|
|
||||||||||||||||||||||||||||||||||||||||||||||
FPL35 Draken, SAAB 35 - Det första svenska Systemflygplanet för jaktuppdrag i överljudsfart.System J35J
Skribent
Göran Hawée Uppdaterad 2020-05-06 BakgrundUnder andra världskriget utvecklades jaktflyget för att bekämpa fientliga bombflygplan, som i huvudsak verkade med insatser mot mål med stor utbredning som industriområden men även bostadsområden i terroriserande syfte. Även eskorterande jaktflyg skulle i viss mån kunna bekämpas varför jaktflygplanen måste ha allsidiga prestanda. De utrustades även för attackuppdrag om vapen fanns tillgängliga och kunde anpassas till flygplanen. Jaktflygplanen var därför försedda med kanoner och raketer och senare även med målsökande robotbeväpning. Flygvapnets jaktförsvar utvecklades under 1940- och till mitten av 1950-talet med en flora av utifrån anskaffade jaktflygplan som J26, J28 och J33 samt de svensktillverkade J21, J22 och J29. Även efterföljarna, den svenska J32B och engelska J34 bidrog till denna utveckling samt blev vägledande för att senare även J35 Draken konstruerades för samma ändamål. Hotbilden, d v s Sovjetisk invasion med bombflyg över Östersjön på hög höjd och med kärnvapen var högst påtaglig under det kalla krigets första hälft. Därför var det viktigt att jaktflyget hade prestanda och beväpning för att kunna nå och bekämpa detta hot.
Parallellt med utvecklingen av J35 Draken pågick vid Kungliga Flygförvaltningens KFF Robotbyrå ett intensivt utvecklingsarbete på en målsökande jaktrobot (RB321), som avsågs bli den första flygburna jaktroboten för direktanfall, d v s bekämpning av målet på mötande kurs. Utvecklingsarbetet avbröts dock och som ersättning anskaffades amerikanska IR- och radarmålsökande jaktrobotar till Drakenflygplanen vilka kunde börja användas från 1963 respektive 1965. Ersättaren till jaktflygplanet J29 Tunnan började planeras redan 1949. Flygvapnets mål var alltså ett överljudsflygplan som var prestanda- och elektronikmässigt optimerat som vapenplattform för direktinsats med robotvapen mot snabba, stora mål på hög höjd samt vara utrustat för flygning och bekämpning i alla väder och mörker av en besättningsman. Det skulle även vara anpassat till det unika svenska krigs- och vägbassystemet BAS 60 samt till en markorganisation med ett utvecklat stridsledningssystem STRIL 60.
INNEHÅLL
J35J
Ombyggnaden till J35J. Utökade taktiska funktioner i J35J Funktionsförlopp visuell inriktning och avfyring av RB27 vid HK (DA)
Flygplan 35 DrakenAllmäntDen första prototypen av flygplan Draken, 35-1 - röd U flög den 25 oktober 1955. Totalt tillverkades 615 Saab 35 Draken i nio versioner. Av dessa utgjorde 19 st provflygplan och 63 st exporterades. Totalt beställde KFF 533 Saab 35, varav fem jaktversioner till Flygvapnet. Dessa jaktflygplan, J35A, B, D, F och J kom att nyttjas operativt vid 10 flygflottiljer och bestå av 24 divisioner Drakenflygplan. J35A avsågs att bli det första systemflygplanet i Draken-familjen. Så blev det dock inte p g a att flera svenska underleverantörer av delsystem inte fick fram utvecklade utrustningar i tid, se J35A Krigsfunktion. J35B och J35D beställdes som uppföljning till leveranserna av J35A, vilka blev utrustade med elektroniksystem som från början var planerad för Draken, d v s dels att kunna genomföra direktanfall mot mål i alla väder och mörker samt dels ledas mot målen med digital dataöverföring via radio utan tal, se J35BD Krigsfunktion. J35F beställdes som uppföljning till leveranserna av J35D och utgjorde den sista versionen av Draken som nytillverkades. Bakgrunden till flygplanets systemutformning var som för J35BD, att i direktanfall mot mål i alla väder och mörker samt ledas mot målen med digital dataöverföring via radio utan tal, se J35F1/2 Krigsfunktion.
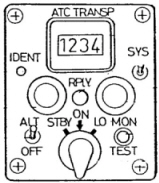
J35JHistorik Under början av 1980-talet förekom förhandlingar mellan Flygvapnet, Försvarets materielverk FMV och statsmakterna om jaktflygets utformning efter 35-systemet planerade avveckling 1983. Leveranserna av JA37, jaktversionen av Viggen blev fördröjda liksom beslut om anskaffning av JAS 39 Gripen. Under 1982 framkom att J35F beväpningssystem kunde avsevärt förbättras till en rimlig kostnad och anpassas till den förändrade hotbilden. FMV undersökte på uppdrag av Chefen för flygvapnet CFV, om förrådsställda J35F2 kunde moderniseras och igångsättas och vilka åtgärder som behövde göras för att kunna ingå i luftförsvaret ytterligare ett antal år framåt in på 1990-talet. CFV-s prioritering av åtgärder var i första hand inom Beväpningssystemet med förbättrade Radar- och Siktesfunktioner, IR-spanare 71N och två nya balklägen för RB24J. Men även inom andra delar i flygplanet uppdaterades avioniksystemet med ett nytt Flyglägesinstrument FLI-35, ett nytt Luftdata LD-8, med en SSR Transponder och med en ny IK-transponder samt ett par nya motor- och reservinstrument. Till IR-spanaren 71N hade ett tillförlitligare kylsystem anskaffats. Det utgjordes av en termisk kylmodul som i drift krävde en hel del kylkapacitet varför en del mekaniska åtgärder vidtogs i flygplanets miljösystem. Dock nåddes inte målupptäcktsprestanda upp till mer än hälften av de ursprungliga värdena när kylsystemet fungerade. Men tillförlitligheten hade ökat markant för systemet och med den för J35J taktiska rollen tillräcklig. 1984 var utredningen klar och FMV, med stöd av ÖB, hemställde hos Regeringen om medel för iordningsställande av 54 st förrådsställda J35F2 för att kunna flygas till 1997. Tiden utökades senare till 1999. Detta beviljades 1985 genom ett regeringsbeslut. Omfattningen av ändringarna motiverade sedermera den nya versionsbeteckning J35J. 1986 fanns utrymme inom ramen för det beviljade medlen och antalet flygplan utökades med 12 flygplan till totalt 66 J35J.
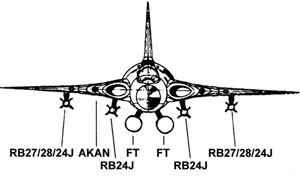
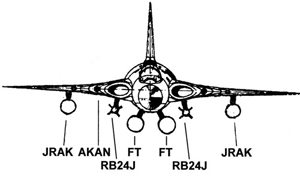
J35J med 2 RB27, 2 RB24J, 2 FT och IR-spanare
Parallellt med dessa undersökningar gjordes även en utredning om anskaffning av ytterligare en division JA37 (16-20 flygplan) förutom de åtta divisioner som redan var beställda för att täcka det operativa jaktbehovet på minst 9 jaktdivisioner fram till det JAS39 kunde börja levereras. Denna utredning lades ned när beslutet kom att J35F2 skulle modifieras och konverteras till J35J varvid mycket pengar sparades.
