|
|

|
| |
Siktesradar
J35F och J35J
PS01/011A
Notis 2
|
|
|
Allmänt
Jaktflygplanet
J35F
utrustades med en svensk radar PS01A och PS011/A efter en specifikation från
Kungliga Flygförvaltningen KFF. Den utvecklades i huvudsak för
måldatainmätning vid målspaning och till siktesutrustningen för beräkning av
information för optimal inriktning av olika typer av robotvapen samt att ge
referensdata till robotbeväpningen.
Radarutrustningen var en kombinerad Spanings- och
Siktesradar av Puls-typ, därav beteckningen PS.
Den
var en samprodukt av LM Eriksson LME i Mölndal och Svenska
Radioaktiebolaget SRA och KFF i Stockholm. En ingenjör Axel Axelsson vid KFF
flygradarbyrå skulle prägla projektet SAX (Stor-Axel) med sitt namn.
PS-01/011 hade i sin funktion ett intimt samarbete med
Sikte S-7B3/B31.
I versionen
som PS011/A var den anpassad till en
IR-spanare 71N, utvecklad av HAC i USA och licenstillverkad av
LME och Svenska Aeroplan AB SAAB.
Siktesradarns huvuduppgift var att vid anfall med Jaktrobotar
RB27, RB28 och
RB24 ge radarsiktet avstånds- och riktningsinformation till målet för
att kunna utföra beräkningar och ge flygföraren information för styrning av
flygplanet till rätt avfyringspunkt. För detta hade radarn dels ett
Spaningsprogram till hjälp för flygföraren att hitta målet och dels ett
sofistikerat Siktesprogram som flygföraren via radarns MOD-logik kunde styra
till följning på målekot i tre koordinater, avstånd, sida och höjd. Radarn
lämnade också referenssignaler till
Robothjälpapparater (Robotslavningsenheter) som genererade
målutpekning till RB27 och RB28 målsökare samt anpassning av målavstånd och
radarfrekvens till RB27. Flygplanets radar var alltså den osynliga och
nödvändiga länken mellan jaktflygplanet och målet även i moln och i mörker.
Konstruktionen och uppbyggnad.
Radar
PS01/011 var i stort sett gjort på samma sätt som
PS03/A i J35B och J35D (projektet LAX, Lill-Axel) och förvärvade därmed alla
servicefördelar detta innebar. Den hade också influenser från en radar
utvecklad av HAC i USA som satt bland annat i A4 Phantom. PS01/011 hade dock
en sändare med högre uteffekt (därav projektet Stor i SAX) vars frekvens
också kunde förändras av flygföraren under flygning. Den hade även ett mer
sofistikerat avståndsföljesystem, fler störeliminerande funktioner samt
anpassningsfunktioner för robotar och därför avsevärt fler tillkommande
funktionsenheter. Dessa var placerade i flera olika utrymmen ute i
flygplankroppen. Radar PS-01 ingick i B3-systemt i J35F1 och PS-011 i
B31-systemet i J35F2 vilkas alla ingående enheter hade, för att förenkla
identifieringen i system tilldelats speciella nummer vilka uppges i samband
med presentationen av respektive enhet nedan. Enheter ingående i PS-011 hade
dessutom en orange färgmärkning för att särskiljas från PS-01-enheter.
|
|

