|
|
|
Flygburna
övningsmotmedel för FV jaktradarsystem
Av Göran Hawée
En redogörelse för mina upplevelser, intryck och betydelsen av de Övningsmotmedel som togs fram för FV identifierings- och handhavandeträning vid elektronisk störning mot jaktflygradar under realistiska övningsförhållanden.
I min tjänst som telemontör, verkmästare och flygplaningenjör vid F16 Televerkstad och Kontrollavdelning (efter 1977 Teknikavdelning) kom jag att konfronteras med de Övningsmotmedel för elektronisk störning som togs fram under perioden 1965 till 1985 för att verka mot flygradar i flygplan J35 Draken och JA37 Viggen. Radarstationerna i fråga var PS-02 i J35A, PS-03 i J35B/D, PS-01/011 i J35F1/F2 och PS46 i JA37. Syftet med utrustningen var i första hand att flygföraren i sin roll som radaroperatör i respektive flygplanstyp och version skulle ges tillfälle att kunna öva sig i att med hjälp av radarn identifiera olika elektroniska störformer samt öva sig att styra radarns olika möjligheter till målföljning mot det tänkta elektroniska störhotet i en fientlig taktisk situation. Den gav även möjlighet att i J35F med Övningsrobot ÖRB27 WESEM (Falcon) och med Utbildningsregistrering UTB i JA37 utvärdera vapenverkan av jaktrobotsystemen i elektronisk störd miljö.
INNEHÅLL Maskerande brusstörning från SUNE Vilseledande pulsstörning från SUNE Maskerande störning på radarfrekvens Vilseledande repeterstörning med radarpulsreferens Vilseledande vinkelstörning med kopierad radarantennens spinnfrekvens Flygplan J35F 1 med PS-01 och J35F2 med PS-011 Störutbildningen på PS-01/011 vid FV divisioner Maskerande störningar från PETRUS Vilseledande Repeterstörning från PETRUS Vilseledande vinkelstörning från PETRUS Maskerande störning på radarfrekvens Vilseledande repeterstörning med radarpulsreferens Störutbildningen på PS-46 vid FV divisioner Övningsstörutrustningarnas fördelar och nackdelar i fredstid
Störkapsel SUNEMin första kontakt med en dylik störutrustning var under andra halvan av 1960-talet när flygavdelningen vid F16 genomförde övningar med en störningskonstruktion benämnd SUNE som tagits fram vid Försökscentralen FC. Den kunde monteras på en RB24-balk samt strömförsörjas och manövreras med hjälp av RB24-installationen i det flygplan som den medfördes på.
Bilden visar Sune monterad i balk på A32 nr 160 vid FC
Utrustningens elektronik och antenner var inneslutet i en kapsel med radomer bak och fram och var runtomstörande.
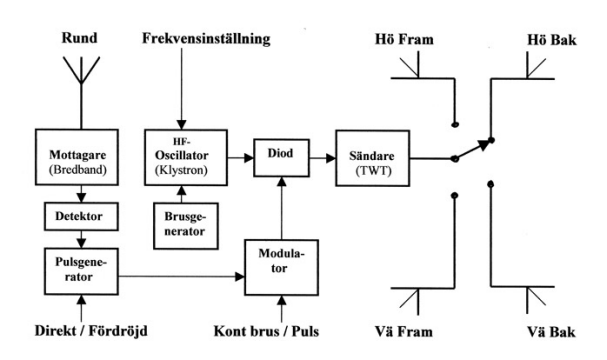
SUNE var manövermässigt enkel i sitt utförande vilket medförde att dess sändares frekvens och olika störformer måste inställas av markpersonal. Den hade en mottagare för registrering av flygradarpulser. Sändarens uteffekt var 20W och två störningstyper fanns att välja på. Den ena utgjordes av Maskerande störning i form av Kontinuerligt Brus, den andra av Vilseledande Repeterstörning i form av ett förstorat eko som kunde uppträda omedelbart när radarpulsen togs emot med en viss intern minimal fördröjning, s.k. initialfördröjning på 0,2 - 0,3 microsek samt förflyttas i avståndsled, så kallad avhakning mot längre avstånd. Någon antennföljningspåverkande störform fanns inte.
Bilden visar Blockschema på Sune.
F16 opererade vid denna tid med J35A. Detta Drakenflygplan var för jaktuppdrag utrustad med jaktrobotar av typ RB24B och 30 mm automatkanoner AKAN. Som hjälp vid inriktning hade det ett gyrobaserat dag- och mörkersikte S-6B samt en siktesradar PS-02 för noggrann målinmätning i avståndsled till siktet och avstånds- sid- och höjdinformation till föraren/operatören på radarindikatorn. De elektroniska störningarna från SUNE mot PS-02 hade inverkan på siktets målavståndsberäkningar vilket återspeglade sig på inriktningsnoggrannheten för robotens och AKAN-projektilernas möjlighet att nå sitt mål.
Radar PS-02 var enkel och hade endast två arbetsmoder, ett Spaningsprogram och ett Siktningsprogram, det senare tillika avståndsföljningsprogram. PS-02 sändarfrekvens kunde varieras manuellt av markpersonal över en del av X-bandet (9-10 GHz). Alla PS-02 sändare var fredsmässigt inställda på samma frekvens efter direktiv av Radarbyrån vid dåvarande Kungliga Flygförvaltningen KFF. Därför kom vi på verkstaden att tillfrågas om denna frekvens så att SUNE:s sändare kunde ställas in rätt. I en krigssituation avsågs att sprida PS02 sändarfrekvenser till ytterligare fem olika inställningar jämt fördelade över flygplanparken. En automatisk störinhiberande funktion, s.k. jittrad eller oregelbunden pulsrepeterfrekvens PRF, som var verksam mot så kallad ”spofing” (falskeko ”andra gången om” nästa sändarpuls) kunde väljas och på order från stridsledning inkopplas av markpersonal.
Vilka problem eller annat som uppkom vid flygningarna med J35A och PS-02 mot SUNE fick vi tekniker på förbandet ingen officiell kännedom om men genom mina goda kontakter med flygförare i allmänhet, vilka grundade sig på ett gott samarbete vid utrönande av tekniska funktionsfrågor på PS-02, S-6B och RB24B fick jag klart för mig en hel del och kunde bidra med tekniska förklaringar till olika systembeteenden på funktions- och konstruktionsbasis vilket i viss mån även ledde till senare förbättringar.
I sammanställningen nedan av störningarnas inverkan på beväpningssystemet har klassificeringen av sannolikhet för vapenverkan gjorts med värdeuttrycken Mycket God MyG (>90 %), God G (90-60 %), Mindre God MiG (60-30 %), Liten L (30-0 %) och Ingen (0 %) vilka användes vid bedömning av jaktrobotar under dess operativa tid i FV.
Utvärdering av träffsannolikheterna utfördes enbart med hjälp av flygförarnas uppfattning eller eventuella visuellfilmning genom optiska siktet.
Enligt radaroperatörerna i J35A framkom nedanstående problem vid ”störveckorna” eller vid andra mer realistiska övningar där elektronisk störning ingick. Jag har valt att dela upp redovisningen av funktionerna i den ordning de kommer in och är verksamma under ett anfall, först Siktesradarn sedan Siktet och sist bedömningen av Vapenverkan.
Men först några tillrättalägganden och förklaringar avseende Radar och Siktets funktioner samt övrigt att iakttaga vid genomgången av beväpningssystemets olika delar under anfall mot störande mål med SUNE-kapsel aktiverad: Anm 1. Radarns antenn var flygplanfast och riktades med flygplanmanöver. Den roterade och spanade i spiralt program ut till 60 gr och in till 6 gr vid val SPAN eller enbart 6 gr vid val SIKT. Avståndsmarkören Am (stroben) kunde låsa på målekot med relativt hög förstärkning i SIKT och lämna avståndsinformation till Siktets Skjutgränsberäknare för RB24 eller dess AKAN-siktesberäkning. Anm 2. Nedan redovisas J35A hela beväpningssystems beteende och inverkan avstörkapsel SUNE vid anfall med RB24B och AKAN. Anm 3. Anfallstyp för RB24 var Kurvanfall KA med efterföljande Hundkurveanfall HK och för AKAN Jaktkurva JK. Anm 4. Flygplanets Radar och Störsändaren/sändning betecknas Rr och Ss.
Maskerande brusstörning från SUNE Brusstörsändningen dolde målekot effektivt ned till målavstånd ca 1 km.
RB24-anfall. Siktesradarn: Rr kunde inte avståndsfölja på måleko. Störningen gav dock möjlighet att inrikta RB24 målsökare, som var arreterad i radarantennens mekaniska längdriktning genom att manuellt styra flygplanet med hjälp av presentationen på radarindikatorn i radarns Siktningsprogram. En omständlig procedur som dels krävde finkänslig hantering av radarmottagarens Manuella KänslighetsReglering MKR och dels genom att Rr även ”avståndslåste” på störbruset, en ofullständighet i radarn vilket nästan omöjliggjorde respons från MKR. ”Låsningstillståndet” kunde hävas genom val av Spaningsprogrammet men detta begränsade noggrannheten i inriktningen och MKR-reglagets ”omöjliga” placering på PS-02 Manöverenhet nere till höger i kabinen uteslöt nästan helt denna metod.