Utprovningen av det modifierade beväpningssystemet för J35J
Flygplan J35J tekniska
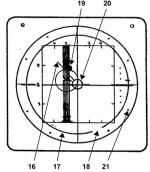
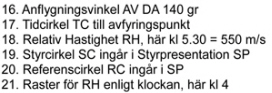
förändringar i dess beväpningssystem och dess olika nya
taktiska fördelar beskrivs i notiserna
Innan ombyggnaden till J35J startade hade utprovningen av de föreslagna modifieringarna i ”Hawée 1 och 2” - paketen införts i ett flygplan J35F1 nr 35427 (P 67) vid F16 som flögs många utprovningspass med anfall på låg höjd mot för J35 predikterad mål typ An-12 CUB och Su-24 FENCER. Anfallsmetoden Hundkurva HK medelst visuell inriktning Head-up var för RB27 helt ny eftersom det tidigare inte funnits faciliteter i varken radarn eller siktet för detta. Målen utgjordes av AJ37 Viggen och TP48 Herkules med anfall i både fram- tvärs- och baksektorn och med Övningsrobot ÖRB27 som registrator på P67. ÖRB27 hade en skarp målsökare varför provvärdena var helt jämförbara med en skarp RB27-s målsökare. Vidare genomfördes under denna period även robotskjutningar med skarpa RB27, fem till antalet vid Robotförsöksplats Norrland RFN i Vidsel mot dragmål Del Mar DF14 efter J32D med radarreflektor och fackla för synbarhet. Vid dessa medföljde även ÖRB27 för parallell registrering av anfallet och efterföljande målföljning, vilket var värdefullt ur utvärderingssynpunkt av systemfunktionerna i flygplanet samt den efterföljande målsökarfunktionerna efter avfyring av den skarpa roboten. I samband med flygningarna mot TP84 Herkules, som ur radarmålareasynpunkt var likvärdig med sovjetiskt mål som An-12 CUB för luftlandsättning, klargjordes att Radarns målföljningsprestanda , tack vare modifieringar i de båda tidigare nämnda modifieringspaketen och RB27 prestanda avseende målföljning mot relativt stora radarmålareor medgav användande på betydligt lägre flyghöjder, speciellt över vatten. Samma resultat uppnåddes vid anfall mot AJ37, som målareamässigt var likvärdig med sovjetiska attackflygplatypen SU-24 FENCER.
Dock visade det sig vid studie av RB27 Prestandahandbok, att dess radaruppbyggda Zonrörssystem för initieringen av verkanssystemet var känslig på låg höjd på grund av mark- eller vattenreflektioner och kunde förväntas utlösa detta på höjder över målsökarens lägsta prestandagräns. Därför gjordes det tidigt undersökningar om förändringar i Zonrörskonstruktionen vid SAAB för att sänka känsligheten till acceptabel låg nivå för att eliminera risken för vådautlösning på låg höjd. Modifiering infördes sedan efterhand i ett tillräckligt stort antal RB27 för att täcka behovet vid en eventuell krigssituation. För utökad provverksamhet av det modifierade beväpningssystemet installerades dessa i 2 st J35F1 och 2 st J25F2 ur F10 i Ängelholm för en av FV ledningen beordrad första Taktisk Utprovning på F10 med flygförare ur 3:e divisionen under ledning av dess flygchef. Utprovning benämndes TU35 och var specifikt inriktat på visuell inriktning av robot RB27 företrädesvis på låg höjd samt i övrigt taktiska användande med de nya modifieringarna. Där inkluderades även skarpa robotskjutning med RB27 vid RFN mot mindre styrda mål typ RB06 eller dragmål Del Mar DF14 efter J32D med ekoförstärkare och fackla. Här framkom enligt TU-35 Hemliga rapport från provperioden bland annat ytterligare smärre önskemål på kompletteringar till modifieringspaketen för att ännu bättre kunna utnyttja systemet i den taktiska miljön. Kompletteringarna, 14 till antalet benämndes flygförarmodifieringar FF-MOD och kom, efter beslut av FV ledning att införas och integreras i huvudpaketet. De skulle dock införas efter det huvudpaketet införts i alla J35J för inte fördröja införandet av detta som enligt FV-ledning ansågs mycket värdefullt ur taktisk synvinkel i sitt ursprungliga skick. De 14 önskemålen redovisas med de förtjänster de hade i den följande beskrivningen av användandet som framkom i TU-35 rapport.
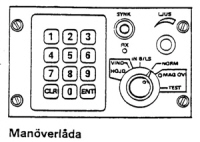
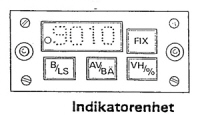
Ombyggnaden till J35J.Ombyggnadsprocessen för J35J utfördes på så sätt att två prototyper J35F2 byggdes om och nyttjades för prov av de modifierade systemdelarna vid Försökscentralen FC under 1987-88. Där ingick förutom radar- och siktesändringarna även resultatet av införandet av ett tillförlitligare kylsystem av IR-spanarens målsökare. Praktiskt gick genomförandet till så att vid Centrala Verkstäderna i Malmslätt CVM utfördes delning av flygplanet, ändring av bakkroppens elinstallation samt hopmontering och de avslutande markproven. Vid SAAB infördes framkroppens balkmodifieringar samt de ingående ändrade elinstallationerna. Alla apparatmodifieringar genomfördes vid Flygflottiljerna F10 och F16 tekniska verkstäder. Efter provflygning av SAAB:s och Försökscentralen FC-s provflygare levererades J35J sedan till FV och F10 under perioden 3 mars 1987 till 29 augusti 1991. Efter detta infördes sedan de 14 kompletteringarna i FF-MOD-paketet vid F10 undan för undan under första delen av 1990-talet. Eftersom flygplan J35J hade fått ny och moderniserad utrustning som något kunde påverka förberedelserna och flygningen under uppdraget, den så kallade Jaktcykeln, ändrades förberedelser och handhavandena något redan före start jämfört med i J35F. Berörda system var FLI-35 som hade bestyckats med en enkel dator för navigeringshjälp under flygning samt SSR Transponder för civil identifiering i luftrummet. Övriga nymodigheter inverkade inte i detta avseende. Förändringarna för dessa system kom att påverka både under mark- och flygskedet men båda delar beskrivs nedan i utdrag ur Skede BEREDSKAP (FÖRVÄRMNING) med System J35F
Flygplanets Huvudströmställaren var alltså i läge TILL och all nödvändiga åtgärder för att snabbt kunna starta hade vidtagits. Alla avionikutrustningar som fordrade tid för uppvärmning var strömsatta i sina respektive uppvärmningslägen för att inom kort tid kunna tas i bruk vid startorder. Där ingick Flyglägesinstrument FLI (TILL och snabbrest) samt Styrautomat SA (TILL), Datasystem DS och Navigeringsradar PN (FÖRV / STRIL), samt Igenkänningsradar IK (BER/TILL). För FLI-35 gällde att förutom snabbresningsförloppet (90 sek) där kurskoordinering ingick att dess dator från en Manöverenhet ME matades med den planerade flygrutten genom positionering för så kallade Brytpunkter, bas/referens- eller LOLA-(Longitud/latitud) -punkter vilka sedan under flygning kunde väljas som destination. Nya Brytpunkter kunde inläsas även under flygning. Datorn matades också med beräknat vindprognos vilken också kunde uppdateras under flygningen. I detta skede under flygning kunde även data utläsas och presenteras på en Indikatorenhet IE i kortfattad klartext/siffror såsom avstånd och kurs till destination samt bränsleåtgång. Efter flygningen kunde även eventuella felyttringar (felkoder) i form av snabbrapport utläsas ur datorn. För SSR Transpondern gällde att den i förvärmningsläge STBY (minst 60 sek) tilldelade svarskod från flygledningen inställdes på vred på dess Manöverenhet ME (gällde för aktuellt flygpass) och avlästes i ett fönster. Därefter ställdes den i ON varefter den hade full funktion. Systemet kunde med begäran från markorganisation identifiera sig i 15 sek då en knapp IDENT på ME trycktes in.