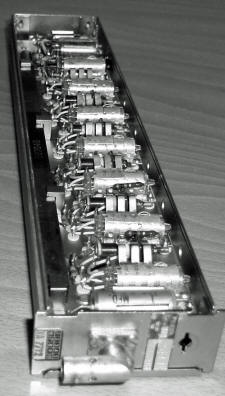
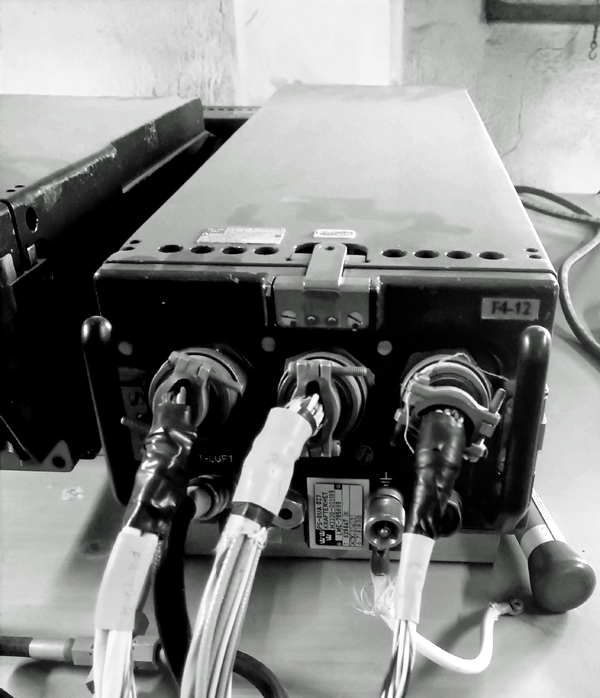
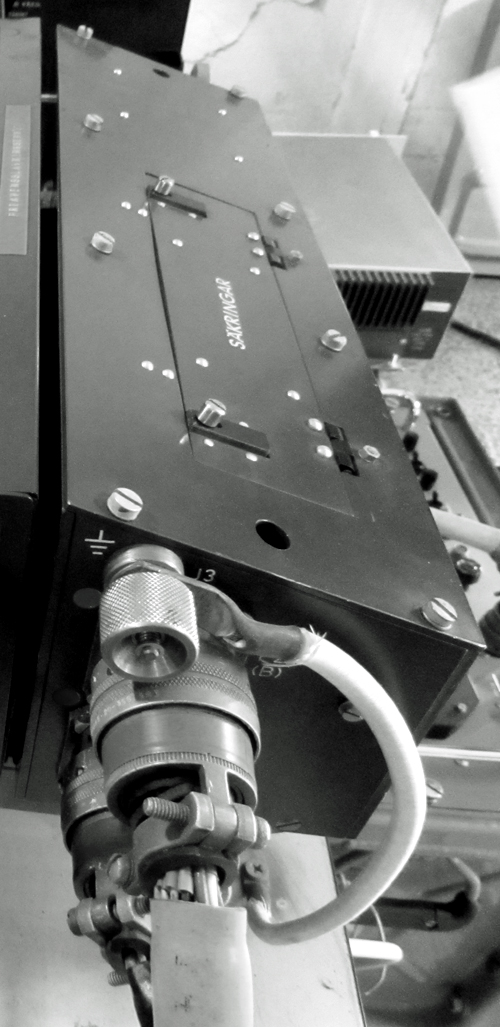
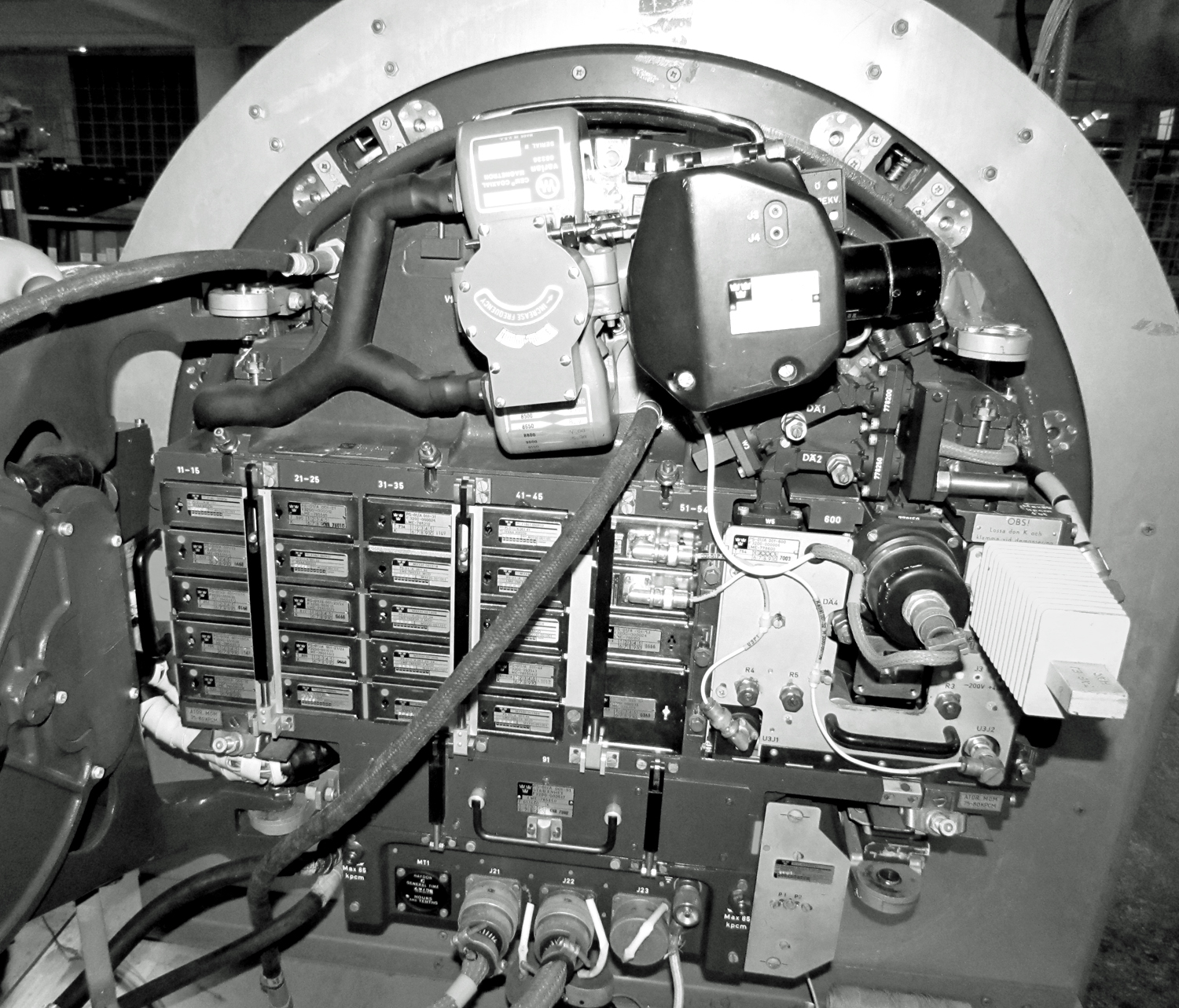
Radarstativet 001-00
Större bild
|
Radarenheterna och dess placering
I
nosutrymmet
Radarstativet 001-00 innefattade Sändare och Mottagare
och var placerad bakom antennen, väl anpassade till utrymmet.
Det
innehöll även ett antal underenheter i två olika storlekar vilka inrymde
Kraftomvandlare och Signalbehandlingsenheter. Stativet innehöll
också ett omfattande kablage för förbindelser mellan underenheterna och ut
mot flygplanets kablage till övriga samarbetande system. Samtliga enheter
anslöts elektriskt till stativets kablage via kontakter av typ ”blue ribbon” vid montering i sina respektive hållare.
|
|

