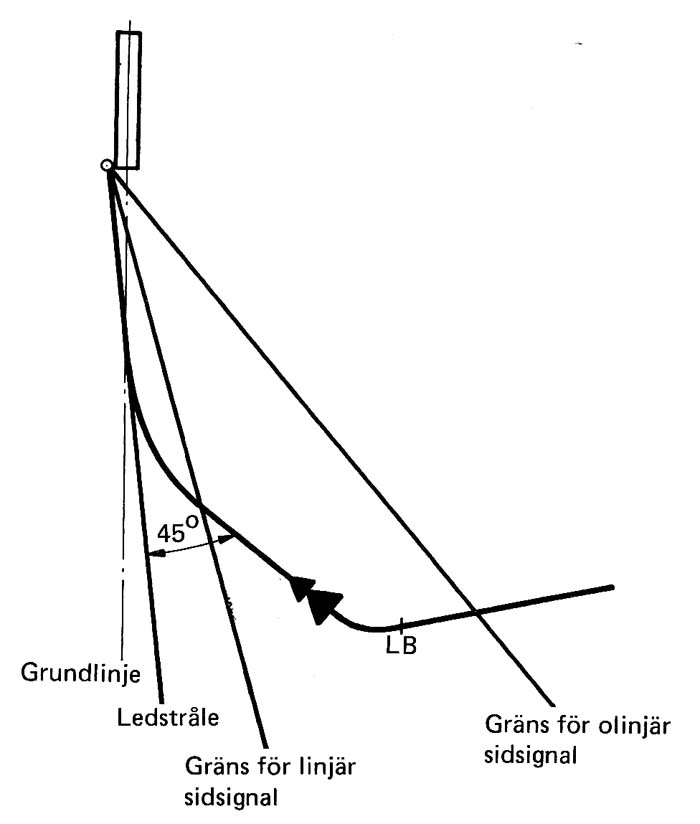
Fanns tillgång till TILS-information (TILS låsning) efter växling vid LB
ändrades svängkommandot till konstant svänghastighet = 2,2 grader / sek.
Om flygplanet befann sig utanför linjär sidsignal gavs styrorder med 45
graders anflygningsvinkel till TILS ledstråle i sida och vid passage
till linjär signal gavs styrorder på SI och FLI för en
mjuk sväng in till denna ledstrålen.
Vid 40
sek före Plané-kommando för planerat inträde i Inflygningsfas 3 tändes
tidslinjen i SI.
|
|
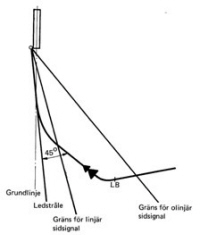
Inflygning med
TILS-information
Större bild
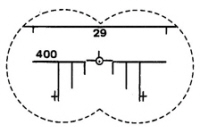
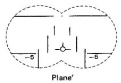
SI presentation i Inflygningsfas 3 med
riktprick, banvinkelsymbol och stolpbanan.
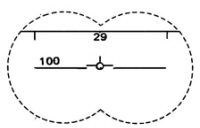
SI presentation i Optisk landningsmod med
riktprick och banvinkelsymbol |
Växling till Inflygningsfas 3 uteblev om:
Inflygningsfas 3
Fasen
inträdde automatiskt när flygplanet korsade glidbanan för standardplané
2,86 grader, vilket inträffade vid den kommenderade flyghöjden 500 m på
avstånd 10 km från sättpunkten. Styrkommando presenterades i SI
och på FLI korsvisare att följa den med avståndsinformation från
TILS och med presentation av avståndet på AI. På SI
presenterades glidbana med riktpricken 2,86 grader under konsthorisonten
och avvikelsen från glidbanan presenterades av stolpbanan i förhållande
till glidbanan. Under fasen uppdaterades EP automatiskt med så kallad
TILS-FIX. När aktuell flyghöjd under slutfasen understeg 30 m på 600 m
avstånd till sättpunkten växlade SI presentation till Optisk
Landningsmod. Detta indikerades i SI av att stolpbanan
försvann och samtidigt korrigerades banvinkeln så att glidbanan
utgjordes av en sjunkhastighet av 2,96 m / sek.