Beväpningssystemets användning i J35JJ35J var alltså en utveckling av J35F2 och hade i sin avionik kvar och intakta dennes ursprungliga beväpning och användande vid jaktuppdragen i samarbetet med markorganisationen STRIL 60:s alla systemfunktioner. Genom det förbättrade beväpningssystemet avseende siktesradarns tålighet mot elektronisk störning (Hawée 1) och radarns och RB27 målföljning på låg höjd och de olika förändringarna för ett förenklat handhavande av Radarsiktets olika funktioner (Hawée 2) samt den utökade robot RB24J- och Jaktraketbeväpningen blev J35J mer anpassad till fiendens förändrade låghöjdsuppträdande mot de olika luftstridskrafter som tidigare nämnts. Även samordningsvinster gentemot JA37 erhölls när J35J kunde täcka luckor i vissa anfallssektorer samt avlasta JA37 för viktigare mål.
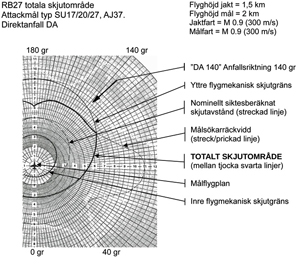
Taktiska uppträdandetI System J35J bestod beväpningen av, som i J35F1/2 för ett första av Radarsiktet beräknat Direktanfall DA med två Falcon-robotar vilka utgjordes av RB27 med radarmålsökare och RB28 med IR-målsökare. Dessa robottyper avsågs att i J35J endast monteras i balkar under vingarna eftersom två Fälltankar FT, monterade under flygkroppen alltid medföljde. För optimal verkan mot störande mål valdes som huvudalternativ en av varje slag, så kallad ”blandad” last. Anfallet utfördes systemmässigt via Radarindikatorn som i J35F1/2, se se Anfall med RB27, RB28 i J35F1/2. med vissa kompletteringar enligt följande beskrivning allteftersom flyguppdraget och anfallet genomlöptes. Anfallsriktningen var ca 140 grader på mötande kurs med RB27 i DA och i ett andra anfall i direkt anslutning till det första med RB28 i Jaktkurva JK upp till 100 grader mot målet. Målets och jaktens farter, Mm respektive Mj var Mach 0,9 (ca 300 m/sek) och målhöjden 2 km och med en närmandehastighet, r´(prick) till målet på ca 550 m/sek. Jakten hade intagit höjdunderläge ca 500 m för bästa målutvärdering ur mark- eller sjöekon, så kallat klotter. Den fortsatta redogörelsen för detta anfall med J35J och de förändringar som detta genomgick startar i Skedet MÅLSPANING (STRIL) Skede II med System J35F.
Vapenpanelen VP i J35J
Med radarn initialt i läge TILL på Vapenpanelen VP försåg nu vågledarna och sändaren med vågledarluft för att minimera tiden till 1 sek (tidigare ca 12 sek) för uppstartning av sändaren i läge TYST eller SÄNDN. I läge TYST var nu inte sändaren i gång till Konstlast som tidigare för att snabbt få uteffekt till antennen vid läge SÄNDN. På så vis röjde inte heller radarn sig själv i läge TYST, vilket tidigare var fallet genom att effekt ”läckte” ut i antennen genom en ”stängd” vågledarväxel. Den ändrade logiken innebar att sändaren kunde startades med effekt ut till antennen i läge TYST på VP under förutsättning att flygplanet hade ”roterat” för lättning (noshjulet utfjädrat) och därefter vid val RR (ej IR) med RR/IR -omkopplaren och samtidigt kommenderad Följning Till FT genom manöver F1–F0 på F0/F1/F2 – omkopplaren eller intryckning av Snabbvapenval RR SNARR på radarns Handkontroll HKR. (SNARR-funktionen beskrivs utförligare i avsnitt Utökade taktiska funktioner i J35J nedan). Kontinuerlig sändning kunde fortfarande erhållas i läge SÄNDN på VP. Denna logik innebar att sändaren helt kunde manövreras från HKR utan extra titt ned på VP.
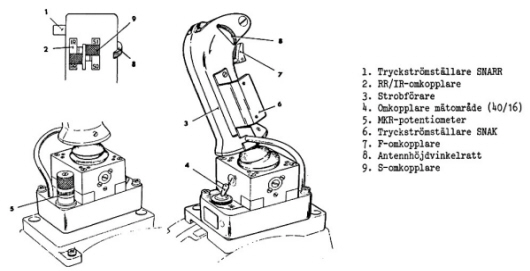
PS Handkontroll HKR
Vid vapenvalet hade även vapenväljarens lägen ändrats något enär valet BL (Blandad avfyring RB27/28), omkopplarläget mellan RR och IR hade utgått eftersom det alternativet krävde att minst en robot hängde på i balk på flygplankroppen där nu FT-ar hängde. Det ”lediga” läget nyttjades till att ge de nya balklägena under luftintagen för RB24J ett eget vapenvalsläge RB 24 viket placerades mellan läge FRÅN och AKAN. I nedan beskrivna anfall valdes RB27 med vapenväljaren i läge RR.
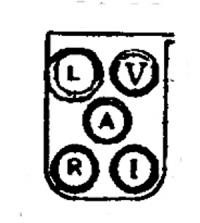
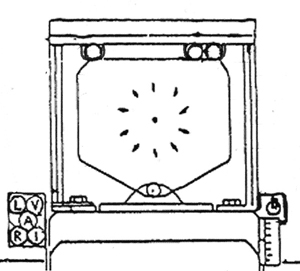
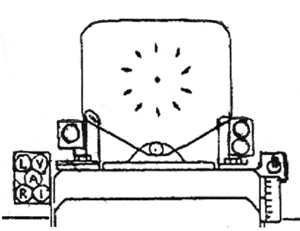
Vapenindikator VI
På en Vapenindikator VI till vänster om Sikteshuvudet SH visades på lampor märkta L, V, A, R och I på på VP initialt valda vapen. Inga lampor lyste i lägena FRÅN och FÖLJN. Lamporna L eller V indikerade val av RB24J och lampa A indikerade val av Automatkanon AKAN. Vid ovannämnda val RR lyste lampan R eftersom en RB27 fanns hängd och identifierade sig som sådan mot och av systemet. Lampa I lyste och indikerade att RB28 fanns hängd val IR på vapenväljaren.