Sändaren 001-100 |
Sändaren 001-100 utgjordes av en Modulator och en
Cellmagnetron med en pulsuteffekt på 200 kW vars frekvens kunde varieras
11000 MHz inom X-bandet. För frekvensanpassning till RB27 målsökare MS kunde
magnetronfrekvensen styras till speciella RB-frekvenser inom ett mindre
band. Sändaren kunde väljas att antingen gå ”TYST” (effekten till konstlast)
eller i ”SÄNDNING” (effekten ut i antennen).
Tryckluft
till hela vågledarsystemet i mottagaren och sändarens modulator
levererades från en reglerventil ifrån flygplanets motor via flygplanets
luftsystem.
|
|

Mottagare 001-600
Mellanfrekvensenheter
001-051 och 052

Stabenhet 001-91 |
Mottagare 001-600 bestod av en Lokaloscillatorn LO med
Blandare BL och Antennväxlare AVXL samt en Effektväxlare EVXL och en
Förförstärkare FF 001-623 avstämd till 30 MHz. LO var en
elektrisk (termiskt) frekvensomställbar reflexklystron styrd av en
Automatiskt Frekvensregleringsenhet AFR 001-624 inom
sändarfrekvensområdet. BL bestod av en klassisk Dubblexer och AVXL
av en Vågledarcirkulator med ett aktivt TR-rör som skydd av
mottagaren vid sändning. EVXL bestod av en mekanisk tvåläges
vågledarväxel för sändareffekt i konstlast eller ut i antennen.
Mellanfrekvensförstärkare MF1 001-51 hade
linjär förstärkning med Automatisk Känslighetsreglering AKR.
Video 1
från MF1 nyttjades för signalbehandling i avstånds- och
antennföljningssystemen.
Mellanfrekvensförstärkare MF2 001-52 hade
linjär LIN- eller logaritmisk LOG förstärkning och Manuell
Känslighetsreglering MKR. Video 2 från MF2 användes endast för
indikatorpresentationen där LOG-funktionen gav presentationsfördelar i moln
eller vid mark/hav inverkan på lägre höjder under cirka 3000 meter.
Stabenhet 001-91 var monterad i nedre delen av stativet och
stabiliserade ett antal likspänningar till elektronrör och transistorer i
berörda underenheter.
Stabilisator 6.4 V 001-92 var monterad under enhet 001-91 och
tillverkade stabiliserade glödspänning till samtliga elektronrör i berörda
enheter
|
|
Signalbehandlings-
enheter 001-00 |
Signalbehandlingsenheter monterade
i stativet var i samma storlek som MF-enheten ovan. De utgjordes av;
-
Nummer
001-11 – 001-15, 001-22 – 001-24, 001-33 – 001-34
samt 001-44 var aktiva i Antennföljningsfunktionen.
-
Nummer
001-32 samt 001-41 – 001-43 var aktiva i
Avståndsföljfunktionen.
-
Nummer
001-31, 001-35 och 001-45 hade gemensam
aktivitet i båda ovan nämnda funktionerna.
-
Nummer
001-21 var styrande vid en inre test.
-
Nummer
001-53 och 001-54 (den senare hade dubbla
storleken) alstrade grundsynkpulser till Sändaren och Avståndssystemet
samt Indikatorsystemet.
-
Nummer
001-25 och 001-99 (den senare hade
specialstorlek) innehöll relälogik som styrde radarns alla arbetsmoder.
|
|
Kylluftskanaler i stativet. |
Kylning av radarstativets enheter
åstadkoms med Reglerad Kylluft från flygplanets miljösystem. En
sensor i radarn avkände temperaturen på luften in till stativet och ställde
in anpassad lufttemperaturen för bästa funktion i radarns elektronik. Den
fördelades i radarstativet i kanaler till enheternas höljen.
|
|

Radarantenn 002
|
Antennen 002 var som i PS-03 i J35B/D
från början av paraboltyp med enkel roterande matare men modifierades från
slutet av 1960-talet till cassegrain-typ med ett bättre sidlobsdiagram och
större förstärkning. Den var frekvensanpassad för X-bandet och hade en
snedställd matare som gav en excentriskt roterande antennlob. Antennens
pekriktning drevs med elektriskt styrda hydraulmotorer.
För siktesberäkningarna avkändes koordinaterna av lägesgivare i en
Resolversignalenhet 002-01 samt hastighetsrörelserna av
Accelerometrar.
|
|
Indikatorenhet 003 |
I förarkabinen
Indikator 003 utgjordes av ett
katodstrålerör av speciellt typ för möjlighet till påverkan av
efterlysningstiden. Det var monterat i den centrala instrumentpanelen under
optiska siktet. Den gav flygföraren i Spaningsmoden en övergripande
bild av radarns rymdtäckning i presentationen B-scop samt visade
Radarsiktets taktiska symboler i målföljningsläget i presentationen
F-scop. Vidare presenterades styrdatainformation från
stridsledningscentralen STRIL 60
via flygplanets Flygdatasystem FD-11
och Datacentralen DC-2 samt
flyglägesinformation från Flyglägesanläggningen FLI-27.
|
|