Siktet: Skjutgränsberäkning för RB24 uteblev helt på grund av ingen avståndssignal från Rr och målavståndet på Rr-indikatorn doldes av Ss. RB24 fick avfyras godtyckligt efter tumregel för de mekaniska skjutgränserna när dess målsökare angav signal från målet.
Vapenverkan: Bedömdes som MyG – L beroende på om avfyring sker inom eller utom skjutgränserna och när IR-ton fanns till föraren från RB24 målsökare, i annat fall som I.
AKAN-anfall Siktesradarn: Rr kunde avståndsfölja på genombrännande radarmåleko under 1 km. Dock krävdes nedjustering av Rr-s MKR på samma sätt som vid RB24-anfall samt växling av antennprogram fram och tillbaka. Placeringen av MKR gjorde även här det svårt i en taktisk situation.
Siktet; Kunde beräkna för normal AKAN-inriktning inom skjutområde 750-250 m. Vid utebliven radarmålföljning beräknade det för fast 500 m skjutavstånd.
Vapenverkan; Bedömdes som MyG, förutsatt radarföljning på målekot. Med fingerat ”målavstånd” 500m (ej låst radar) bedömdes den som G – L.
Vilseledande pulsstörning från SUNE.Pulsstörsändningen försvårade handhavandet på grund av flera ”falska” radarekon in i Rr.
RB24- och AKAN-anfall Siktesradarn: Rr kunde överlåsa på annat radareko än måleko. Vid RB-24-anfall och med noggrann uppföljning på radarindikatorn kunde dock enkelt ”målskifte” ske med befintliga knappar ”IN” eller ”UT” på Radargreppet. Vid AKAN-anfall var operatören ovetande om radarn överlåste till falskt radareko eftersom han följde målet visuellt via siktet och radarns ”Låslampa” strax under siktet slocknade inte.
Siktet: Skjutgränsberäkning för RB24B blev marginellt felaktig. Även JK-beräkningen för AKAN-siktningen blev nästan helt felaktig.
Vapenverkan Bedömdes som MyG – G för RB24 och som MiG – I vid AKAN beroende på avståndsfelets storlek.
BonuseffektEn bonuseffekt av flygningarna med J35A mot SUNE medförde att tekniska begränsningar och typbundna ofullständigheter hos PS-02 definierades samt att förslag till åtgärd tidigt framfördes till Chefen för Flygvapnet CFV. Denne gav omgående KFF i uppdrag att utfärda ändringsunderlag och beordra införande av åtgärder för att förenkla handhavande av PS-02 vid brusstörning. Resultatet blev att KFF under 1967 utgav tre Teknisk Order Materieländring TOMÄ för ändring i systemet så att en bortkopplingsknapp för avståndslåsningen infördes på och MKR flyttades till Radargreppet RG. Detta blev ett bra lyft för PS-02 och ökade därmed sannolikheten för vapenverkan.
Hur PS-03 och PS-01och PS-011 reagerade mot SUNE får sin förklaring vid studie av hur de reagerade och hanterades mot nästa generation övningsstörkapsel PETRUS, som även innehade SUNE-s störformer, se nedan.
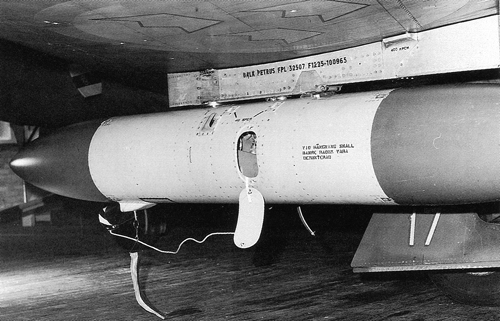
Störkapsel PETRUS
Bilden visar Petrus monterad i balk på J32B
Min andra kontakt med Övningsmotmedel var under andra halvan av 1970-talet när flygavdelningen vid F16 började genomföra flygningar mot en störningskonstruktion benämnd PETRUS som tagits fram vid Ericsson ERE i Mölndal på uppdrag av FMV:FlygEL6. PETRUS kunde monteras på J32E samt strömförsörjdes från flygplaninstallationen och manövreras från en Manöverenhet i flygplanets baksits. Utrustningens elektronik och antenner var inneslutet i en kapsel med radomer bak och fram och var runtomstörande.
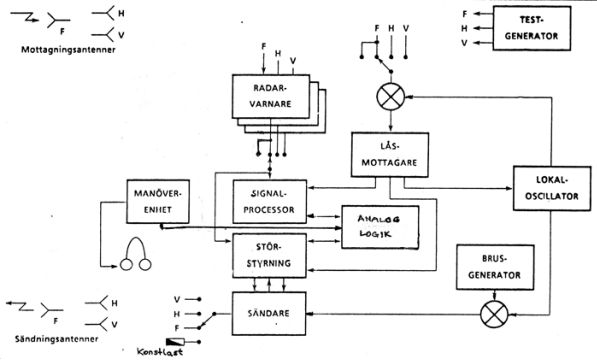
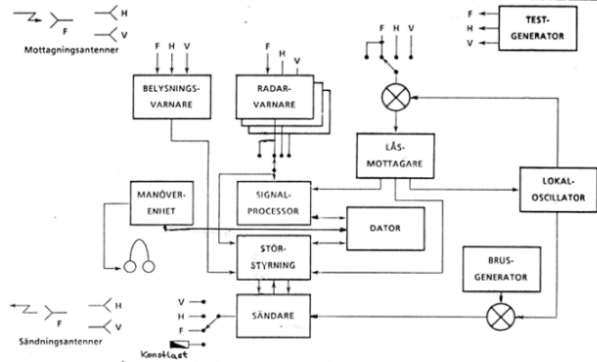
Bilden visar blockschema på Petrus
PETRUS var manövermässigt mer omständlig och sofistikerad i sitt utförande än SUNE vilket medförde att dess sändares frekvens och olika störformer automatiskt eller manuellt kunde inställas av en operatör. Den hade en mottagare för radarvarning samt en låsmottagare för avstämning av störsändaren och registrering av radarpulser för utvärdering av radartyp. Sändarens uteffekt var 200W och två huvudstörningstyper fanns även här att välja på. Den ena utgjordes av Maskerande störning, Kontinuerligt eller Intermittent Brus med variabel bandbredd. Den andra bestod av dels Vilseledande Repeterstörning i form av Förstorat(ade) eko(n) omedelbart när radarpulsen togs emot med en viss initialfördröjning på 0.1 microsek samt kunde förflyttas med olika accelerationer i avståndsled, s.k. avhakning mot lägre eller kortare avstånd och dels två typer av antennföljningspåverkande Vinkelstörformer, s.k. spinnstörning.
För att berörd personal (flygförare, PETRUS-operatörer, övningsledare och ev tekniker) enkelt skulle kunna identifiera de enskilda och kombinerade störtyperna skapades förkortningar enl nedan: Anm. Flygplanets Radar- och Stör- sändaren/sändning betecknas fortsättningsvis Rr och Ss genom hela detta dokument.
Maskerande störning på radarfrekvens.
Vilseledande repeterstörning med radarpulsreferens.
Vilseledande vinkelstörning med kopierad radarantennens spinnfrekvens.
Flygplan J35F1 med PS-01 och J35F2 med PS-011.F16 opererade vid denna tid med J35F1. Denna version av Draken var för jaktuppdrag utrustad med jaktrobotar RB27 och RB28 Falcon och med RB24B som sekundärt alternativ (efter 1981 RB24J som alternativ till RB28) samt automatkanon AKAN. Som hjälp vid inriktning hade det ett till flygradarn integrerat radarsikte S-7B3 samt en väl utvecklad siktesradar PS-01 för målinmätning i tre kordinater, avstånd, sida och höjd. Radarvarianten PS-011 var tillsammans med radarsikte S-7B31 anpassad till IR-spanare 71N i J35F2. Specifikt för denna F-version var att s k ”blandad” målföljning kunde etableras på målet, varvid radarantennen var slavad till IR-spanarens målsökare, när denne vinkelföljde på målets värmestrålning samtidigt som radarn avståndsföljde på målekot. Härvid påverkades inte systemet av vinkelpåverkande radarstörning. I övrigt var PS-011 radarfunktioner identiska med PS-01 förutom att dess följeport vid beordrad. Brusföljning var 266 microsek lång och täckte hela avståndsområdet medan den för PS-01 var 3 microsek och orienterad till Avståndsmarkören Am (stroben).
PS-01 och PS-011 hade på grund av integrationen även stor inverkan på radarsiktets beräkningar för styr- och tidsinformation i Direktanfallet DA och därmed även i slutändan också på robotarnas prepareringar före avfyring och möjlighet att nå sina mål.