Prepareringen av RB27 (även RB28 sedan mitten av 1970-talet) startade med att samtliga hängda RB27 och RB28 påfördes låg glödspänning till sina elektronrör från flygplanet kraftförsörjningssystem till robotarnas elektronrör vid villkoret Yttre kraft från Siktet, med start från det flygplanets noshjul fällts in och varade i 15 sek. Detta var en av de nya åtgärderna för att korta ned den senare A-prepareringstiden för RB27, se nedan.
Radarpanel RP
Under målspaning kunde siktesradarns sändare svepas i frekvens under spaningsskedet maximalt ca 500 MHz runt de med kavitet predikterade fem robotfrekvenserna för RB27. Tidsåtgången var 3 sekunder mellan ändlägena medan tidigare svep ca 1000 MHz tog 9 sek. Svepet åstadkoms med att knappen F0/F1/F2 på HKR manövrerades till F2-läge på HKR och så länge den hölls där svepte frekvensen fram och tillbaka över frekvensområdet. Områdesminskningen möjliggjorde, tillsammans med ovannämnda åtgärd för glödspänningsförsörjningen att kunna korta ned A- prepareringstiden från 9 sek till 3 sek för RB27samt att också kunna nyttja svepets tidigare manöverknapp VAR på HKR för initiering av snabbval AKAN (SNAK). (Funktionen beskrivs utförligare i avsnitt Utökade taktiska funktioner i J35J nedan). Grundinställningen av radarfunktionerna initialt ändrats nu i avseende på optimering av radarns låghöjdsprestanda med följande åtgärder på RP, VP och HKR.. En åtgärd var att välja logaritmisk LOG mottagarförstärkning med LIN/LOG-omkopplaren på RP för bättre urskiljning av målekot ur mark- och vattenekon, så kallat klotter. Funktionen fanns även från början i J35F men påverkade då endast videosignalen Video 2 till radarindikatorn och hade ingen påverkan på målföljningen som sådan. Efter det att Video 2 nu även kopplades till avståndsföljekretsarna (Hawée 1) blev målföljning möjlig på avsevärt lägre höjder än 2 – 3 km som var gränsen tidigare. En annan åtgärd vara manövrera ratten Manuell Förstärkningsreglering MKR till max-läget på HKR, vilket ökade förstärkningen i Video 2 och därmed i följekretsarna vilket gav optimal känslighet för avståndsmålföljningen. En ytterligare åtgärd var möjlighet till val av Strobavståndsberoende Känslighetsreglering SKR (Närekodämpare NED). SKR-funktionen valdes med strömställaren 2 LINJ/4 LINJ i läge 2 LINJ på VP. Detta innebar att vid positionsstyrning av radarns avståndsmarkör (stroben) eller vid dess följning på ett måleko passerade ca 11 km mot närmare avstånd började radarmottagarens känslighet minskas i motsvarande grad som den reflekterade målsignalen tilltog. SKR kunde omvänt väljas bort med strömställaren 2 LINJ/4 LINJ i läge 4 LINJ i speciella lägen för att optimera målföljningen, exempelvis ”radarkollon”, då flygplan radarföljde på varandra på visst avstånd efter start. En ytterligare annan åtgärd, som behövde göras i förebyggande syfte var att om radarns antennföljningssystem kom att utsättas för elektronisk vinkelstörning var att välja ”variabel spinnfrekvens” på radarantennloben. Detta verkställdes med strömställare JITT i läge TILL på RP. Härvid varierade spinnfrekvensen ca 8 Hz/2 sek och försvårade inmätning av denna och därmed försvårades avhakning av antennen från målekot.
Under den fortsatta målspaningen och senare målföljningen var det ur både flyghöjd- och elektronisk störningssysnpunkt viktigt att IR-spanaren fick utrymme för användning. Visserligen var dess prestanda reducerad men ändå tillräcklig för att målspaning för målupptäckt och målföljning i höjd- och sidled (vinkelföljning) och med radarn som avståndsföljare, så kallad blandad följning. I det senare fallet krävdes dock att radarsändaren startades och sände i läge SÄNDN på VP. Med läge TYST inställt på VP och läge IR valts på RR/IR-omkopplaren på HKR startade inte radarsändaren utan systemet gick radartyst medan IR-spanaren spanade och kunde beordras att följa på målet. Denna ändring hade kommit till för att kunna manövrera radarsändaren från HKR Head-up och snabbt när jakten så sent som möjligt ville röja sig i målets eventuella bakomvarnare men ändå hade viss kontroll på vad målet befann sig. Användandet var fördelaktigt vid anfall med RB28 då ingen sändning behövde ske alls och prepareringar och AVF gjordes efter tumregler. Behövdes avståndsangivelse till målet kunde det grovt erhållas från STRIL via styrdata eller genom korta starter av radarsändaren med omkopplaren RR / IR i läge RR på HKR, se (Utökade taktiska funktioner i J35J). Anfall med RB27 och läge TYST på VP genomfördes inledningsvis på samma sätt som med RB28 Anfallet startade lämpligen med IR-spanaren följande på målet med radarantennen slavad till dennes målsökare. Målavståndet kunde hållas från STRI och eventuella korta sändningsintervaller. A-preparering utfördes manuellt med Os på SS i tid före B-prepareringen. Vid minst 5-6 sek innan AVF måste B-prep initieras samt starta radarsändaren med val RR på RR / IR på HKR för att avståndslåsning skulle etableras och avstånds- och frekvensslavning i roboten skulle hinna genomföras före det AVF skulle ske. Radarantennen övertog då också vinkelföljningen. Vid Cs initierades AVF. Efter AVF måste sändaren sedan arbeta och antennen belysa målet tills roboten var framme vid målet. Därefter stängdes sändaren av med val IR på RR / IR på HKR.
När siktesradarns avståndsmarkör och målekot sammanföll övergick presentationen på radarindikatorn till F-scop. Initialt tändes Anflygningsvinkelmarkören AV och efter 2 sekunder var inlåsningförloppet klart och full presentation visas för DA. Där ingick förutom AV en Tidscirkel TC, en Referenscirkel RC och en Styrcirkel SC. Längden på AV speglar målets fart, i fallet nedan ca 320 m/sekund samt jaktflygplanets anflygningsvinkel mot den beräknade kollisionspunkten för målet och roboten efter Avfyring AVF. Nedräkningen i tid av siktet vid DA startade vid ca 30 sekunder kvar till beräknat nominellt skjutavstånd, i detta fall vid målavstånd ca 21,5 km. TC visade då maximal storlek och med en lucka ”klockan 3:20” vilket motsvarade närmandehastigheten 320 m/sek till målet. Denna presentation varade sedan tills 10 sekunder kvar till nominellt skjutavstånd genom att siktet initierade s k A-signal As. Målavståndet var då ca 10,5 km och TC minskade i ett språng till motsvarande storlek. Radarns mätområde ändras med manöver på HKR från 40 km till 16 km. Under tiden hade styrfelet, som presenterades på SC för anfallsprofilen DA med flygplanmanöver styrts in i RC och hölls där sedan under resten av anfallet fram till AVF. RC hade här initialt hade sin ”stora” storlek.