Avlänkningsförstärkare 030 |
Avlänkningsförstärkare 030 anpassade
spänningarna för X- och Y-avlänkningen till Indikatorenhetens
katodstrålerör. Den var placerad till höger om flygförarens ben i kabinen.
|
|

Handkontroll HK 004 |
Handkontrollen 004 med de taktiska
manöverorganen var från början likt det i
PS-03/A och integrerat med flygmotorns gasreglage. Det
ersattes dock av en Handkontroll HK, monterat till
vänster i kabinen invid gasreglaget och var elektriskt helt
skild från detta.
HK manöverorgan för radarn och IR-spanaren;
-
Reglage för radarantennens position i Sida och Höjd.
-
Reglage för
Strobens (radarns avståndsmarkör) position
i avståndsled.
-
Omkopplare F0-F1-F2 beordrade Modomkoppling i radarns logik.
-
Omkopplare S0-S1 beordrade radareko- eller brusföljning.
-
Omkopplare RR – IR beordrad följning med Radarantenn eller
IR-målsökare.
-
Strömställare RB beordrade vid intryckning inställning av vald
robotfrekvens.
-
Strömställare VAR vid intryckning beordrade svepning av
sändarfrekvensen över radarns hela frekvensband.
-
Potentiometer Manuell Förstärkningsreglering MKR ställde in
amplituden på mottagarvideon till Radarindikatorn.
-
Omkopplare mellan mätområde 40- eller 16 kilometer
|
|

Radarpanel 011
Större bild |
Radarpanelen 011 med nödvändiga
strömställare och reglage för de grundläggande operativa inställningarna var
placerad till vänster i kabinen och något svår att nå under flygning. Där
gjordes initiala inställningar för Radarns och IR-spanarens operativa arbete
beroende på planerad målbild och anfallsgeometrin, dess uppträdande och
omgivning samt även viss testmöjlighet enligt nedan;
-
Val av linjär LIN eller logaritmisk LOG mottagarförstärkning
beroende på flyghöjd och / eller i moln.
-
Val av smalt SMAL eller brett BRED sökprogram i sidled för
antennen, 40 grader respektive 120 grader.
-
Initialt val av Radarns och Roboten RB27-s låsning på målekots
fram- FRAM eller bakkant BAK vid remsstörande mål. I fölningsläget övergick
valet av Radarsiktets beräkning BAK AUT.
-
Val av jittrad JITT Pulsreperterfrekvens PRF slumpmässigt
(brusstyrt) 5-10 %.
-
Reglering av IR-målsökarkänsligheten IR-KÄNSL.
-
Manuell inställning av relativa hastigheten REL-HAST på
Stroben i simulerad S1-mod SIM-DA vid brusstörning.
|
|

Vapenpanel 025
Större bild |
Vapenpanel 025 var placerad till höger i
kabinen och även den lite svårt placerad för åtkomsten av dess
Manöverorgan speciellt under flygning. Därför var dessa utvalda att
användas initialt såsom för igångsättning av radarn, omkopplare RADAR och
IR-spanarens kylning IR-KYLN eller mellan anfallen i olika funktionsmoder
beroende på det fortsatta taktiska uppträdande. Dessa utgjordes av;
-
RADAR
–omkopplaren med lägena;
FRÅN – Radarn helt strömlös.
BER – Radarn i beredskapsläge, endast uppvärmd under minst 180 sekunder från läge FRÅN.
TILL – Radarn startar i mottagningsläge tidigast 30
sekunder från läge BER.
TYST – Radarsändaren startar tidigast 10-12 sekunder från läge
TILL. Sändareffekten matas till Konstlast och mottagaren var då öppen
för eventuell elektronisk störning på sändarfrekvensen.
SÄNDN – Sändareffekten ut till Antennen och mottagaren kan registrera alla reflekterade ekon.
-
Omkopplare för radarantennens referens i höjdplanet –
flygplanfast FLPF TILL eller gyrostabiliserad till horisonten med referens
från FLI 27.
-
Val av sökprogram i höjdled för antennen – två linjers 2 LINJ
eller fyra linjers 4 LINJ.
-
Val IR-kylning inkopplad IR KYLN TILL.
|
|

Fördröjningsrelä 029 |
Fördröjningsrelä 029 var monterat till
vänster i kabinen. Det hade olika tidstillslag för att styra radarns
igångsättande såsom FRÅN – BER i 180 sekunder och BER – TILL 30 i sekunder.
Vid tillbakagång mot läge FRÅN motsvarande tider.
|
|

