Bakgrund
Under
1953 mottog flygvapenledningen information från England om att
tyngdpunkten i en framtida stormaktskonflikt skulle ligga inom ”luftkrigområdet”.
Flygplanen kunde med readrift flyga mycket snabbare och operera på högre
höjder. Målsökande luftvärnsrobotsystem skulle kunna användas mot mål på
höga höjder. Effektivare radarsystem kunde med större noggrannhet
identifiera mål på betydligt högre höjder.
Med
digitalteknik förutsågs att jaktflyg och robotar skulle kunna styras mot
mål på näst intill realtid. Möjligheterna var hisnande. Ett samarbete
inleddes med MOD i England.
Samma
år startades här i Sverige utredningen Spaning och stridsledning i
luftförsvaret (SOS). SOS blev en övergripande och mycket omfattande
utredning rörande frågeställningar om datainsamling samt framtagning och
presentation av informationsunderlag.
Särskilda studier gjordes av möjligheterna att använda automatiska
hjälpmedel för målföljnings- och stridsledningsberäkningar. 1954
överlämnade CFV till ÖB en utredning innehållande en första skiss till
ett nytt system som kom att benämnas ”Kristallkulan”. Detta blev
starten för Stril-60.
Stril
60 var ett unikt ledningssystem för luftstridskrafterna. Systemet var
mycket komplext och här berörs enbart de markbaserade delarna.
1955
köptes fyra radarstationer PS-08
från England som samgrupperades med höjdmätare
PH-12 och installerades vid
Östersjökusten.
Radarstationerna installerades med var sitt operatörsrum. Med den på sin
tid enorma räckvidden av 400 km vidgades luftförsvarets horisont
väsentligt och med de nya kraftfulla radarstationerna konstaterades att
verksamheten över Östersjön var mer omfattande än man trott.
I mars
1959 fick SRF (SRT) i uppdrag att ta fram ett digitalt
målföljningssystem med dataledning i form av
styrdata av flygplan 35 från de fyra
PS-08 platserna.
Det
fick namnet Stril m/59 och var med internationella mått ett tekniskt
mycket avancerat system. Detta var ett provsystem som bekräftade att den
nya tekniken fungerade.
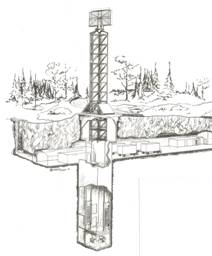
Ledningscentraler
Kärnan
i Stril 60 var ledningscentralerna där de stora var Lfc typ 1. Avsikten
var att bygga fyra Lfc typ 1, men av ekonomiska skäl reducerades antalet
till två. I stället moderniserades tre Lfc M/50 som dock fick betydligt
enklare ledningsmöjligheter. De benämndes Lfc typ 2.
Under
projekteringen av Lfc typ 1 stod det klart att informationsmängden var
för stor för Lfc att klara av varför ytterligare anläggningar behövdes
för att filtrera informationen från luftbevakningsstationerna. Lösningen
blev det som internationellt kallades LAFC (Low Altitude Filter Centre)
och som på svenska blev radargruppcentraler, Rrgc.
Åtta
fasta radargruppcentraler (Rrgc/F) och
fyra rörliga (Rrgc/T) anskaffades. Den första driftsattes 1966.
Radarstationerna PS-65 och
PS-66 försågs med operatörsrum med
plats för Radarobservatörer (Rrobs) som, när de var i operativ drift,
rapporterade till Rrgc/Lfc typ 1.
Vid
radarstationerna PS-15 fanns ett
operatörsrum som i begränsad omfattning kunde användes.
Det
tekniskt största och viktigaste delsystemet i ledningscentralerna var
databehandlingsutrustningen (DBU).
Med
hjälp av denna utrustning presenterades informationen från
radarstationerna som identifierades varefter beslut togs om insats.
Detta överfördes med styrdata över Radiosändare
Fmr-10 till jaktflygplanen.
Radar
1954
tillsattes en luftförsvarsradarutredning (LFRU) för att utreda hur de
framtida radarstationerna skulle utformas.