As startade A-prepareringen av valda robotar varvid förhöjd glödspänning påfördes dessa i 3 sek förutsatt att 15 sekunder förflutit med låg glödspänning från infällt noshjul. Vidare startade grovslavning av radarsändarens och RB27 mottagares valda kavitetsfrekvens vilken var klar inom 3 sek. Kavitetsfrekvensen var inställd av markpersonal på order från stridsplan. Vid prepareringsstarten tändes Grön lampa uppe till vänster framför radarindikatorn. Även Röd lampa till höger framför radarindikatorn tändas om inte vapensystemet Osäkrats Os på Styrspaken SS-s Os-, Prep- och AVF-bygel. Därefter påfördes normal glödspänning till robotarnas elektronrör. Fördelen med den senarelagda As (TC krymp) var att korta ner A-prepareringstiden vid alla anfallstyper med RB27 och att minska uppvärmningstiden av robotarnas målsökningskretsar viket kunde skada dessa.
Styrspaken SS med Os-, Prep- och AVF-bygeln överst.
A-prepareringen kunde även startas manuellt med Os på SS före As från siktet.
B-prepareringen av vald robot startades alltid manuellt av flygföraren oavsett anfallstyp, dock tidigast efter A-prepareringens slut. Den utfördes från SS Os, Prep och AVF-bygel. Initieringen av B-prep kunde göras tidigare än när A-prepareringen var klar och då starta den automatiskt när den var klar. Samtidigt inkopplades robotens egna batteri för inre kraftförsörjning vilket indikerades på radarindikatorn med att konsthorisonten delade sig och Röd lampa till höger framför radarindikatorn tändes. Prepareringen varade i 3 sekunder varefter den Röda lampan släcktes. Tidigare P-prepareringstid var 6 sek vilket orsakades av robotarnas begränsade slavningshastighet till 10 grader/sekund som vid DA mot mycket snabba mål på hög höjd kunde gå till 40 grader. Den typen av anfall uteslöts med J35J. Ändringen till att systemet alltid krävde manuell preparering var, att ge frihet vid siktesberäknat anfall kunna tidigarelägga dessa beroende på målets uppträdande eller vid eventuell påverkan av elektronisk störning mot siktesradarn. En annan del var att kunna korta ner totala prepareringstiden vid alla typer av anfall med RB27 för att snabbare göra roboten tillgänglig för avfyring.
Vid 1,25 sek kvar till nominellt skjutavstånd initierade siktet så kallad C-signal Cs, vilket indikerades på att RC minskade till halva storleken vilket gav besked om rätt avfyringstillfälle vid DA. Målavståndet var ca 5,5 km och manöver för AVF på SS AVF-bygel indikerades med ett kryss på radarindikatorn. RB lämnade flygplanet vid ca 5,0 km målavstånd ungefär samtidigt som krysset försvann och föraren släppte avfyringsbygeln. När nominellt skjutavstånd passerades, 1,25 sek efter Cs kopplade siktet om till JK-beräkning med presentation på TC för tid kvar till kollision med målet och styrinformation för JK på SC. Om TC, vid eventuell målrörelse eller elektronisk störning ”backade” tillbaka till DA-beräkning, ”låste” inte systemet i JK-funktionen som tidigare vilket kunde ge sken av att systemet var kvar i DA-beräkningen vilket då utgjorde en risk för att i ivern tidsmässigt ”jaga” nominellt skjutavstånd och därmed snabbt komma innanför robotens inre skjutgräns. När RB27 avfyrats och lämnat upphängningsbalken slocknade lampa R på VI. Om det fanns ännu en RB27 i lasten, förblev lampan tänd tills även denna RB27 avfyrats. Fanns i stället en RB28 kvar i lasten valde systemet automatiskt denna varvid lampan R slocknade och lampa I tändes på VI. Denna i sin tur slocknade när RB28 avfyrats och lämnat upphängningsbalken. Robotarna avfyrades manuellt från SS AVF-bygel och det kunde ske även om inte Cs passerats. Härvid kunde en roboten avfyras även med hjälp av tumregler vid exempelvis elektronisk störning mot siktesradarn. Avfyringspunkten i tid sett i DA var så beräknad att RB27 och RB28 skulle lämna flygplanet mitt mellan yttre och inre skjutgränsen för det aktuella flygfallet. Härför presenterades inte dessa gränser. Därmed blev också inriktningsfelet, avläst på SC inte så kritiskt om målet gick på rak bana till träff. Det fanns då utrymme för RB att hinna korrigera in till rätt bana (syftbäringskurs) vid för tidigt eller sen AVF. Om målet däremot avvek i kurs (undanmanöver UMAN) under RB:s gångtid var marginalerna för avvikande inriktningen relativt små.
RB27 och RB28 kunde avfyras trots AVBRYT-indikering vid en eventuell utdragen B-prepareringstid mer än 53 sek. För RB28 gällde att göra det omedelbart eftersom dess kylsystem för målsökaren var slut efter ca 60 sekunder från B-prepareringen startat. För RB27 gällde bara att ta hänsyn till robotbatteriets kapacitet som kunde hållas i ca 120 sekunder från B-prepareringen startat. Med RB27 vald och B-preparerad kunde bortkoppling av AVBRYT-funktionen och B-prepareringen avbrytas genom Os av systemet på SS Os-bygel. Systemet gick då tillbaka till tillståndet före före A-preparering och kopplade även bort robotbatteriet från sin belastning som fortfarande hade kapacitet för ca 60 sekunders B-preparering. Det tillståndet kunde vara i mer än en timme utan att batteriet nämnvärt tappade kapacitet. Därför kunde den valda RB27 åter B-prepareras och bli tillgänglig för att avfyras till och med i ett senare flygpass. Vid ovan beskrivna bortkoppling av AVBRYT-funktionen och B-prepareringen fördröjdes nedkopplingen i 3 sek för att ge robotmålsökaren återslavningstid motsvarande 30 grader mot rakt fram-läge för att ge målsökaren ett gynnsamt utgångsläge inför en eventuell ny B-preparering och slavning. När RB28 inriktas visuellt med Hundkurveanfall HK, mot målet, se Visuell inflygning med RB28 i J35F2 med olåst radar styrde systemet automatiskt FRAM/BAK-valet till BAK-läge för att eliminera glömska av att göra detta i stridens hetta. Valet gjordes med vapenväljaren i läge IR (eller SNARR och endast RB28 i lasten) vilket också indikerades på VI med att lampa I tändes. När RB28 var avfyrad slocknade lampan I eller så valde systemet RR, om RB27 fanns i lasten och lampa R tändes på VI.
Efter ombyggnad av J35J kunde även RB24J hängas i balkar under vingarna och inriktades genom beräkning av siktet eller visuellt i HK se Anfall med RB24 i J35F2. Valet av robotarna gjordes med vapenväljaren i läge RAK + RB 24, SER + IMP på VP samt att lampa V tändes på VI och ett ”fast riktmärke” (röd punkt) tändes i gyrosiktets reflexglas. De avfyrades en och en i läge IMP och båda i läge SER. Lampan V slocknade på VI efter andra avfyringen. Målsökarsignal erhölls från vänster robot initialt och från höger efter AVF av denna.