Elektronomkopplare 028

Elektronomkopplare 031
|
I flygplankroppen
Elektronomkopplare 028 var placerad
mellan flygmotorn och flygplanskalet och försågs med tryckluft i enheten
samt kylluft runt enheten. Den omvandlade, som ovan nämnts alla egna
symboldata, totalt nio (9) stycken från radarns Signalbehandlingssystem
och från Radarsiktets beräkningar till radarns Indikator vid
B-scop eller F-scop. Data kom också från radarantennens
Antennläge och Avståndssvep samt Måldetektering eller
IR-målsökarens dito om IR valts på HK. Övrig information från andra
system som stridsledningsdata kom från markorganisationen STRIL 60
via flygplanets Flygdatasystem och Datacentral samt flygplanläget
från Flyglägesanläggningen.
Elektronomkopplare 031 var även den
placerad mellan flygmotorn och flygplanskalet och försågs med tryckluft i
enheten samt kylluft runt enheten. Den fanns komplement till
Elektronomkopplare 028 ovan och matade information till denna om vissa
antennvinklar och antennlobbredd samt höjdvinkelmarkör.
|
|
Elkraftenhet 027
|
Elkraftenheter 027 var även den placerad
mellan flygmotorn och flygplanskalet och försågs med tryckluft i enheten
samt kylluft runt enheten. Den likriktade inkommande generatorspänning 3x200
V 400 Hz som omformades via olika transformatorer till olika rålikspänningar
för vidare befordran till andra ingående enheter för bland annat
stabilisering i radarns strömförsörjningssystem. Dessa utgjordes bland annat
av Likriktare 023 och Kraftenhet 146 för samt Stabenhet
001-91. De flesta av dessa var även säkrade i enheten. Även en
temperaturövervakare fanns i enheten som kopplade ned radarn vid
övertemperatur.
|
|

Likriktare +400 V 023 |
Likriktare +400 V 023 var även den
placerad mellan flygmotorn och flygplanskalet och försågs med tryckluft i
enheten samt kylluft runt enheten. Den omvandlade spänning 3x200 V 400 Hz
från Elkrafteneheten 027 till likspänning +400 V bland annat specifikt för Mottagare 001-600.
|
|
Kraftenhet 146
|
I flygplanets vänstra AKAN-utrymme /
Ammunitionsfack.
Kraftenhet 146 genererade
referensspänningar för resolvrar och synkron i Antennen 002 och
underenheter i Radarstativet 001-00 samt till Handkontroll 004
och till övriga samarbetande system i flygplanets avionik. I enheten
likriktades också råspänningar till olika stabiliserade likspänningar i
Stabenhet 001-91. De flesta av dessa var även säkrade i enheten.
|
|
Frekvenshållningsenhet 014 |
Frekvenshållningsenhet 014 angav noggrann
styrning från en mekanisk Kavitet till vilken frekvens radarns
Sändare och RB27 Mottagare skulle ställas in.
Den kunde av markpersonalen på order från stridledningen väljas i sex olika
lägen, A, B, C, D, E och F varav F-läget alltid användes som
”fredsläge” och var plomberat. Ett Automatiskt Frekvensreglersystem AFR
styrde sedan sändarens Magnetronfrekvens till vald RB-frekvens. En
liten effekt från denne fördelades till RB-riktkopplarna 153 och 253,
se nedan.
|
|
|
Robotslavningsenheter 005, 006 och
007 angav referenser för radans Antennvinkel samt
Målavståndet och Sändarfrekvensen till RB27/28. Funktionerna, se
nedan.
|
|
RB-riktkopplare 153, 253 |
RB-riktkopplare 153 och 253 fördelade
en liten del av
Sändarfrekvensen till Robotbalk F5 054 för avstämning av hängda
robotar RB27 i de fyra olika balklägena
|
|