Radarn var ganska komplicerad och hade manöverlogik upp till sju stationära arbetsmoder och därutöver några övergångsmoder. Logiken beskrevs i ett för all berörd personal (förare och tekniker) gemensamt ”modschema” där moderna hade symboliska beteckningar för att lätt kunna identifieras i den taktiska situationen samt vid samtal mellan förare och teknisk personal. Radarns sändarfrekvens kunde varieras manuellt av operatören över hela X-bandet men beordras till en fast kavitetsfrekvens för anpassning till RB27 målsökare 10 sek före avfyring. Alla sändare styrdes under fredstid till samma kavitetsfrekvens ”F” efter direktiv av CFV krigsplan. För att i en krigssituation försvåra störning mot PS01 och förhindra påverkan av varandras system vid radaranfall mot gemensamt mål kunde ytterligare fem (A – E) kavitetsfrekvenser fördelas över flygplanparken. Även Radarns PRF, som vid RB27-val krävde stor noggrann regelbundenhet för dess avståndsföljesystem kunde av samma skäl väljas i fyra olika frekvenser. Samma förhållande gällde även radarantennernas spinnfrekvens som mekaniskt redan i fredstid var fördelade i fyra olika fasta varvtal över antennparken. Automatiska störinhiberande faciliteter som fanns inbyggda i PS01 var i huvudsak verksamma mot olika typer av remsstörningar. Mot elektronisk störning fanns endast manuellt valbara, tillfälliga eller varaktiga arbetsmoder. Dessa redovisas närmare under avsnitten nedan vid de respektive störtyper som konfronterade radarn. Generellt gällde dock att modval JITT, d v s jittrad PRF diffuserade alla falska ”radarekon” på kortare avstånd än målekot på radarindikatorn och eliminerade låsning på dessa, störformen kontinuerligt brus undantaget. Ett annat undantag var vid RB27-val då regelbunden PRF automatiskt kopplades in 10 sek före avfyring från radarsikte. Radarsiktet beräknade och presenterade styrinformation och avfyringstidpunkt för DA när RB27 eller RB28 valts samt för HK när RB24 valts Här bör också nämnas det stöd som föraren hade av flygplanets Styrautomat SA. Med dess STYR-funktion (autopilot) inkopplad kunde flygföraren med SA styrreglage enklare manövrera flygplanet, avlastas från manuell flygning och kunde lägga mer tid på sin operatörsroll.
Störutbildningen på PS-01/011 vid FV divisioner.En störutbildningsperiod vid en J35-division varade, under senare delen av 1970-talet oftast en vecka. Den genomfördes mot J32E med störkapslar PETRUS. Även remsfällning från Fällare BOX 3 förekom, dock mer restriktivt emedan det kunde påverka den civila radartrafiken negativt. Flygplanen, två J32E med en till två reservflygplan samt personalen, förare och operatörer ur målflygdivisionen var under tiden ombaserade till den övande divisionens förband. Vid denna tid berördes 17 jaktdivisioner (13 J35F och 4 J35D) i FV av utbildningen eller uppdateringen beroende på förarstatus. Beroende på målflygdivisonens tillgång på J32E och personal för flygning och service kunde jaktförarna beredas störflygningar 2-4 veckor om året.
En ”störvecka” var intensiv och J35F-förare som berördes hade, innan flygningarna mot J32E började uppdaterat sig i radarhanteringen i Simulator SUL J35F i vars taktiska systemdel mer eller mindre verklighetslika radarstörformer kunde simuleras. Även den tekniska statusen i de J35F som skulle användas, vilka utgjordes av ständigt fyra flygklara flygplan var kontrollerade av den tekniska personalen. Övningarna genomfördes med två J32E varje pass och med två anfallande J35F mot varje J32E. Sammanlagt flögs som mest 40 pass J32E och 80 pass J35F där tre till fem anfall kunde fullföljas varje pass. Under en ”störvecka” fick alltså 10-12 J35F-förare mellan 20-40 anfall fördelat på 6-8 störpass.
Det ”tekniska” upplägget under veckan var att de första passen anfalla målet i störfri miljö för att vänja sig med målekobilden mot J32E. Därefter sändes enklare, enskilda störtyper som påverkade radarns avstånds- eller antennföljningsfunktioner. Flygförarna klarade oftast av dem på ett bra sätt genom sin färska träning att hantera radarns manöverreglage och knappologi vid SUL35F-övningarna. Utvärderingstjänsten kontrollerade anfallen med hjälp av registreringen i Övningsrobot ÖRB 27, där RB27/28 möjlighet till följning i 5 sek efter avfyring verifierades och sannolikhetsgraden för vapenverkan utvärderades. Träffsannolikheten bedömdes oftast till G (60-90%) eller MyG (>90%).
Successivt ökades så svårighetsgraden med blandad avstånds- och vinkelstörning samt avslutades med en typ av enskild vinkelstörform som helt slog ut PS01 antennföljesystem. Efterhand blandades också flera störformer i s k ”Multimoder” och under de sista passen vid veckans slut var det nästan omöjligt att med radarsiktet fullfölja anfallen. Få förare kunde redovisa träffsannolikheter bättre än L (30-0%) under de sista passen. Det var nästan bara turen som avgjorde om ett anfall skulle lyckas. Radarn var alltså inte kapabel att tillsammans med flygföraren målfölja på ett sådant sätt att radarsiktet skulle kunna beräkna och presentera samt tillåta avfyring av RB27/28 eller RB24B/J inom dess nominella skjutgränser och/eller med rätt pekriktning mot den optimala kollisionspunkten för att kunna styra till målet. En bister sanning som hade ganska stor psykologisk effekt.
Vad som framkom av problem eller annat vid flygningarna med PS-01 mot PETRUS fick teknikerna på förbandet som regel ingen officiell kännedom om. Hemlighetsmakeriet satte stopp av naturliga skäl kan man tänka. Detta medförde komplikationer vid försök till verifiering av felanmäkningar - förelåg verkligt fel eller uppvisade radarn och radarsiktet typbundna beteende vid störning? Förbistringar uppstod. Den enda personal som var medvetna om begränsningarna i J35F som kom i dagen mot PETRUS var de som låtit konstruera kapseln och de fanns på FMV och ingen teknisk information kom därifrån. Problematiken kom ofta som en kalldusch för flygförarna/operatörena eftersom det var långa perioder mellan konfrontationerna. Och ingen visste någon råd vid de svåraste störformerna annat än att göra det bästa av situationen och försöka med visuell inriktning med ”fast” radarantenn vilket var systemtekniskt möjligt men krävde bakomläge på målet och ett gott handlag med radarns manöverorgan. Detta faktum uteslöt helt anfallen på mötande kurs, en stor degradering av systemet och en tillbakagång i taktisk strategi. Så stor verkan hade detta övningsmotmedel åstadkommit och det allvarligaste var att det var mer än sannolikt att varje större enskilt fientligt flygplan kunde medföra en kapsel med flertalet av PETRUS störfaciliteter.
Den person vid flygavdelningen på förbandet som närmast skulle ha systemkunskaper var en speciellt utsedd officer s k Vapenoff (senare Taktik och Systemofficer TSO). Han hade för ändamålet genomgått systemkurs på J35F vid Flygvapnets Bomb och Skjutskola FBS och skulle i den rollen fungera som systemproblemlösare när flygföraren konfronterade med systemfrågor eller vara länk mot teknisk kunnig personal på kompanierna eller Tekniske Chefen CT och dennes stab, där en Chef Flygsystemavdelning C Flygsyst ingick. Men det visade sig att kunskapen på Rr-, Siktes- och Robotsytemen, när elektronisk störning påverkade dessa ej räckte till hos någondera befattningshavare. Orsaken var att Vapenoff inte hade tillräcklig teknisk grundutbildning och CT hade för mycket administrativt arbete eller C Flygsyst för kort session vid förbandet i sin karriär. Men snäppet under denne fungerade jag som Kontrollingenjörens biträde inom mitt fack Flygplantele KIT vilket gav mig stora möjligheter till förkovran om elektroniska motmedel och berörda systemfunktioner i J35F. Detta mottogs också tacksamt av CT och C Flygsyst vilka medgav extra arbetstid till mig för detta samt att jag fick genomgå speciell utvärderingskurs för Övningsrobot ÖRB27 i två etapper.
Genom dessa kunskaper om siktesradar PS-01 och PS-011 och sikte S-7B3/31 ”inre liv” och i utvärdering av vapenverkan för RB27 och RB28 samt mina goda kontakter med flygförare i allmänhet som grundades på ett gott samarbete under åren vid tekniska funktionsfrågor på Siktesradar PS-02 och PS-01/011 samt Jakrobotarna RB24B, RB27 och RB28 fick jag dock klart för mig det mesta av problematiken med PETRUS och kunde stötta i alla led för snabba beslut om vilka servicåtgärder som behövde sättas in eller om mer systeminformation till flygförarna behövdes.
Det framfördes senare från bl a TSO vid F16 och även andra förband mer allmänt att en icke flygande teknisk beväpningssystemansvarig person, underlydande Tekniske Chefen och med de specifika systemkunskaper behövdes, för att tekniskt stötta TSO eller vara länk mot systemfolk på FMV, ERE och SAAB, när exceptionella beteenden uppträdde i flygplanens beväpningssystem. Behovet ansågs behöva tillgodoses både under freds- och krigsmässiga förhållande, helst en person på varje krigsbas men i första hand i Luftförsvarscentralen LFC. Det senare kom också att uppfyllas när jag 1986 beordrades delta vid en Krigsförbandsövning KFÖ och ingå i CT-s stab som speciell rådgivare i systemfrågor i LFC någonstans i Uppland. Vid debrifingen efter övningen konstaterades att min information och mina råd i taktiska systemfrågor, speciellt vid motmedelsfrågor varit till nytta för beslutsfattare och till sista länken, flygförarna.