Som kompletterande alternativ vapenlast under vingarna kunde i balkar även jaktraketer JRAK i kapsel om 19 raketer i varje hängas för anfall bakifrån eller vid attackuppdrag mot markmål. Dessa valdes med läge RAK + RB 24, SER + IMP på VP och lampa V tändes på VI. De inriktades visuellt via gyrosiktet som i detta läge kunde vare ett ”fast riktmärke” (röd punkt) eller ett avlänkat riktmärke med ruteresscirkel i gyrosiktets reflexglas. Det senare var dumpat och styvt samt pekade i raketernas upphängningsriktning, allt styrt från siktet. Riktmärkena valdes med ljusstyrkereglage för respektive. Kapslarna avfyrades en och en i läge IMP och båda i läge SER. Lampan V på VI slocknade efter andra avfyringen.
Ytterligare vapenlast utgjordes efter ombyggnad till J35J av två RB24J monterade på lavett på separata balkar under flygplanets luftintag. De inriktades genom siktesberäknad anflygning eller visuell inriktning i HK, då det ”fasta riktmärket” (röd punkt) tändes i gyrosiktets reflexglas, se Anfall med RB24 i J35F2. De valdes med ett nytt läge RB 24 (ersatte det tidigare BL) på VP och indikerades på lampa L tändes på VI. Val av första robot för tonsignal och AVF var den vänstra roboten. Efter AVF av denna valde systemet automatiskt den högra roboten oavsett om den vänstra avfyrades eller ej för tonsignal och AVF. När nästa AVF verkställts slocknade lampa L och lampa V tändes på VI för fortsatt val för tonsignal och AVF av vänsterhängd RB24J under vingen.
Som komplement fanns, som i J35F1/2 en 30 mm AKAN m/55. Efter ombyggnad till J35J kunde 120 skott laddas i magasinet för visuell inriktning i JK, se Anfall med AKAN i J35F2. Den valdes historiskt med läge AKAN på VP och ingen indikering fanns Head upp för att läget var valt. Efter införande av SNAK, se (Utökade taktiska funktioner i J35J nedan) tändes A på VI. Och slocknade när annat vapenval gjordes.
Utökade taktiska funktioner i J35JVid ombyggnaden till J35J infördes också en efterlängtad facilitet som medgav att vapenläget AKAN kunde inkopplas med en snabbvalsfunktion SNAK med knappen på höger sida på HKR (tidigare VAR). Den enkla tekniska lösningen innebar även att beslut togs att vapenläget RR skulle få samma funktion med bäring på den nya funktionen med visuell inriktning av RB27, se Funktionsförlopp visuell inriktning och avfyring av RB27 vid HK (DA) nedan. Funktionen fick benämningen SNARR och initierades med en knapp uppe till höger på HKR (tidigare RB vilkens funktion utgick). När SNAK eller SNARR aktiverades kopplades respektive omkopplarlägen på VP helt bort och alla funktioner för inriktning och avfyring av AKAN och RB27 kopplades in. Vid dessa ändringar infördes även den tidigare beskrivna VI vilken gav nödvändig Head up-indikering på lampa A och R. Detta innebar att flygföraren i stridens hetta sekundsnabbt kund övergå i visuell inriktning i JK respektive HK mot mål med dessa vapen. För att återkoppla systemet till VP omkopplare manövrerades knappen F0/F1/F2 till F2-F0 på HKR alternativt gjordes en lägesförändring på vapenväljaromkopplaren på VP. Respektive tänd lampa A eller R på VI slocknade då och VI indikerade valet på på VP. Med dessa vitala ändringar samt ytterligare för radarn nya funktioner samlades den mesta manövreringen av radar, sikte och vapen i den taktiska miljön till HKR vilket gav ett betydligt större utrymme för visuella målkontakter och bekämpning företrädesvis mot mål på låg flyghöjd.
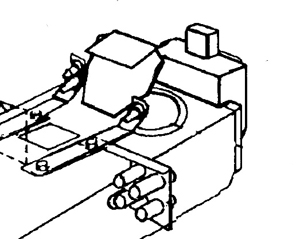
Radarns HKR med knappar för SNAK och SNARR samt övriga knappar och reglage för manövrering av radarn.
Andra ändringar i J35J beväpningssystem förstärkte flygplanets bekämpningsförmåga specifikt för robot RB27 genom möjlighet att på ett relativt enkelt sätt inrikta roboten visuellt genom gyrosiktet i HK och med den nödvändiga avståndslåsning etablerad. För den skull utvecklades, förutom VI ytterligare Head up-indikeringar för att ge information om radarns, siktets och robotens funktionstillstånd under anflygningsfasen och vid AVF av denne. Indikeringarna bestod av lampor vars färg och placering gav information när de lyste om att de nödvändiga villkoren var uppfyllda från radarn och siktet till RB27. För radarn krävdes att den antingen avståndsföljde på målekot, Grön lampa AV tänd indikerade detta och att rätt avstånd slavades till RB27 avståndsport vid B-preparering. Alternativt kunde brus- eller CW-störning erhållas från målet, så kallad Egenstörning ES, varvid Gul lampa BCL (Brus- eller CW-larm) var tänd i stället för AV. RB27 hade en egen BCL-funktion för följning på larmet i sin mottagare men vars inkopplingströskel var fast. Radarns BCL-tröskel var dock justerbar och så trimmad att den indikerade något över RB27 BCL-tröskel för att säkerställa att RB27 målsökare hade tillräcklig störsignal för följning då denna. Från siktet styrde ett villkor B-prep för att B-preparering startat och var klart, Grön lampa benämnd PK * AVF (roboten B-preparerad men ej avfyrad) tändes samt efter AVF av RB27 släckas när denne lämnat robotbalken. Vid utprovningen av systemet användes en hög placering av lamporna på ett befintligt kamerastöd för registrerkamera RKA-14C, vilket var lämpligt för att ge bästa registreringen av lamporna via periferiseendet. RKA-14C skulle senare ersättas med en Registrerkamera RKA-51 (CCD) i ett antal flygplan för registrering på en Videobandspelare VB 1 vid anfall med bland annat visuell inriktning av RB27. För att även lampornas skulle kunna komma med på videobandet måste de flyttas till det nedre läget.