Robotbalk F5 054
|
|
|
|
Radarfunktioner
Radarns funktioner kunde uppdelades i
fyra huvuddelar enligt nedan samt anslöts till andra system i flygplanets
Avionik för totalfunktionen. De senast nämnda utgjordes av
Radarsiktet och Datacentralen inklusive Styrindikatorn som
var väl integrerade med radarns avståndsföljesystem samt Flyglägesgivaren
för referens till antennföljesystemet och för flygningen i övrigt.
|
|
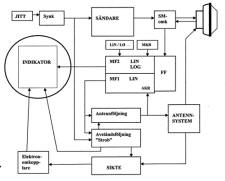
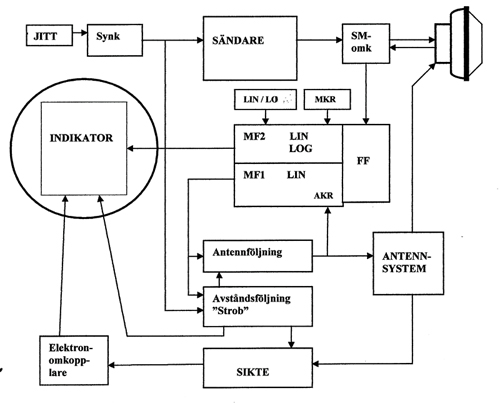
Blockschema PS01/011
Större bild
|
En grundläggande del, som var
förutsättning för dom övriga skulle åstadkomma detekterade ekopulser för
presentation för föraren samt för signalbehandling för andra delfunktioner
och delsystem i B3/31-systemet. Här ingick Sändaren, Antennen,
Mottagaren och Indikator. Funktionen arbetade i stort som en
klassisk radar för målinmätning i tre kordinater. Sändarpulser med hög effekt
sändes ut i en smal, 10 gr bred loob i antennens pekriktning. Efter
reflexion från målet och tillbaka genom antennen samt förstärkning och i
mottagaren presenterades målekots sid- och höjdläge samt dess avstånd genom
uppmätning av pulsgångtiden med ett avståndssvep på radarindikatorn.
Specifikt för PS01/011 var inarbetade funktioner för motverkande av olika
typer av radarstörning samt att ge ledpulser till jaktrobot RB27 målsökare.
|
|
|
En andra delfunktion bestod av ett
avancerat Signalbehandlingssystem för att åstadkomma automatisk
målföljning i de tre kordinaterna avstånd, sida och höjd. Dessa faktorer var
nödvändiga för att beväpningssystemets Siktet S-7B3/31 skulle
kunna verka optimalt.
|
|
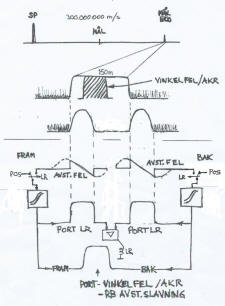
Avståndsföljning Princip.
Större bild.
|
Avståndsföljesystemet
Avståndsföljesystemet bestämde vilket
måleko som radarn skulle följa på samt var en förutsättning för
antennföljefunktionen. Det var relativt enkelt men ändå så sofistikerad att
funktionen kunde göra urval på målekots fram- eller bakkant. Följningen
uppnåddes med att radarns avståndsmarkör, Stroben kunde ”låsa” fast och
följa på någon av målekots kanter. För styrningen av systemet nyttjades en
klassisk systemlösning med två elektriska integratorer i serie varvid
utsignalen från andra integratorn, det vill säga målavståndet återmatades
till Strobens lägesstyrningen för att sluta reglerloopen i systemet.
Konstruktionen definierade även målaccelerationer som begränsades för att
hindra målföljning på orimliga målrörelser samt närmandehastigheten till
målet, viktig för beräkningar i radarsiktet. FRAM / BAK-kantföljningen var
en viktig funktion när vilseledande Remsstörning (windows), i stråk eller
buntar fälldes bakom målet.
|
|
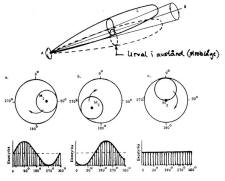
Antennföljning Princip
Större bild
|
Antennföljesystemet var också relativt avancerat och synnerligen
effektiv och gav goda målrörelsedata. Målekosignalen utvanns ur strobluckan
enligt ovan och var, oavsett vilken fram- eller bakkant som stroben följde
på, orienterad till mitten på målekot och vars storlek reglerades till
användbar nivå av AKR-systemet. Genom antennens lobrotation och
AKR-systemets relativt långa tidskonstant erhölls en ekoamplitudmodulation (anvelop)
med ett unikt fasläge som bestämdes av antennens avvikelse åt något håll
från lobrotationens centrum. Ur felsignalens modulation utvärderades sid- och
höjdfelet i speciella portar refererade från antennmatarens position i
varvet. Portarna utgjordes av multivibratorer vilka triggades av pulser från
fyra avkänningsspolar, två för vardera höjd respektive sida och en magnet på
antennens matare som roterade förbi spolarna.
Följningen
i sid- och höjdkanal styrdes även här av två IG i serie varav den första var
elektronisk medan den andra utgjordes av hydraulmotorerna i respektive
kanaler. De definierade målaccelerationer utnyttjades även här för
begränsning av antennföljning på orimliga målrörelser.
|
|