I sammanställningen nedan av störningarnas inverkan på beväpningssystemet har klassificeringen av sannolikhet för vapenverkan, även benämnd träffsannolikheten gjorts med värdeuttrycken Mycket God MyG (> 90%), God G (90-60%), Mindre God MiG (60-30%), Liten L (30-0%) och Ingen (0%) vilka användes vid bedömning av jaktrobotar under dess operativa tid i FV. Utvärdering av denna sannolikhet utfördes med hjälp av studie av i Övningsrobot ÖRB27 registrerade parametrar för anfallen samt flygförarnas grunduppfattning om anfallens utgångspunkter. Dessa data var utomordentligt noggranna och representerade både beväpningssystemet vitala funktioner och status såväl som flygförarens manövrering av siktets beräkningar styrvillkor och tid till nominell avfyringspunkt samt målsökardata för en avfyrad skarp RB27-s målföljning i 5 sek efter fingerad avfyring. Utvärdering av träffsannolikheterna för RB24 utfördes enbart med hjälp av flygförarnas uppfattning eller eventuella visuellfilmning genom optiska siktet.
Enligt radaroperatörerna (flygförarna) i J35F framkom nedanstående problem vid ”störveckorna” eller vid andra mer realistiska övningar där elektronisk störning ingick. Jag har valt att dela upp redovisningen av systemfunktionerna i den ordning de kommer in och är verksamma under ett anfall, först Sikteradarn sedan Radarsiktet och sist bedömningen av Vapenverkan. Flygplanets Radar och Störsändarens sändning betecknas Rr och Ss.
Men först några tillrättalägganden och förklaringar avseende Radarns och siktets funktioner samt övrigt att iaktta vid genomgången av beväpningssystemets olika delar under anfall mot störande mål med PETRUS-kapsel aktiverad:
Anm 1. Val av antennföljning på brusstörning gjordes med strömställare S0/S1 i läge S1 och val av antennföljning eller IR-följning gjordes med strömställare RR/IR. Övriga val av olika Rr-moder och val av Hastighetstillskott HT gjordes med en Strömställare F0/F1/F2, samtliga samlade på Radarns Handkontrolls HK övre del. Radarns hela inlåsningsfas från Rr-mod SPANING tog 2 sek till Rr-mod DA-S0. Det gick i två steg där förstärkningsgraden i följningen minskade från ca 100 ggr under 1 sek till ca 25 ggr nästa sek. Efter 2 sek inkopplades accelerationsbegränsare för att förhindra målföljning på ”onormalt snabba målmanövrer”. Radarns avståndsminne var säkert i 3 sekunder och antennen gyrostabiliserade vid målekobortfall. Vid HT fördröjdes inlåsningsfasen 1 sek med ökad följningsförstärkningen till 25 ggr. Kantföljning på målekot, FRAM eller BAK kunde väljas initialt och efter etablerad avståndsföljning gjorde siktet detta automatiskt.
Anm 2. Förklaring av Rr-moder i redogörelsen nedan;
Anm 3. De specifika funktionskillnaderna mellan PS-01 och P-011 vid Störsändning Ss från PETRUS redovisas när sådana finns i samband med respektive störform.
Anm 4. Vid vapenval RB27 (RR) eller RB28 (IR) på Vapenväljaren VV räknade siktet för Direktanfall DA och med VV i läge RB24 räknade siktet för Hundkurva HK. Båda anfallstyperna kunde inledas med Kurvanfall
Anm 5. Endast robotanfall med RB27 och RB28 behandlas här nedan eftersom RB24 nyttjades i mycket liten utsträckning på J35F under dess period på F16 och AKAN-anfall skedde visuellt utan målinmätning med Radarn.
Nedan redovisas J35F1/2 hela beväpningssystem B-3/31 beteende och inverkan av PETRUS störkapsel vid anfall med RB27 och RB28.
Maskerande störningar från PETRUS.
STÖRNING KB (Kontinuerligt Brus) :. Denna Ss dolde målekot (J32E) effektivt med brusmodulerad bärvåg till målavstånd ca 1 km varefter målekot ”brände” igenom bruset på kortare avstånd.
Siktesradarn: Anfallstyp DA; Om operatören hunnit etablerats målföljning till Rr-mod DA-S0 före det Ss inleddes, upphörde avståndsföljningen när målekot doldes av Ss och antennföljning valdes då med omkoppling till Rr-mod DA-S1 med avståndsföljningen i minnesgång. Information om målavståndet kunde dock erhållas dels från markorganisationen STRIL via styrdataöverföringen på Datalänkcirkeln DLC läge på Rr-indikatorn eller från målekots synbara läge i Ss-fri period (<1 sek var 5:e sek) då störkapselns låsmottagare uppdaterade målets Rr-frekvensen. Därför kunde avståndsuppdatering ske nästan fullt ut i denna mod med så kallat Hastihetstillskott HT så länge Ss varade. Däremot om Ss inleddes redan i Radarns spaningsskede måste Rr-mod SIM-DA väljas direkt via en kort sekvens antennföljningen på Ss i Rr-mod HK-S1 som övergångsmod till fortsatt antennföljningen i Rr-mod SIM-DA. Där uppdaterades målavståndet som kunde simuleras med inställning och justering av Am (stroben) läge och på ett reglage för Relativa Hastigheten RH. Störformen betraktades vid DA som enkel att handha med relativt liten stressnivå med anledning av att mål och jakt rörde sig på raka banor utan förändringar i närmandehastighet och vinkellägen till varandra som varade in till avfyring av RB.
Anfallstyp KA; Anfallstypen kunde väljas av STRIL i undantagsfall. Härvid leddes jakten till ett utgångsläge 90 grader tvärs målbanan på ca 20 km-s avstånd till målet varefter den leddes av STRIL och eller via egen Rr-målföljning i sväng i sin bana in mot målet med ca 15 graders förhållning. Härvid förändrade successivt avståndet till målet och målvinkeln hela tiden. Med denna anfallsprofil måste alltid Rr-mod SIM-DA väljas med funktion som vid DA ovan. Anfallet förflöt dock sedan med indikerat styrfel vilket förutom uppdateringen av RH ökade stressnivån ytterligare under insvängen mot målet. Dock avtog stressen i slutskedet av kurvan ca 8-10 km till målet i dess baksektor vid övergång till DA, då styrfelet styrdes bort och avståndsförändringen försvann och anfallet fortsatt i Rr-mod SIM-DA in till avfyring av RB.
Radarsiktets: Anfallstyp DA; Vid Ss i Rr-mod SIM-DA påverkades DA-beräkning i viss mån beroende på om felaktighet förelåg i uppdateringen av avstånd på Am (stroben) och/eller RH i slutskedet av anfallet. Anfallstyp KA; Vid Ss i Rr-mod SIM-DA genomfördes kurvan in mot målet med styrfelsindikering på Rr indikator och avstånds- och RH-uppdatering. I slutskedet av anfallet, ca 8-10 km målavstånd i målets baksektor övergick anfallet i DA och fortsatt med följning i Rr-mod SIM-DA som vid DA ovan.
Vapenverkan: Anfallstyp DA; Träffsannolikheten s bedömdes om MyG för resp RB eftersom RB27 följde på Ss och RB28 följde på målets varma delar efter avfyring. Anfallstyp KA; Träffsannolikheten s bedömdes om MyG för resp RB enär övergång till anfall i DA gjorts i god tid före avfyring.
STÖRNING IB (Intermittent Brus): Denna Ss var i grunden KB men med avbrott i Ss, som kunde varieras med valbara program i regelbundna och oregelbundna intervaller.
Siktesradarn: Anfallstyp DA; Om operatören hunnit etablerat målföljning till Rr-mod DA-S0 före det Ss inleddes upphörde avståndsföljningen när målekot doldes av Ss och antennföljning valdes med omkoppling till Rr-mod DA-S1 med avståndsföljningen i minnesgång. När Ss upphörde valde operatören snabbt Rr-mod DA-MINNE genom manöver S0, dels för att gyrostabilisera antennen och dels för att etablera avståndsföljning eventuellt med HT på målekot för full målföljning igen. När sedan Ss kom och gick igen måste proceduren upprepas. Ss skapade därför en högre stressnivå hos operatören och krävde en mer invand knappologi med snabba växlingar mellan Rr-mod DA-S1 vid Ss och Rr-mod DA-S0 i Ss-fri period. När eventuella styrfel styrts bort behövdes dock endast utföras manöver S1 vid Ss och S0 i Ss-fri period eftersom mål och jakt då hade konstanta flygbanor och Rr-s uppfattning om antennläge och målavståndet stämde väl med verkligheten vid minnesgången vid övergång från Rr-mod DA-S1 till DA-S0 vid Ss-fri period. Däremot om vid 2 sek Ss + 2 sek Ss-fri period eller kortare tidsintervaller inleddes redan i Radarns spaningsskede kunde inte Radarns avståndsföljning etableras i Ss-fri period på grund av dess konstruktion måste Rr-mod SIM-DA väljas direkt för att därifrån komma till Rr-moderna DA-S1 / DA-S0 och fortsatt knappologi i den mån operatören hade förmåga att hinna med. Anfallet avslutades med varierande stressnivå beroende tidsintervallerna på Ss men som också kunde höjas i slutskedet vid avfyringen av RB27 vilket måste anpassas för mest möjliga målföljetid, se vapenverkan nedan.