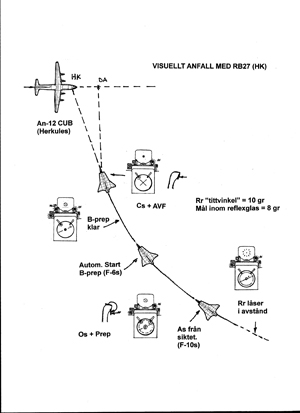
Funktionsförlopp visuell inriktning och avfyring av RB27 vid HK (DA)Innan anfallet kom in i sitt egentliga startläge gjordes vissa förinställningar redan tidigt i uppdraget eller senare inför anfallet. Där ingick i tur och ordning att utföra följande åtgärder:
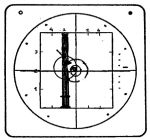
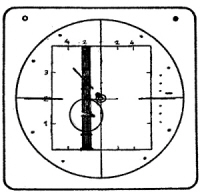
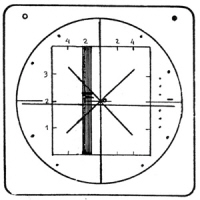
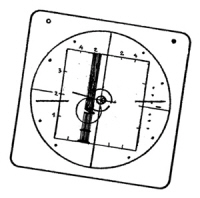
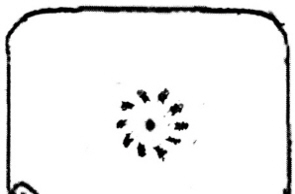
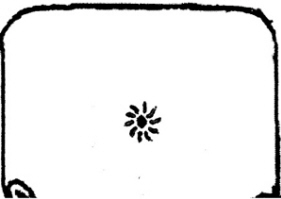
På lämpligt bedömt avstånd till målet initierades vapenval SNARR på HKR varvid radarsändaren startade. Vidare styrde radarlogiken radarantennen till att peka 0 gr i sida och med den förinställda ratten AHV på HKR i snäppläge pekade radarantennen och robotens arreterade målsökares i robotbalkarnas längdriktning, 2,2 grader dumpade i förhållande till flygplanvingens anfallsvinkel ALFA. Vidare styrdes radarns mätoråde till 16 km skala samtidigt som omställningshastigheten för avståndsmarkören (stroben) reducerades från ca 1200 m/sek till max ca 500 m/sek och dess omställningsområde koordinerades till mätorådet. Samtidigt aktiverades även radarns avståndsföljekretsar för automatisk låsning på målekot när detta sammanföll med avståndsmarkören i avståndsled. Det senare var som tidigare nämnts avgörande information för att RB27 målsökare skulle få målet i sin avståndsföljelucka innan avfyring. I siktesfunktionerna hände vid SNARR att vapenvalet accentuerades till vapenläget RR varvid RB27 valdes om sådan fanns hängd, i annat fall RB28 om sådan fanns i vapenlasten. Vidare arreterades gyrosiktets riktmärke i SH reflexglas till att peka i robotbalkarnas längdriktning och ruteresscirkeln i reflexglaset visade sin maximala storlek i avvaktan på radarns mållåsning och siktets beräknande av tiden kvar till nominella skjutavstånd i DA för aktuellt robotval, RB27 eller RB28. Vid bedömt läge för att etablera avståndsmåljföljning fördes reglaget på HKR för avståndsmarkören framåt till reglagets mekaniska snäppläge (mitt emellan dessa min- och maxlägen) varvid markören börjar vandra mot ca 8 km avstånd med hastigheten ca 500 m/sek. När radarns avståndsmarkör och målekot sammanföll, vilket säkert kunde erhållas om målets läge visuellt hölls inom SH reflexglas, drog radarns Låsrelä LR som i sin tur initierade ett relä för tändning av Anflygningsvinkeln AV på radarindikatorn och Grön lampan AV vid SH. Efter 2 sek hade radarns följekretsar etablerat full funktion och radarsiktet stabiliserat sin beräkning av tid kvar till As (i tid ersatt Bs som utgått), 10 sek kvar och senare Cs, 1,2 sek kvar till nominellt skjutavstånd i DA. Indikeringarna om dessa tider presenterades Head up på ruteresscirkeln i SH reflexglas på så sätt att dess storlek ändrades från maximal diameter, se bilder ovan till något mindre än halva denna vid As och till minimal storlek vid Cs, bilderna nedan vilket var till hjälp när A- och C-och även indirekt B-preparering lämpligen skulle initieras.
Eftersom tidsvillkoret Bs utgått för initieringen av B-prep startades den nu manuellt rutinmässigt direkt vid eller med fördröjning efter As genom bedömning hur anfallet gestaltade sig. Detta utfördes med AVF-bygeln på SS. Om B-prep behövde forceras kunde det göras direkt efter Os varvid den startade automatiskt när A-prepareringen var klar. De nödvändiga tiderna för A-, och B-prepareringarna som måst genomlöpas var som tidigare nämnts 3 + 3 sek innan AVF kund ske vilken i sin tur tog ca 1,5 sek. Totalt kunde RB27 avskjutas tidigast inom 7 – 8 sekunder mot tidigare 16 – 17 sek. B-prepareringen indikerades klar på den Grön lampa PK * AVF (roboten B-preparerad men ej avfyrad) som tändes vid SH. Lampans släckning var i tid specifikt anpassad till när en skarp robot lämnade balken. Det var viktigt att hålla AVF-bygeln inne tills dess, i annat fall kunde avfyringsförloppet avbrytas och roboten bli obrukbar det flygpasset. När nominellt skjutavstånd för DA passerades, 1,25 sek efter Cs var det även vid HK lämpligt att initiera AVF av RB27 inom dess yttre och inre flygmekaniska skjutgränser samt RB27 målsökares räckvidd förutsatt att fartskillnaderna mellan jakt och mål var fördelaktiga. Detta illustreras i nedanstående anfallsprofil med respektive presentation Head up vid SH och på Radarindikatorn i de olika skedena som presenterats ovan.
Visuellt anfall i HK med RB27 mot predikterat mål An-12. Målfart M 0,6 och Jaktfart M 0,9.
Roboten avfyrades manuellt från styrspakens AVF-bygel och kunde därför ske även om inte Cs passerats i ett tidigare skede än inom robotens skjutgränser med hjälp av kännedom om målets och jaktens fart enligt tumregler exempelvis när gränserna smalnade av och inre skjutgränsen bedömdes närmade sig det nominella skjutavståndet, vilket ju indikerades vid övergång till minsta storlek på ruteresscirkeln. Kännedom om målets fart kunde erhållas från markorganisationen STRIL via styrdata eller genom en snabbtitt på längden på AV på radarindikatorn och den egna på MF-indikatorn i kabinen. Under robotgångtiden krävdes att målet belystes med radareffekt för att RB27 målsökare skulle få reflekterade pulser att styra efter mot målet. Vid HK måste detta ske med att den fasta radarantennen styrdes med flygplanet med riktning mot målet. I radarn hade dock en modifieringarna (Hawée 2) införts i radarlogiken så att övergång till antennföljning på målekot kunde göras med ett enkelt snabbt handgrepp F1 -F0 på HKR. Förutsättningen för att detta lyckades och avståndsföljningen bibehölls (en förutsättning för antennföljning) var att reglaget för avståndsmarkören stod i sitt snäppläge samt att samma reglage var mittställd (SVM på radarindikatorn i mittläge). I annat fall kunde oturligt radarn låsa upp vid övergången i logiken mellan manövern F1 – F0. Med den faciliteten kunde omedelbart styrfelet som orsakats av HK-profilen styras bort Head down med hjälp av informationen på radarindikatorn varvid skjutgränserna ånyo öppnade sig avsevärt och motsvarade det som gällde för DA-profilen. I detta läge behövde inte radarantennen inte heller riktas mot målet med flygplanet för belysning åt roboten utan flygplanet kunde undanmanövreras under robotgångtiden. Dock öppnades det läget för risken att vinkelstörning från målet kunde påverka radarantennes följning. Dock var HK-belysning att föredra om risk för vinkelstörning från målet kunde befaras.