PS01 Modschema
Större bild |
En tredje delfunktion utgjordes av ett
Manöverlogiksystem för manuella och automatiska inställningar och
omkopplingar av skeden som ombesörjde att radarn arbetade i olika Moder.
För att åskådliggöra samansättningen av
dessa olika Moder skapades ett Mod-schema vilket visade hur
radarn arbetade i stationära Moder med olika förkortade benämningar.
Mellan blocken visade övergångspilar med inlagd text om villkoren som styrde
olika förändringar. Dessa utfördes nästan uteslutande från Handkontrollen
HK 004 med Omkopplare F0-F1-F2 och vid Brusstörning S0-S1
samt vid IR-målsökarföljning RR-IR. Endast villkoret Låsrelä LR
från radarns följelogik var undantag. Vidare fanns det två
Tidsbegränsade Moder.
Anm. DA = Direktanfall, HK =
Hundkurveanfall.
Det ena tidsbegränsande tillståndet
initierades från Moden SPANING via order F1 på HK till
gyrostabiliserad Mod STABB, där antennen riktats till bästa Måleko
och sedan efter order F0 på HK automatiskt när Stroben
manövrerats till Målekot. När dessa sammanföll växlade radarns LR
växlade läge och efter 2 sekunder var DA-beräkning klar i
Radarsiktet och den stationära Moden DA-S0 permanentades. Detta
var normalfallet för optimal siktesberäkning av skjutfallet DA vid följning
på ett Måleko. Vid Målekobortfall inträdde Moden
DA-Minne med Stroben som målreferens i minnesgång i 3 sekunder och
förflyttning på ”död räkning”. Återkom Målekot inom antennloben efter
3 sekunder återfördes Stroben till Målekot med order F1 -
F0 från HT till Moden HT-Minne (hastighetstillskott) och
när LR drog inträdde Moden DA-S0 återigen efter 1 sekund.
Det andra tidsbegränsande tillståndet uppkom också från
Moden SPANING och efter att antennföljning först etablerats på en
Brusstörning med order F1-F0 och S1 på HK till
Moden HK-S1. Med order F1-F0 igen på HK startade den
tidsbegränsade moden i 2 sekunder till fortsatt antennföljning på störningen
och avståndsföljning i minnesgång med Stroben som referens och med
justerbar Relativ Hastighet RE HAST från Radarpanelen till
Moden SIM-DA.
Övriga Moder vid Brusstörning efter etablerad
följning på Måleko var dels en automatisk aktiverad Mod Störlarm
SL benämnd DA-SL (hade tveksam funktion) och dels en från moderna
DA-S0 eller DA-Minne med order S1 på HK till Mod DA-S1.
I båda dessa Moder hade avståndssystemet minnesgång och antennen
följde på brusstörningen.
Anm. I de Moder som har fet ram kunde
robotarna avfyras dock med olika inriktningskvalitet. Bästa läget var DA-S0
där Radarsiktet har bästa indata. I övriga moder där avståndssystemet
var i minnesgång och manuell styrning av REL HAST var handhavandet av dessa
viktigt för bra inriktningskvalitet.
|
|
Indikatorbild Spaning (B-scop)
|
Spaningsfunktionen
Grundreferenser till flygplanets omvärld
utgjordes av en Konsthorisonten KH 1 från
Flyglägesinstrumenten FLI och en i rastret Nollreferens 2 för flygplanet.
Från Stridsledningscentralen STRIL via Flygdatasystemet
i flygplanet visads här en Datalänkcirkel DCL 3 cirka 40
grader i sida och 10 kilometer i avstånd samt Datalänk målhöjd DLH 4
4 grader upp refererad till horisontplanet.
Antennens avsökning var horisontrefererat
i rollplanet och styrdes av ett sökprogram med en totala sid- och
höjdteckning på 120 grader eller 40 grader i sida och 60 grader i höjd. Med
valet flygplanfast FLPF TILL på Vapenpanelen blev referensen flygplanets
nosriktning, i annat fall horisonten som referens. Antennens sidläge 6
avläsas på SB läge, se nedan, här Smalt 40 grader refererat från
HK och höjdläget på Antennvinkel höjd AVH markör 5 visar 4
-6 grader upp. Programmet svepte i två- (PS01) eller fyra- (PS011) linjer
som gav 12-14 gr höjdtäckning.
Målekona presenterades på
Radarindikator typ B-scop i ett vertikalt så kallat Spinnband
SB 7 med antennlobbredd på 10 grader. Där presenterade
nolleko (sändarpulsen), mark- och höjdekon samt alla Målekon inom 40
eller 16 kilometers avstånd som föll inom antennloben samt Stroben 9,
radarns avståndsmarkör med referens från HK.
En Sidvinkelmarkör SVM 8
visade HK läge i sidled.
Ett Raster 10 visade radarns mätområde i
avstånd 0-40 (eller 0-16) kilometer samt totala sidvinkeln 120 grader och
ett Raster 11 för antennvinkel i höjd plus / minus 30 grader.
|
|
Indikatorbild Siktning
|
Siktningsfunktionen
Då radarn skulle lämna målavståndsuppgift
till Radarsiktet beordrades den i ett 10 graders fast roterande
siktesprogram styrt från HK samt avståndsföljning på målekot. På
Radarindikatorn presenterades efter mållåsning typ F-scop
de
nödvändiga styrmedlen för anfallet. Styrsymbolernas huvudaktörer bestod av
en Styrcirkel SC 19 och Referenscirkel RC 20 som
ingick i funktionen Styrpresentation SP. De visade inriktningsfelet i
sida och höjd till avfyringspunkten mot målet med RC och indikatorns
mittpunkt som nollreferens samt en Tidscirkel TC 17 vars
storlek angav tiden kvar till avfyringspunkten till målet. TC började minska
vid 30 sekunder kvar till denna. . RC presenterade även en i
Radarsiktet framräknad tidpunkt med villkoret HISS, när ett eventuellt
höjdfel skulle styras ut och minskade då till halva storleken
En annan symbol viktig för anflygningen
mot målet var siktets framräknade Anflygningsvinkel AV 16
som visade målets flygriktning mot jakten, i detta fall 140 grader med
indikatorns mittpunkt som referens samt målhastigheten på dess längd till
samma punkt, i detta fall 450 meter / sekund.
Ytterligare en symbol, en lucka i TC som
med sin position visade Relativa hastigheten RH 18 till
målet enligt klockmetoden med 0 meter / sekund klockan 12 och 300 meter /
sekund klockan 3 och så vidare. Där emellan Punktmarkeringar 21
i rastret för varje 100 meter / sekund.
I detta fall visas klockan 7 som blir 700 meter /
sekund.
Den fjärde delfunktionen utgjordes av ett
för ändamålet konstruerat Robotslavningssystem för anpassning av
inmätta måldata till berörda robotar. Detta avsåg Målutpekning till
RB27 och RB28 samt Radarfrekvens och Målavstånd till RB27.
Detta ombesörjdes, som tidigare nämnts ovan av därför speciella enheter
med referenser från radar PS01/011 Antenn-, Sändare- och Avståndssystem.
Tekniska data PS-01/A.
Sändaren: Pulsuteffekt 200 kW,
frekvensband cirka 9150-9300 MHz., manuellt reglerbart eller med AFR-system
till sex (6) fasta frekvenser fördelade mellan alla flygplan vid ofred. Pulslängd 0,5
mikrosekunder, pulsrepeterfrekvensen PRF cirka 2400 Hz. PRF regelbunden
eller oregelbunden (jittrad) +/- 5 % vid val JITT på Radarpanelen.
Antennsystem:
Lobbredd 4.5 grader, snedställd matare 2,5 grader, cross over-djup 2 dB,
matarrotation 80 varv / sekund,
förstärkning 27 dB (ca 800 ggr) i huvudloben.
Spaningsprogram +/- 60 grader i sida, +/- 30 grader i höjd, gyrohorisont-
eller flygplanrefererat. Siktningsprogram 9-10 grader och målföljande.
Mottagaren: Balanserad blandare, LO
avstämbar inom 500 MHz, Mottagarens totala förstärkning, FF + MF >115 dB (>100 miljarder ggr).
Indikator:
Presentationerna B- scop i Spaningsmoden eller
F-skop
i taktiska Siktningsmoden samt 40 / 16 kilometers valbara mätområden.
Omställbar efterlysningstid.
Signalbehandling: Avståndsföljning inom
0,2 –30 kilometer, fram- eller bakkantsföljning på målekot. Antennföljning
möjlig på brusstörning.
Räckvidd: Målupptäckt på cirka 29
kilometer och målföljning vid cirka 24 kilometer vid 1 kvadratmeters
ekvivalent radarmålarea.
Kraftförsörjning: Växelspänning tre faser
200/115 Volt, 400 Hz. Likspänning +28 V.
|
|
|
Underhåll
I flygplanet på Division / Kompani,
benämnd A-nivå utfördes Funktionsprov, Enhetsbyten och vissa Övrig
reparationer.
På enheter vid Flottiljverkstad, benämnd
B-nivå utfördes Enhetstillsyner och Modifieringar samt omfattande
Reparationer till detaljnivå.
På enheter vid Central verkstad CVA,
benämnd C-nivå utfördes Översyner och Modifieringar samt omfattande
Reparationer till detaljnivå
Provningsenheter i Servicebuss 405F
I denna fanns samlad all serviceutrustning för
flygplanets hel Avionik. De mest använda vid flottilj för service av
PS-01011 funktioner var en Snabbtestlåda, en Ekosimulator, en
Målsimulator, en Radarprovare
PS-01 och en Grovfelssökare PS-01. |
|