Anfallstyp KA; Denna anfallstyp kunde även här i undantagsfall väljas av STRIL varvid jakten hamnade i sväng i sin bana mot målet med förändrade målvinklar och målavstånd under inflygningen. Detta medförde en mer stressig miljö för operatören med utökad knappologi när antennföljning på Ss med manöver S1 måste ske snabbt för att inte målet och Ss skulle hinna vandra ut ur antennloben vid Rr-antennens gyrostabilisering innan antennföljning på Ss etablerats. Hanteringen försvårades också på grund av att RH till målet successivt minskade i svängen under tiden Am (stroben) gick i minnesgång med den senaste RH när Ss inleddes och manöver S1 utfördes. Detta krävde att ytterligare en manöver HT utfördes i Rr-mod DA-MINNE för återförande av Am (stroben) till målekot och etablering av avståndsföljning och Ss-fri period. Stressnivån avtog dock markant i slutskedet av anfallet, ca 8m km målavstånd i målets baksektor vid övergång till DA och fortsatt Rr-mod DA-S1 och DA-S0 in till avfyring av RB jml som för DA ovan. Med Rr PS-011 och IR-spanaren följande på målets värme behövdes inte manöver S1 för antennföljning vid Ss-perioden och endast avståndsföljningen behövde övervakas med HT i Ss-fria period.
Radarsiktet: Anfallstyp DA; Vid Ss och växling mellan Rr-mod DA-S0 och DA-S1 kunde den beräknade avfyringsangivelsen marginellt försenas på grund av snabbhet i val av antennföljning Ss eller Ss-fri period och ev åtgärd för etablering av avståndsföljning i Ss-fri period.
Anfallstyp KA; Vid Ss blev förseningen av den beräknade avfyringsangivelsen marginellt större på grund av att målets läge förändrades och operatörens snabbhet i val av antenn- och avståndsföljning samt att även Rr och siktets insvängningstiden vid resp följningsetableringar inverkade.
Vapenverkan: Anfallstyp DA; Här bedömdes sannolikheten för träff för RB27 som G – I beroende på avfyringstillfälle och styrtid eftersom RB27 kunde följa på Ss men ej själv låsa på målekot i störfri period (minne max 1 sek). Vid längre Ss-intervaller och om lämplig Ss-fri period inväntades för säker Rr-avståndslåsning på målekot vid avfyring, förbättrades träffsannolikheten från L till MyG beroende på total målföljning undre robotgångtiden till målet vid det aktuella flygfallet. RB28 påverkades inte i sin målföljning efter avfyring och sannolikheten för träff var MyG.
Anfallstyp KA; Här påverkade förseningen av den beräknade avfyringsangivelsen marginellt varför sannolikheten för träff bedömdes för RB27 som MiG – I och för RB28 som MyG eftersom den inte påverkades av Ss i sin målföljning efter avfyring.
STÖRNING EF (Ekoförstoring); Denna Ss presenterade ett i avståndsled ”flyttbart” falskt ”Rr-eko” vilkets styrka även kunde regleras. ”Förflyttningen” kunde göras mot längre eller kortare avstånd, dock utnyttjades aldrig ett tidigareläggande eftersom Rr kunde eliminera detta med JITT (jittrad PRF).
Anm. Med RB27 vald för avfyring kopplades JITT bort 10 sek före avfyring och ett eventuellt utlagt falskekot på närmare avstånd än målekot kunde då uppträda igen.
Siktesradarn: Anfallstyp DA; Rr kunde av misstag bringas att målfölja på ett förstorat Rr-eko på längre avstånd innan upptäckt av det verkliga målekot varvid anfallet fortlöpte på detta måleko i Rr-mod DA-S0. Vid följning på Ss reglerade Rr-mottagarens Automatiska Känslighetsreglering AKR ned mottagarens förstärkning och undertryckte därvid det verkliga målekot vilket inte syntes förrän på mycket kort avstånd (< 1 km).
Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
Radarsiktet: Anfallstyp DA; Siktets beräkning med avståndet till falskekot som grund medförde inget eller mer eller mindre helt fel presentation av det nominella skjutavståndet och styrinformationen till målet i Rr-mod DA-S0 som var enda möjliga val. Stor risk fanns för att nominellt skjutavstånd aldrig nåddes innan passage av RB inre skjutgräns. Om operatören uppmärksammar misstaget (bland annat med vägledning av målpresentationen från STRIL på DLC) och låser upp följningen på EF ökar AKR Rr mottagare känslighet och målekot dyker upp och följning kan etableras genom HT på detta. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
Vapenverkan: Anfallstyp DA; Bedömdes som MyG om inget skjutavståndsfel förelåg men med minskande träffsannolikhet från G – L beroende på hur stort avståndsfelet var samt som I om avfyring utanför RB inre skjutgräns. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
STÖRNING BP (Bred puls); Denna SS presenterade ett brett falskt ”Rr-eko” omedelbart bakom målekot förutsatt att ”jittrad” JITT PRF valts. Med JITT ej valt utbredde sig det falska ”ekot” även framför målekot lika mycket och helt dolde detta eftersom Ss kunde ske fördröjt till nästa avståndssvep, s k ”andra gången om” störning.
Siktesradarn: Anfallstyp DA; Rr kunde vid JITT valt avståndsfölja och därmed antennfölja i Rr-mod DA-S0 på Ss ”framkant” eller ”bakkant” vilka var identiska med målekots framkant resp Ss bakkant, det senare alternativet var dock inte realistiskt. Vid urkopplad JITT och vid RB27-anfall och efter B-prep, då siktet automatiskt frånkopplade JITT för regelbunden PRF, doldes målekot helt av den måltäckande Ss-pulsen. Härvid upphörde avståndsföljningen och minnesgång inträdde i Rr-mod DA-MINNE och vilseledde avståndsuppdateringen. Vid val av Rr-mod DA-S1 kunde PS-01 antennfölja på störpulsen med fortsatt minnesgång i avstånd. För ev avståndsuppdatering kunde HT manövreras med information från DLC på Rr-indikatorn, dock ej RH. För det krävdes att Rr-mod SIM-DA uppkopplades via Rr-mod SPANING och HK-S1. För PS-011 gällde vid val av Rr-mod DA-S1 att ingen antennföljning erhölls på grund av dess annorlunda konstruktion än PS-01. Vid val av Rr-mod DA-S0 och IR och när IR-spanare 71N kunde följa på målets värme, gavs funktion som med PS-01 i Rr-mod DA-S1 ovan. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
Radarsiktet: Anfallstyp DA; Beräkningen för presentation av DA påverkades inget eller marginellt så länge JITT valts. Om JITT ej valts från början kunde ett större avståndfel på verka beräkningen av nominellt skjutavstånd. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
Vapenverkan; Anfallstyp DA; Bedömdes som G – MiG för RB27 beroende på avfyringstillfälle och som MyG för RB28. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
Vilseledande Repeterstörning från PETRUS.
STÖRNING LA (EF + Låg acceleration), HA (EF + Hög acceleration), PLA (Flera EF + Låg acceleration), PHA (Flera EF + Högacceleration). Ss presenterade ett eller flera falska avhakande ”Rr-ekon” med valbara accelerationer, LA (ca 5 G), HA ca 25 G), PLA (ca 5 G), PHA (25G).
Siktesradarn; Anfallstyp DA; Rr följefunktion i avstånd överlåste alltid vid Ss LA och PLA på falska Rr-ekon på grund av att dess accelerationsbegränsare i sin konstruktion låg vid ca 5.5 G. DA genomföres i Rr-mod DA-S0 med noggrann uppföljning av Rr-indikatorn och genom med HT ständig ”målväxling” till följning på det närmaste ekot via tillfälliga uppehåll för HT i Rr-mod DA-MINNE. Vid RB27-anfall och efter B-prep kunde falskekon även presenteras på kortare avstånd än målekot vilket ur RB-synpunkt inte utnyttjades mot J35F. Hanteringen av Ss upplevdes som mycket stressande speciellt vid Ss PLA. Vid Ss HA ingen eller liten inverkan på radarns avståndsföljesystem.’ Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan, dock med större risk för missad antennföljning i svängen in mot målet..
Radarsiktet; Anfallstyp DA; DA -beräkning medförde att styrinformation påverkades negativt och tiden kvar till nominellt skjutavstånd fördröjdes mot inre skjutgränsen. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
Vapenverkan; Anfallstyp DA; Bedömdes för RB27 och RB28 som MyG – L beroende på ev styrfel och/eller om inre skjutgränsen passerades eller ej. Vid Ss HA låste RB27 avståndssystem relativt lätt över på Ss med vapenverkan L-I. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
STÖRNING PT (Pulståg); Ss presenterade flera falska ”Rr-ekon” efter varann som en ”Stege” med valbart avstånd emellan.
Siktesradarn; Anfallstyp DA; På Rr-indikatorn presenterades en ”Stege” där, om JITT valts dess närmaste (nedre) ”pinne” var samma som målekot på vilken Rr-låsning etablerades i Rr-mod DA-S0. Om JITT inte valts och vid RB27-val efter B-prep presenterades ”stegen” över hela avståndssvepet och vilseledde operatören och vid Rr-följning ommålavståndet mer eller mindre beroende på vilket falskt måleko Rr låst på. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
Radarsiktet; Anfallstyp DA; DA-beräkningens påverkades inte om Rr-följning etablerats på rätt ”pinne”. I annat fall fel beräkning av tid kvar till avfyring samt i viss mån även styrfelspresentationen. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
Vapenverkan; Anfallstyp DA; Bedömdes som MyG vid Rr-följning på rätt ”pinne”. I annat fall som MiG-L beroende på avfyringstillfälle mot skjutgränserna. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
Vilseledande vinkelstörning från PETRUS.Allmänt För PS-011 gällde generellt att om antennpåverkan eller avhakning av Rr-antennföljning erhölls på grund av Ss var val av målföljning med flygplanets IR-spanare 71N för ”blandad” målföljning ett alternativ. Om IR-spanare förmådde etablera följning på målets varma delar (motor(er) kunde den till IR-spanarens -målsökare slavade Rr-antennen ge stabila mållägesdata i samtliga Rr-moder. Detta var dock ej möjligt mot J32B på längre avstånd på grund av dess motors relativt låga värmestrålning och i framsektor avskärmades strålningen ytterligare av flygplanets främre del. En annan negativ aspekt var IR-spanarens relativt låga funktionstillgänglighet efter några år i drift. Detta berodde bl a på att dess kylutrustning, som var förutsättningen för dess höga känslighet och funktion i övrigt successivt fick sämre funktion på grund av bristande underhåll. Den berörde funktionen var målsökarens Kylmaskin, där bland annat vattenförekomst i kylmedlet orsakade frysning, flygplanets miljösystem vars bristfälliga intrimning vilket påverkade kylningen av elektroniken samt systemets intrimning i övrigt.