Optisk Landningsmod kunde även inkopplas manuellt med att ställa
Skedesväljaren i läge LANDNING P/O. Glidbanan presenterades då på SI
och FLI med förhållandet 1:20 (höjd:avstånd till
sättpunkten) i landningsbanans riktning. |
|
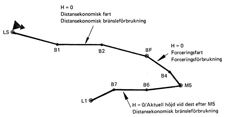
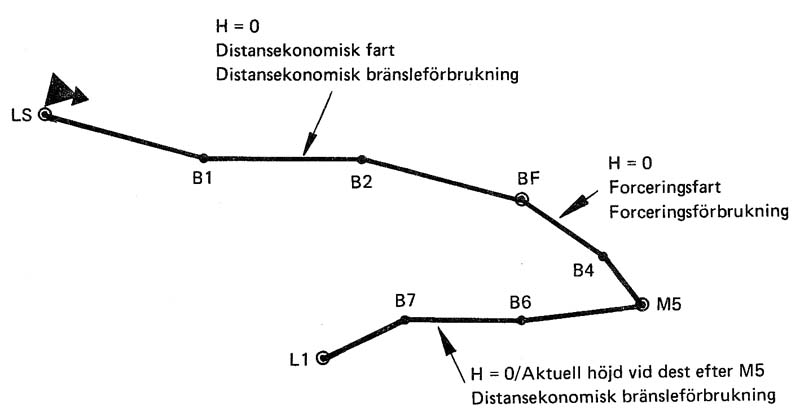
Princip planerat flygtillstånd och
forceringsmachtal inmatat på BF.
Större bild.
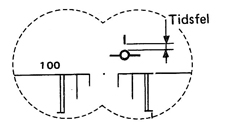
SI presenterar predikterat tidsfel vid mål
(M5).
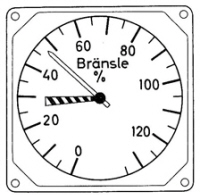
BRI under AI visar aktuell bränslemängd
och behovet på ”slipsen”.
|
Tid-
bränslefunktion.
Under uppdraget erhölls information om tidhållningen och
bränslesituationen på det planerade och i CK definierade
uppdraget.
Tidhållningsfunktionen avsågs att hålla felet i ankomsttid till mål
(M5) inom +-10 sek. vid flygning över B1 - B4 och med planerad forcering
på sträckan BF – M5.
Bränsleuppföljningen syftade till att ange bränslebehovet för
återstående delen av uppdraget fram till landning L1 så att jämförelse
med tillgängligt bränsle kunde ske..
Beräkningarna av ovannämnda funktioner utfördes av CK tid /
bränsleprogram och baserades på mallar med viss flexibilitet, tids- och
bränsletillägg samt vapenlasten. Aktuell bränslemängd och beräknat behov
(”slipsen”) presenterades på BMI.
För Planerat och aktuellt flygtillstånd använde CK för
beräkning av bränslebehovet ett planerat flygtillstånd och för
tidhållningen både detta och aktuellt flygtillstånd vilket
inkluderade pågående fartändring. Under uppdrag med FB inlagt gällde för
fartdelsträckorna ovanstående planerade flygtillstånd med höjder, farter
och bränsleförbrukning.
Presentation av predikterat tidsfel vid mål (M5) gjordes i SI om
K-tid inmatats via DAP genom en förflyttning av Fartvektorns
VFW-s fart- / tidsfelsfena i flygplanets z-led.
Skrivet
av Göran Hawée
Senast
uppdaterad 2020-09-07
Källor:
Beskrivning AJ37, del 1.
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}