Snabbtestlåda

Ekosimulator

Målsimulator.

Radarprovare PS-01/A.

Grovfelsökare PS-01/A |
Snabbtestlåda
Snabbtestlåda anslöts med eget kablage till avsedda
testuttag i förarkabinen och var en kombinerad testutrustning för radarn och
radarsiktet. Den hade många testutbud med indikeringslampor för information
om olika tillstånd i utrustningarnas system, strömställare för generering av
olika stimuli och indikeringar på ett mätinstrument. Avsikten var att på ett
snabbt sätt få grepp om ett i första hand säkringsfel men även andra
felutfall som snabbt kunde avhjälpas utan större åtgärder i övrigt.
Ekosimulator
Ekosimulatorn var en apparat med vars hjälp man kunde simulera ett
eko in i radarantennen på sändarens frekvens när sändaren gick i konstlast.
Simulatorn synkas med radarns pulsreperterfrekvens PRF. Denne kan fördröjas
i olika grad och olika målavstånd kan då simuleras. Det senare åstadkoms i
Målsimulator PS-01/A nedan.
Genom förflyttning kan även antennföljningen
kontrolleras.
Målsimulator.
Målsimulator genererade en målsvarspuls med vilken man
kunde styra signalgeneratorer för test av radarns mottagar- och följesystem.
Den kunde styra målsvarspulserna till fasta eller rörliga i avstånd, vid
behov kombinerat med olika valbara närmande eller fjärmande hastigheter och
positiva eller negativa accelerationer. Härvid gavs bra förutsättningar för
kontroll av radarns avståndsföljeprestanda i alla delar.
Radarprovare PS-01/A.
Radarprovare PS-011/A anslöts till radarns antenn-
eller apparatenhet i avsedda uttag för test och var en utrustning enbart för
radarn. För apparatenhetens del kunde i olika omkopplarlägen många
logikomslag där reläer var aktiva avläsas på lampor, olika pulser kunde ses
på ett oscilloskop och även lik- och växelspänningar avläsas på ett
instrument eller inbyggt oscilloskop.
Grovfelsökare PS-01/A.
Grovfelsökarens uppgift var att kontrollera
svarssignaler från en hel del systemfunktioner i radarn efter inmatade
stimuli till dessa. Detta kunde ske stegvis automatiskt efter ett program
eller manuellt. Eventuellt avvikande utsignaler från fastställda prestanda
presenterades på sifferindikator och ett antal lampor som vägledde, efter
kontroll i facit till att fel förelåg i någon av två underenheter i radarn.
|
|

Signalgenerator |
Signalgenerator.
Signalgeneratorns frekvensområde täckte hela X-bandet
och var mycket noggrann avseende frekvens och utsignalsnivå.
Den användes i första hand att kontrollera känsligheten
på radarns mottagare vilket i hög grad inverkade på dennes
räckviddsprestanda. Signalen matades direkt in i mataringången i antennen
varvid även hela vågledarsystemet kontrollerades.
|
|
|
Källa
Beskrivning Siktesradar PS-01/011A
Speciell Förarinstruktion J35F, Handhavande
och
Beskrivning.
Beskrivning
Servicebuss 405F/J
Beskrivning för provningsapparater
Senast uppdaterad 2026-03-20.
|
{kind=link}
{kind=link}