STÖRNING KBSS (KB med Super Spinn) Denna Ss dolde målekot från J32E effektivt ned till målavstånd < ca 10 km samt hade 100% överlagrad avhakande modulation.
Siktesradarn; Anfallstyp DA; Vid Ss kunde Rr ej avståndsfölja på måleko i Rr-mod DA-S0. DA kunde ej heller genomföras i Rr-mod DA-S1 eller SIM-DA med antennföljning på Ss på grund av dess stora avhakningsauktoritet på antennföljesystemet. ”Visuellt” HK-anfall kunde genomföras med RB27 eller RB28 mot målet genom optiska siktet eller med RB27 i en modifierad Rr-mod ”DA-F1” (Rr-antennen fast till flygplanet) med manuellt inriktning av Rr-antenn och med inriktningsinformation från Ss på Rr-indikatorn. Avståndsuppdatering kunde sedan göras på radarindikatorn vid målavstånd > 10 km på så kallat ”genombränningseko” (målekot syntes genom störningen på grund av det var 100% modulerat). Ss-formen betraktades för RB27 som svår och stressande att handha oavsett val av metod – ”head upp” eller ”head down”. Inriktning ”head upp” krävde vid RB27-anfallet Ss- och avståndskontroll på Rr-indikatorn då och då och upplevdes som splittrande och ”head down”-metoden besvärlig på grund av Rr-indikatorpresentationen att rikta med. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
Radarsiktets; Anfallstyp DA; DA-beräkning uteblev och ingen måldetekteringssignal från RB27 eller RB28 fanns vilka vid visuellt HK-anfall måste inriktas och avfyras enl tumregel och med manuella prepareringar av RB. RB27 hade målsökaröppning var 25 gr och kunde inriktas relativt grovt. RB28 målsökaröppning var 6 gr och krävde noggrannare inriktning vilket var svårt vid inriktning ”head down” via Rr-indikatorns information. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
Vapenverkan; Anfallstyp DA; RB27 målsökare hade möjlighet att följa på Ss på grund av att dess spinnfrekvens avvek stort från Rr-antennens och därmed Ss modulation. Sannolikheten för träff bedömdes därför som MyG – G beroende på inriktningsfel och avfyring inom skjutgränserna och om Ss fanns under hela robotbanan. Upphörde Ss under robotbanan minskade sannolikheten till MiG - I beroende på hur mycket målföljning- och styrtid RB fick på Ss. För RB28 bedömning som MyG om avfyring inom skjutgränserna och inriktning inom 6 gr för RB28. Vid utanför skjutgränserna MiG – I. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
STÖRNING EFS (EF med fasvänd Spinnmodulation); Ss presenterade ett falskt ”Rr-eko” med överlagrade, motfas modulation.
Siktesradarn; Anfallstyp DA; Rr kunde av misstag bringas att målfölja på det förstorade Rr-ekot på längre avstånd innan upptäckt av det verkliga målekot. Ss reglerades ned Rr-mottagarensförstärkning av AKR och Ss spinnmodulation störde antennföljningen ut från lobrotationscentrum till 3-3.5 gr som också ”roterade” sakta. Operatören uppmärksammade snart misstaget på grund av Ss spinnmodulation och låser upp följningen. När målekot dyker upp på grund av AKR och följning etableras genom HT på detta kommer Ss åter och spinnstöra antennen som ovan. Anfallet kunde med viss svårighet genomföras på Ss och växling till målekot i Rr-mod DA-S0 resp DA-MINNE och ökad stressen markant vid knappandet mellan följning och HT. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan, dock med större risk för missad antennföljning i svängen in mot målet.
Radarsiktet Anfallstyp DA; Siktets beräkning med avståndet till falskekot som grund medförde inget eller mer eller mindre helt fel presentation av det nominella skjutavståndet. Styrinformationen blev också hela tiden kraftigt störd på grund av antennens sakta rotation 3-3,5 gr ut från lobcentrum. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
Vapenverkan Anfallstyp DA; Bedömdes för RB27 som MyG – MiG beroende på hur länge Ss fortgick efter avfyring och hur stort inriktnings- och avfyringsfelet i avstånd blev. För RB28 bedömdes träffsannolikheten som MyG – MiG förutsatt avfyring inom 6 gr, i annat fall som I. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
STÖRNING LAS (EF + Låg acceleration + motfas spinnmodulation) HAS (EF + Hög acceleration+ motfas spinnmodulation) PLAS (Flera EF + Låg acceleration+ motfas spinnmodulation). PHAS (Flera EF + Håg acceleration+ motfas spinnmodulation). Ss presenterade ett eller flera falska avhakande ”Rr-ekon” med valbara accelerationer, LA (ca 5 G), HA ca 25 G), PLA (ca 5 G), PHA (ca 25 G) med överlagrade, motfas modulation.
Siktesradarn; Anfallstyp DA; Rr följefunktion i avstånd överlåste alltid vid Ss LAS och PLAS på falska Rr-ekon på grund av att dess accelerationsbegränsare i sin konstruktion låg vid ca 5.5 G samtidigt som antennföljningen stördes som vid EFS ovan. DA genomföres i Rr-mod DA-S0 med noggrann uppföljning av Rr-indikatorn och genom med HT ständig ”målväxling” till följning på det närmaste falska ekot gentemot målekot via tillfälliga uppehåll för HT i Rr-mod DA-MINNE. Vid RB27-anfall och efter B-prep kunde falskekon även presenteras på kortare avstånd än målekot vilket ur RB-synpunkt inte utnyttjades mot J35F. Vid Ss HAS och PHAS ingen eller liten inverkan på radarns avståndsföljesystem men störde antennföljningen marginellt. Hanteringen av Rr upplevdes som mycket stressande speciellt vid Ss PLAS Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan, dock med större risk för missad antennföljning i svängen in mot målet.
Radarsiktet; Anfallstyp DA; DA- beräkning stördes och medförde felaktig styr- och tidsinformation till avfyringpunkten samt vid RB27-anfall efter B-prep kunde även avfyringssignalen tidigareläggas som vid Ss LA, HA och PLA ovan. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
Vapenverkan; Anfallstyp DA; Bedömdes för RB27 och RB28 som MyG – L beroende på om inre, för RB27 även yttre skjutgränsen passerades eller ej eller hur stort inriktnings- och avfyringsfelet blev. För RB28 förutsatt också, vilket kunde vara svårt, att avfyring skedde inom 6 gr, i annat fall som I. För RB27 gällde även premisserna för följning under robotbanan och bedömning som vid LA, HA och PLA ovan, d v s G – I. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
STÖRNING LASS (EF + Låg acceleration + Super Spinn) HASS (EF + Hög acceleration+ Super Spinn) PLASS (Flera EF + Låg acceleration+ Super Spinn). PHASS (EF + Hög acceleration+ Super Spinn) Ss presenterade ett eller flera falska avhakande ”Rr-ekon” med valbara accelerationer, LA (ca 5 G), HA ca 25 G), PLA (ca 5 G) ), PHA (ca 25 G) med överlagrad Super Spinn med 100% överlagrad avhakande modulation.
Siktesradarn: Anfallstyp DA; Rr kunde endast målfölja på måleko i Rr-mod DA-S0 under mycket korta sekvenser varför DA endast med svårighet kunde genomföras på grund av Ss stora auktoritet på Rr antennföljesystem vid följning på Ss. HK-anfall kunde dock genomföras i en modifierad Rr-mod ”DA-F1” som vid Ss KBSS ovan med ”fast” radarantenn och med inriktning mot målet med information från Rr-indikatorn och Rr låslucka på falskekot (Anflygningsvinkeln AV tänd) vilket upplevdes som en ytterst svår manöver. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
Radarsiktet: Anfallstyp DA; Ingen DA-beräkning. Från RB27 och RB28 kunde ingen måldetekteringssignal fås vilka måste inriktas i HK och avfyras enl tumregel och med manuella prepareringar. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
Vapenverkan: Anfallstyp DA; Bedömdes för RB27som MyG – L förutsatt AV tänd på Rr-indikatorn (RB27 avståndslucka i tid med Ss) och var inom skjutgränserna enl tumregler när avfyring skedde.
Stängdes Ss av under robotbanan minskade sannolikheten mot I beroende på hur mycket målföljnings- och styrtid RB fick på Ss. För RB28 bedömdes sannolikheten för träff som MyG – L beroende på var inom skjutgränserna avfyring skedde och förutsatt målet inom 6 gr i RB målsökare i annat fal som I. Metoden var svår manöver vid inriktning ”head down”. Anfallstyp KA; Samma resultat som vid anfallstyp DA ovan.