Den
första radarstationen som anskaffades efter LFRU:s normer var fyra
höghöjdsradarstationer PS-08. Ytterligare behov av höghöjdsradar fanns
varför nio radarstationer PS-65 inköptes och började att installeras
under mitten av 60-talet.
Detta
följdes av anskaffning under andra halvan av 60-talet av fem
radarstationer PS-66 som var en kraftfull medel- och höghöjdsradar. Nu
hade behov av en låghöjdsradar uppstått vilket resulterade i att 15
radarstationer PS-15 anskaffades
och började installeras under slutet av 60-talet.
Utredningen SUS 70 framhöll att en störfast radarstation som kunde
motstå fysisk bekämpning behövdes vilket resulterade i anskaffning av
radarstation PS-860 där den första radarstationen togs i drift 1981.
I
samband med att smalbandsöverföring (SBÖ)
av radarinformation infördes blev radarstationerna, genom det förmedlade
nätet, tillgängliga för samtliga ledningscentraler inom landet.
Radio
Stril-60 innebar en stor förändring av radiosystemet för stridsledning
och begreppet Stri-radio infördes. Speciella
manöversignalomformare (MSO 1225) togs fram för överföring av
nycklings- och anropsinformation. Med detta kunde godtycklig radiokanal
inom landet anslutas till enskild ledningscentral.
För
överföring av styrdata till flygplan användes Radiosändare
Fmr-10 som var en 10 kW sändare på
VHF-bandet. Inledningsvis användes radiostationerna
RK-01, RK-02
och Fmr-7.
Under
70-talet infördes talsamband på UHF-bandet med radiostationerna
Fmr-18, Ra-730
och Ra-745.
Avsiktlig störning var det stora hotet mot radiosambandet varför
sändarna försågs med effektsteg.
Telenät FTN
Stril-60 byggdes upp med ett landstäckande telenät, FTN
(Försvarets
TeleNät). Det utgjordes av Televerkets trådnät samt av
Försvarets fasta radiolänknät
(FFRL).
Datakommunikationen ställde stora krav på överföringarna bland annat för
överföring av styrdata och målinformation mellan radarstationer och
ledningscentraler. Speciella modem togs fram för dessa ändamål där
Sverige var en de första nationerna i västvärlden med införandet.
För mer
info om trådnätets utbyggnad, se separat
Tidslinje Försvarets
Trådnät.
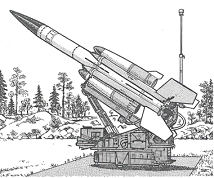
Robot
Efter
andra världskriget visade studier inom både arméstab som flygstab på
nödvändigheten att förstärka luftförsvaret (kanonluftvärn och jaktflyg)
med robotar med lång räckvidd och hög träffsannolikhet.
Av
denna anledningen anskaffade flygvapnet robot 68, främst på grund av
detta vapensystems förmåga att bekämpa snabba mål på höjder ovanför våra
jaktflygplans praktiska verkanshöjd.
Systemet avsågs att bl.a. täcka in luckor i luftförsvaret för flyghöjder
15 - 25 km och avstånd upp till c:a 25 mil.
Anskaffningen planerades under 1950-talet.
I CFV
programplan 1972 föreslogs på grund av det allt kärvare ekonomiska
klimatet inom försvaret, att robotsystem 68 skulle läggas ned.
RB 68-förbanden var kvar i tjänst inom FV till slutet av
1970-talet.
CVA:s roll
CVA var
aktivt inom flera områden vid införandet av Stril-60 samt under den tid
som systemet var i operativ drift.
Inom
radar, radio, transmission och radiolänk var CVA tekniska konsulter till
KFF/FMV vilket innebar att vi på uppdrag tog fram specifikationer för
upphandling, kontroller av levererade utrustningar samt utförde
driftsättningar. Vi var också tekniskt underhållsstöd och central
verkstad.
CVA:s
installationsavdelning hade stora arbetsuppgifter vid införandet av
Stril-60.
Skrivet av Arne
Larsson
Senast uppdaterad: 2025-08-23
Stril 60 En broschyr (1999)
Läs mer i FHT-dokument:
|