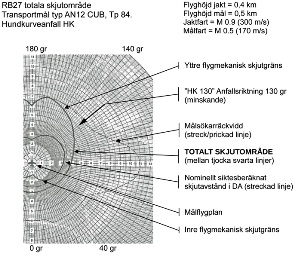
Skjutgränser för RB27 i detta flygfall, anfallsriktning 130 grader inledningsvis.
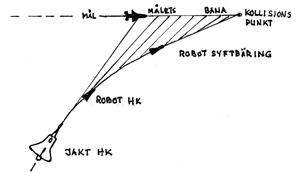
RB27 accelererade när den lämnade flygplanet till M 3,0 (inkl flygplanets fart) och styrd sedan efter insväng mot sin så kallad ”syftbäringskurs” mot en kollisionspunkt med målet. Efter ca 6 sek (ca 4,5 – 5 km robotgångsträcka i detta fall) detonerade robotens sprängladdning från signal från dess känsliga ZON-rörsutlösning vid nära målpassage eller vid anslag i målet.
RB27 flygbana enligt syftbäringsprincipen
När nominellt skjutavstånd för DA passerades, 1,25 sek efter Cs var det även vid HK lämpligt att initiera AVF av RB27 inom dess yttre och inre flygmekaniska skjutgränser samt RB27 målsökares räckvidd. De flygmekaniska gränserna var dock mycket beroende på målets och jaktens fart och fartförhållande. Principiellt kan sägas att ju lägre målfart och/eller större fartförhållande jakt / mål, ju mer vidgades inre- och yttre skjutgränserna för roboten vilket medförde möjlighet till större träffsannolikhet vid AVF på tidsangivelserna på ruteresscirkeln från siktet. Vid det omvända förhållandet med ökande målfart och/eller minskande fartförhållande krympte skjutgränsområdet successivt företrädesvis i anfallsriktning 90 grader vilket förklarades av att roboten där måste svänga längsta tiden i banan innan dess ”syftbärningskurs” uppnåddes.
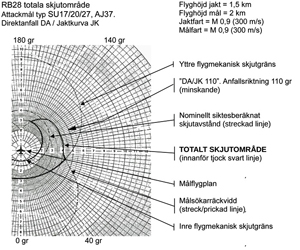
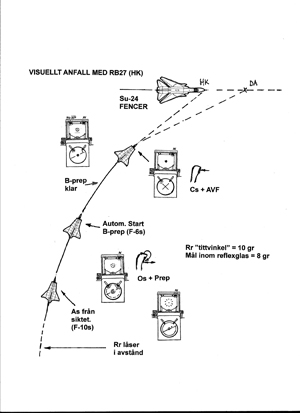
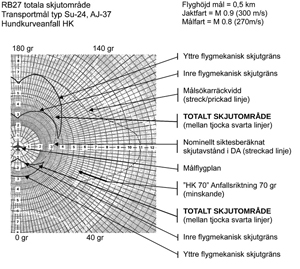
Visuellt anfall i HK med RB27 mot predikterat mål Su-24. Målfart M 0,8 och Jaktfart M 0,9.
Skjutgränser för RB27 i detta flygfall, anfallsriktning HK 70 grader inledningsvis.
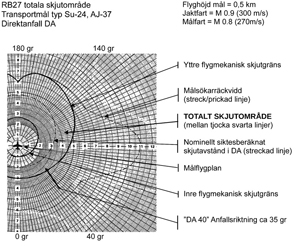
I radarn hade som tidigare nämnts vid modifieringarna (Hawée 2) införts en ändring i logiken så att övergång till antennföljning på målekot kunde göras med ett enkelt snabbt handgrepp F1 -F0 på HKR. Härvid kunde omedelbart styrfelet som orsakats av HK-profilen styras bort Head down med hjälp av informationen på radarindikatorn varvid skjutgränserna ånyo öppnade sig avsevärt och motsvarade det som gällde för DA-profilen, se bild nedan. I detta flygfall var denna åtgärd nog nödvändig, i annat fall krävdes inflygning till en lite sektor inom 10 – 25 grader i bakomläge på målet för AVF och möjlig träffsannolikhet, se bild ovan..
Skjutgränser för RB27 i detta flygfall, anfallsriktning DA 40 grader fram till AVF.
När RB27 lämnat upphängningsbalken slocknade lampa R på VI. Om det fanns ännu en RB27 i lasten, förblev lampan tänd tills även denna RB27 avfyrats. Fanns i stället en RB28 kvar i lasten valde systemet automatiskt denna varvid lampan R slocknade och lampa I tändes på VI. Denna i sin tur slocknade när RB28 avfyrats och lämnat upphängningsbalken.
Skedet ÅTERFLYGNINGDetta inleddes med att välja landningsbas på FLI-35 ML varvid info om kurs och bränsleåtgång erhölls på systemets IE. Alternativt eller parallellt erhölls återflygningskurs även från STRIL vilket beskrivs nedan. Sedan genomfördes skedet med samma utrustning och med samma funktion som i J35F1/2. Det inleddes med kommandon från Rrjal i Fas 1 och fortsatte i Fas 2 med information från flygplanets Navigeringsutrustning i NAV- funktion och pilotens val av NAVRIKT, NAV 400 och NAV 40 med av DC framräknade planébanor och avslutades med information från funktionen LANDN avseende inflygningsbanor. Hela förloppet beskrivs i artikel FPL35 Draken, SAAB 35 – 35BD avsnittet Skedet ÅTERFLYGNING.
Skede KLARGÖRING.Klargöring av J35J för nytt jaktuppdrag var normalt avklarat på mindre än 10 minuter ofta med piloten kvar i kabinen (om inget tekniskt fel behövde åtgärdas) varvid Jaktcykeln var blev sluten när flygplanet anmäldes flygklart igen och en ny cykel kunde börja….
Sammanfattning.Ett jaktuppdrag med J35J kunde alltså, när alla delar i Jaktprofilen fungerade som de skulle, genomföras utan att ett enda ord sades mellan markorganisationen och jaktflygplanet vilket hade kunna avlyssnats och röjt uppdraget. Och ändå presenterades alla nödvändiga data och direktiv i alla delar av uppdraget för att komma till ett säker utgångsläge för anfall mot och bekämpning av det utvalda målet samt att återflyga till och landa på en lämplig flygbas. Samtidigt bidrog de markbundna Styrdatasändarnas höga uteffekt (endast en tiondel nyttjades under fredstid) och den bakåtriktade antennen i flygplanet för datamottagning till att styrdatasystemet var mycket svårt att avsiktligt störa ut. System J35J utgjorde med den ändrade utformningen och de nya funktionerna för taktiskt uppträdande ett bra komplement till jaktflyget i svenska Flygvapnet under sin operativa period från andra halvan av 1980-talet och fram till 1999 vid flygflottiljen F10 på Barkåkra utanför Ängelholm.
Skribent Göran Hawée
|
||||||||||||||||||||||||||||||||||||||||||||||