Dessa problem som förelåg i siktesradar PS-01 och PS-011 funktioner och som inverkade på förutsättningarna för optimal vapenverkan i de utvalda målen kunde, tack vare möjligheten till en noggrann verifiering av de tekniska delfunktionerna vid de olika störformerna leda till att tekniska ändringar senare kunde införas i dessa radarstationer.
Ändringarna utgjordes bland annat av;
Dessa ändringar benämnda HAWEE 1 medförde ökade förutsättningar för stabil målföljning trots störning fram till avfyring av respektive robot.
Störkapsel PETRUS NY
Bilden visar blockschema på Petrus Ny
Min tredje kontakt med Övningsmotmedel var under andra halvan av 1980-talet när flygavdelningen vid F16 började genomföra flygningar mot en modifierad PETRUS-konstruktion benämnd PETRUS NY (eller först benämnd ”PETRUSJA” under en kortare tid) som tagits fram vid SRA på uppdrag av FMV:FlygEL6. Den kunde också hängas på J32E samt strömförsörjas från flygplaninstallationen och manövreras från en Manöverenhet i flygplanets baksits. Utrustningens elektronik var nu datoriserad medan antennerna var identiska bakom radomerna bak och fram. PETRUS NY var manövermässigt snarlika sin föregångare men den nya tekniken medförde bl a att dess sändares frekvens och olika störformer mer utstuderat kunde väljas av operatören. Kapseln hade mottagare för radarvarning och belysningvarnare, en nyhet anpassad för Siktesradar PS-46 i Jaktviggen, JA37 samt en avsevärt snabbare låsmottagare, med en Halvledaroscillator HLO som referens för avstämning av sändaren och med minne för tre fasta frekvenser samt registrering av radarpulser för utvärdering av radartyp. Sändarens uteffekt var 220W och samma huvudstörningstyper som i den äldre varianten fanns att välja på, det vill säga Maskerande störning med Brus samt Vilseledande Repeterstörningar. Eftersom antalet störformer hade ökat (nya tillkommit) samt manövreringar och inställningar ändrats hade beteckningarna på de olika störtyperna ändrats. Nedan beskrivs de som var specifika mot PS-46.
Maskerande störning på radarfrekvens.
Vilseledande repeterstörning med radarpulsreferens.
Flygplan JA37 och PS-46.F16 opererade från 1986 med JA37. Denna version av Viggen var för jaktuppdrag utrustad med siktesradar PS-46 för målinmätning i tre kordinater, avstånd, sida och höjd, ett integrerat radarsiktesprogram i flygplandator CD-107. Radarpresentationen erhöll föraren på en Målindikator MI ingående i utrustningen Elektronisk Presentation EP-12. JA37 kunde beväpnas med jaktrobotar RB71, RB74 och RB24J och en 30 mm automatkanon AKAN. Alla elektroniska störningar från PETRUS NY mot PS-46 hade även inverkade på radarsiktets beräkningar i CD-107 för styr- och tidsinformation i Genskjutningsanfallet GA och efterföljande Jaktkurveanfall JK med RB71 och RB74 samt Hundkurveanfall HK med RB24J och i slutändan också på robotarnas prepareringar före avfyring och möjlighet att nå sitt mål.
Radarn var mycket datoriserad och komplicerad och hade manöverlogik till tre stationära arbetsmoder, en spaningsmod SP och två följemoder Följning Under Spaning FUS eller Kontinuerlig Följning KF och därutöver några övergångsmoder. Modlogiken beskrevs utförligt i en för förare och teknisk personal gemensam Beskrivning JA37 del 3 varför systemfunktionerna lätt kunde identifieras i den taktiska situationen samt vid samtal med teknisk personal.
PS-46 speciella Belysningssändare BES för målsignaler till RB71 målsökare kunde frekvensmässigt styras över en del av X-bandet och beordras till en fast frekvens för anpassning till varje RB71 målsökare.
Varje PS-46 Effektsteg EFF i sin tur kunde styras från en Frekvensenhet FE till någon av tre olika förvalda frekvenser vilka var spridda över en del av X-bandet och flygplanparken efter direktiv av CFV krigsplan. Vid vapenval AKAN växlades dessutom EFF-frekvenserna runt i 9 ms-intervaller. Detta försvårade Ss mot PS-46 i en krigssituation och förhindrade även påverkan av varandras system vid radaranfall mot gemensamt mål.
Automatiska störningsinhiberande faciliteter som fanns inbyggda i PS-46 var verksamma mot alla typer av rems- eller elektronisk Ss. Radarns digitala Signalbehandlingsenhet SBE analyserade målekot och falskekon i detalj med hjälp av en datoriserad ”Målrörelsemodell” MRM. Radarns Styrenhet STY ändrade sedan arbetssätt automatiskt och ”omtalade” för föraren om Ss kom från marken eller från flyg- eller sjöfartyg som Bakgrundsstörning BS eller från målet som Egenstörning ES och om Radarn följde i 2- eller 3 koordinater 2K resp 3K-följning, vilket också valdes automatiskt. Dessa val redovisas närmare under avsnitten nedan vid de respektive störtyper som konfronterades radarn. Radarsiktesprogrammet i CD-107 beräknade och presenterade styrinformation och avfyringstidpunkt för GA och efterföljande JK när RB71 eller RB74 valts samt för Hundkurva HK när RB24J valts.
Här bör också nämnas det stöd som föraren hade av flygplanets Styrautomat SA. Med dess STYR-funktion (autopiloten) inkopplad kunde flygföraren med SA styrreglage enklare manövrera flygplanet, avlastas från manuell flygning och kunde lägga mer tid på sin operatörsroll. Ytterligare hjälp hade föraren i läge Automatsiktning AS där SA även stöttade inriktningen.
Störutbildningen på PS-46 vid FV divisionerEn störutbildningsperiod vid en JA37-division följde i princip samma mönster som gjorts på J35-divisionerna, det vill säga varade under en vecka och genomfördes mot J32E med störkapslar av PETRUS NY-modell. Även remsfällning från Fällare BOX 3 förekom. Flygplanen, två J32E med en till två reservflygplan samt personalen, förare och operatörer ur målflygdivisionen var under tiden ombaserade till den övande divisionens förband. Vid denna tid berördes 8 jaktdivisioner JA37 och 3 div J35F/J i FV av utbildningen eller uppdateringen beroende på förarstatus. Beroende på målflygdivisonens tillgång på J32E och personal för flygning och service kunde jaktförarna beredas störflygningar 3-4 veckor om året.
En ”störvecka” var intensiv och de förare som berördes hade, innan flygningarna mot J32E började uppdaterat sig i radarhanteringen i Simulator SUL JA37 i vars taktiska systemdel mer eller mindre verklighetslika radarstörformer kunde simuleras. Övningarna genomfördes med två J32E på samma sätt och i ungefär samma omfattning som under J35F-tiden. Under en störvecka fick alltså 10-12 JA37-förare mellan 20-40 anfall fördelat på 6-8 störpass.
Det ”tekniska” upplägget under veckan följde även de samma mönster som under J35F-tiden med först ingen Ss, sedan enklare enskilda störtyper som påverkade radarns avståndsfunktioner. Radarn själv och flygförarna klarade oftast av dem på ett bra sätt, de senare genom sin färska träning att hantera Radarns manöverreglage och knappologi vid SUL37-övningarna. Som utvärderingshjälpmedel fanns Utbildningsregistrering, UTB där föraren kunde kontrollera anfallen. Träffsannolikheten bedömdes oftast till G (60-90%) eller MyG (>90%).
Successivt ökades så svårighetsgraden med blandade avståndsstörningar. Efterhand blandades också flera störformer i så kallade ”Multimoder”. Den ökade svårighetsgraden påverkade Radarns signalbehandling i viss grad och förändrade vapnens träffsannolikhet negativt i storleksordningen 20 %, d v s till G till MiG (30-60%).
Den person vid flygavdelningen på förbandet som närmast skulle ha systemkunskaper för JA37 var, som tidigare nämnts en speciellt tillsatt officer s k TSO (Taktik och System Officer). Han hade genomgått kurser för ändamålet på JA37-systemet. I sin roll som TSO skulle han fungera som systemproblemlösare eller vara länk mot teknisk kunnig personal på kompanierna eller Tekniske Chefen CT och dennes stab. Där ingick bland andra jag i min roll som flygplanteleingenjör. Med anledning av tidigare uttalande av TSO att en icke flygande teknisk beväpningssystemansvarig underlydande CT behövdes för att täcka alla slag av systemfrågor fick jag i min tjänst genomgå samma systemkurs som TSO på JA37 vid FBS 1986. Detta var unikt men visade sig även vara mycket värdefullt eftersom mina tekniska kunskaper kom till nytta redan under kursens gång och flertalet frågetecken rätades ut och nya idéer kom upp.
Genom mina förvärvade kunskaper om PS-46 funktion (jag hade också tillgång till STY programbeskrivning, en gåva från Conny Karlsson och Björn Jägerström vid dåvarande Eriksson Radar Electronics ERE i Mölndal) och siktesprogrammet i CD-107 samt mina goda kontakter med flygförare i allmänhet, grundade på ett gott samarbete sedan J35F-tiden fick jag sedan klart för mig det mesta av problematiken med PETRUS NY. Därmed kunde jag stötta i alla led för snabba beslut om och vilka serviceåtgärder som behövde sättas in eller om mer systeminformation till flygförarna behövdes.
Enligt radaroperatörerna i JA37 framkom nedanstående problem vid ”störveckorna” eller vid andra mer realistiska övningar där elektronisk störning ingick. Anm 1. Nedan redovisas JA37 hela beväpningssystem beteende och inverkan av Petrus Ny störkapsel vid anfall med RB71, RB74 och RB24J. Avvikelser robotarna emellan noteras var för sig. Anm 2. Anfallstyp för RB71/74 var Direktanfall/Jaktkurveanfall DA/JK och för RB24J Hundkurveanfall HK. Anm 3. Flygplanets Radar och Störsändaren/sändning betecknas fortsättningsvis Rr och Ss.
Maskerande störningar
STÖRNING K (Kontinuerligt Brus), ', I och IS (Intermittent Brus). Dessa Ss dolde målekot (J32E) effektivt till målavstånd ca 1 km.
Siktesradarn; Avståndsföljning i Rr-mod Följning Under Spaning FUS eller Rr-mod Kontinuerlig Följnig KF på måleko var ej möjlig. GA/JK/HK genomföres i Rr-mod FUS med avstängd EFF i TYST och med STRIL-stöttning i avstånd i Rr-mod 2K-följning (enbart antennföljning sida/höjd) på Ss. Vid KF avståndsuppdatering i minnesgång på Rr-s Målindikator MI vid Ss K dels från STRIL (stöttning) och via Datalänkcirkeln DLC eller visuellt i Ss-fri period (< 1 sek) då störkapseln uppdaterade Rr-frekvensen. Vid I och Rr-mod FUS skedde avståndsuppdatering automatiskt till övergång till Rr-mod 3K-följning vid låsning på målekot i Ss-fri period. Vid Rr-mod KF erhölls automatisk växling mellan Rr-moderna 3K / 2K med minnesgång vid Ss. Vid IS erhölls orolig följning i Rr-moderna FUS och KF med mest i 2K (ibland 3K). Alternativt manuellt val av 2K med manöver Avståndsmarkören Am (stroben) ”Längst Ut” (maxavstånd) Rr-mod MLU. Ss-formen K och I betraktades som enkel att handha. Vid Ss IS blev stressnivån något högre speciellt för RB24J på grund av att HK föregicks av Kurvanfall KA som genomfördes i sväng och följning på måleko måste ske omgående i stör- och störfri period på grund av den krökta anfallsprofilen.
Radarsikte; GA/JK-beräkningens påverkades vid Ss K avseende styrinformation och tid kvar till avfyring. Ss I och IS kunde, vid RB71-anfall medföra krav på manuellt prepareringsval av dopplersvepet för RB71.
Vapenverkan; Bedömdes för RB71/74 som MyG vid Ss K och I förutsatt inom skjutgränserna och målsignal från RB74/24J. Bedömning som MiG för RB71 vid Ss IS beroende på avvikelser av dopplervalet.
STÖRNING E (Ekoförstoring) Presenterade ett i avståndsled flyttbart falskt ”Rr-eko”.
Siktesradarn; Upptäckten av ett förstorat Rr-eko på längre eller kortare avstånd innan upptäckt av det verkliga målekot, inbjöd till målföljning i Rr-moderna FUS eller KF på det falska ekot. Övergång till Rr-låsning på det verkliga målekot utfördes när det uppträder.
Radarsiktet; GA/JK/HK-beräkning OK till avfyring.
Vapenverkan; Bedömdes som MyG för samtliga RB och målsignal från RB74/24J.
STÖRNING B (Bred Puls). Presenterade ett valbart brett måltäckande falskt ”Rr-eko”.
Siktesradarn; Avståndsföljning på måleko störd, 2-3 målekon syns. GA/JK/HK genomföres i Rr-moderna FUS eller KF på fel avstånd.
Radarsiktet; GA/JK/HK-beräkning påverkas. Fel avståndsdata påverkar följningen i Rr-mod 3K samt data till Rr och CD Målrörelsemodell MRM och dopplervalet till RB71.
Vapenverkan Bedömdes som MyG för RB74/24J om avfyring inom skjutgränserna och målsignal från RB74/24J, i annat fall som MiG till L förutsatt att RB målsökare avgav målsignal, om inte som I. För RB71 G – L beroende på dopplerval av CD eller manuellt val till RB71.
STÖRNING PF (Måltäckande Puls med Flankacceleationer). Presenterade ett valbart brett måltäckande falskt ”Rr-eko” med accelererande flanker.
Siktesradarn; Avståndsföljning på måleko mycket störd. GA/JK/HK i Rr-moderna FUS och 3K-följning om inlåsning lyckas. Annat fall 2K i Rr-mod EgenStörare ES.
Radarsiktet; GA/JK/HK-beräkning kraftigt påverkad. Fel avståndsdata påverkar Rr-mod 3K-s följningen samt data till Rr och CD MRM och dopplervalet till RB71.
Vapenverkan; Bedömdes som G för RB74/24J om avfyring inom skjutgränserna och målsignal från RB74/24J, i annat fall som MiG till L förutsatta att RB målsökare avgav målsignal, om inte som I. För RB71 vid Rr-mod FUS-data bedömdes som G – L beroende på dopplerval av CD eller manuellt val till RB71..
Vilseledande RepeterstörningSTÖRNING A (Avståndsavhakning, Låg-Hög acceleration), AE (Falskeko, Avståndsavhakning, Låg-Hög acceleration), AT (Pulståg, s k ”Polypuls”). Presentera ett eller flera falska avhakande ”Rr-ekon” med vissa mellanrum mot längre och kortare avstånd och valbara accelerationer..
Siktesradar; Ingen inverkan på Rr-följningen vid Ss AE och AT. Viss inverkan vid Ss A. GA/JK/HK genomföres i Rr-moderna FUS eller KF med 3K-följning utan åtgärder. Vid A erhålls felaktiga 3K-måldata men Rr-antennen och Rr MUS pekar rätt i Siktlinjeindikatorn SI, d v s på målet. Hanteringen vid Ss A upplevdes med viss stress.
Radarsiktet: Momentant felaktig GA/JK-beräkning påverkar inriktningen vid Ss A. HK-beräkningen OK. Kräver vid RB71-anfall manuellt val av dopplersvepet. Avfyring i Rr-mod FUS.
Vapenverkan: Träffsannolikheten för RB71/74/24J bedömdes som MyG vid Ss AE och AT vid inom skjutgränserna och vid målsökarsignal från RB74/24J, i annat fall MiG. Vid Ss A som MiG – L. Vid fel dopplerval för RB71 eller ingen målsignal frånRB74/24J bedömning som I.
STÖRNING PT (Pulståg, s k stege), PA (Pulståg, Asynkront), PR (Pulståg, valbar fördröjning mellan) Presenterade flertal falska ”Rr-ekon” efter varan som en ”Stege”, synkront eller asynkront eller med valbar fördröjning utgående från målekot mot kortare och längre avstånd.
Siktesradar; Rr etablerar följning på Ss ”Stegens stegpinne” vilken från STRIL utpekas som målekot. GA/JK/HK genomförs på normalt sätt i Rr-moderna FUS eller KF.
Radarsiktet; Ingen påverkan på GA/JK/HK-beräkningen vid målföljning på ”rätt stegpinne”. I annat fall påverkas beräkningen mer eller mindre negativt..
Vapenverkan; Bedömdes som MyG för RB71 vid Rr-följning på ”tätt stegpinne”, i annat fall MiG – I beroende på inom skjutgränserna. För RB74/24J träffsannolikheten som MyG förutsatt signal från RB målsökare och inom skjutgränserna.
De problem som uppstod i flygradar PS46 funktioner och som inverkade på förutsättningarna för vapenverkan på de utvalda målen kunde tack vare möjligheten till en noggrann verifiering av de tekniska delfunktionerna vid de olika störformerna leda till att tekniska ändringar, hårdvarumässiga och i datorprogram kunde införas i radar PS46. Väsentliga sådana var bl a; Införande av ny processor i SBE för upprättande av en digital dopplerfilterbank för bättre måleko- och störningsutvärdering. Införande av ny processor i STY för bättre övervakning av flera målrörelser och snabbare funktionsväxlingar. Införande av snabb variabel frekvensstyrning av sändare och mottagare.
Dessa ändringar medförde ökade förutsättningar för stabil målföljning trots störning fram till avfyring av respektive robot.
Övningsstörutrustningarnas fördelar och nackdelar i fredstidFördelar:
Nackdel:
Övrigt: Kraftigt moraliskt degraderande störformer kan verifieras och undvikas under fredstjänsten.
SammanfattningBetydelsen av för FV under 1960 – 1980-talet framtagna Övningsmotmedel kan sammanfattas med att;
Mer att läsaPå vår webb finns mer att läsa om motmedel under rubriken ”Avionik/Motmedel”. Där kan man läsa historiska artiklar om motmedel, tekniska artiklar om bakomvarnare, radarvarnare, kapslar för remsor och facklor, övningsutrustningar mm. Bland annat finns där tekniska beskrivningar av de övningsutrustningar som texten här ovan handlar om. Gunnar Lindqvist, f. 1926, svensk flygmilitär och flygingenjör, generalmajor och chef för FMV huvudavdelning för flygmateriel 1980–89 har kompletterat och kommenterat Göran Hawées skrift. Kan läsas här. |